编队对潜作战中抗友邻舰干扰方法*
2012-09-02范文涛章新华夏志军
范文涛,章新华,夏志军
(海军大连舰艇学院,辽宁 大连 116018)
水面舰艇编队对潜作战中,各种声纳担负起编队远、中和近三个区域警戒与搜索任务,其中拖曳线列阵声纳作为超远程探测水下目标的主要手段,是水下预警体系的重要组成部分[1]。然而,被动拖曳线列阵声纳由于其自身的物理特点导致在编队对潜作战使用方面不像雷达[2]、舰壳声纳[2]那样有章可循。拖曳线列阵声纳的湿端是细长的柔性阵[1],使用后编队的队形配置和机动性受到较大制约,特别是拖曳平台的自噪声和编队内部友邻舰辐射的噪声会对拖曳线列阵声纳造成较大影响,会在声纳检测系统端首尾和友邻舰方向形成较宽的检测盲区[3]。拖曳平台自噪声产生的盲区可以通过加大拖缆长度、减小拖速等方式进行补盲,但是友邻舰形成的检测盲区的补盲方式却要复杂得多。因此,研究编队中友邻舰对他舰拖曳线列阵声纳干扰的影响及抗干扰方法的作战使用是十分有必要的。
抗友邻干扰分为硬对抗和软对抗两类[4]。硬对抗又可称为“硬补盲”,指的是利用两条以上的拖曳线列阵声纳按照一定的队形互相弥补干扰形成的检测盲区。“硬补盲”的优点在于补盲效果较好,缺点在于编队中多条拖曳线列阵同时工作严重影响了编队运动的灵活性,不利于编队防空反导作战。软对抗又可称为“软补盲”指的是利用工程上成熟的抗干扰算法在拖曳线列阵声纳信号处理级实现干扰盲区的抑制。“软补盲”的优点在于使用简单、利于编队战术机动,缺点是易受拖曳线列阵阵形、环境噪声等级等因素影响。目前针对抗编队内友邻干扰的研究基本集中在“硬补盲”方法作战使用上,对于“软补盲”方法作战使用的研究国内外鲜有文献提及。从国外研究来看,美、英、法和德等国家使用拖曳线列阵声纳最为成熟,但是关于编队条件下拖曳线列阵声纳作战使用和编队配置的资料几乎没有。郭书城[4]等分别从不同方面研究了编队使用拖曳线列阵声纳时的编队配置问题。但是,他们的研究结论都是建立在声纳检测性能参数理想化的前提下,忽略了拖曳线列阵声纳实际使用时检测性能是动态变化的因素。因此,只有结合信号级的检测结果探讨拖曳线列阵使用与编队配置的关系才具有实际军事应用价值。相比之下,“软补盲”方法更符合海军未来反潜作战“速战速决、高效精确”的战术思想[5]。
本文从干扰影响和使用效果两个角度入手,利用工程上成熟的两种“软补盲”抗干扰方法,通过仿真手段研究编队平行搜索方式下未抗干扰和抗干扰后对于被动拖曳线列阵声纳检测性能产生的影响差别,并依据仿真结果给出平行搜索方式下使用“软补盲”抗干扰方法后的队形配置建议与作战指挥原则。
1 基本战术想定
1.1 战术想定
反潜编队由两艘导弹护卫舰组成,其中只有一艘配备被动拖曳线列阵声纳。编队的配置要求:防潜时有利于保护指挥舰;便于指挥舰对编队的指挥;便于火力抗击空袭目标。平行搜索方式[7]即是兼顾了防空、通信与反潜的一种编队队形配置方案,包括方位队与横队两种队形。编队配置如图1所示,其中α为编队看齐角,R为舰距,β为敌目标与友邻舰的方位间隔。

图1 编队配置及坐标系
1.2 友邻舰干扰模型及影响
友邻舰艇干扰的空时频特性:第一,干扰空间位置随着编队队形的变化而改变;第二,干扰辐射噪声频谱的非平稳性要比本舰辐射噪声的大;第三,干扰所形成探测盲区的大小与传播环境密切相关,比起本舰自噪声引起的检测盲区空间位置,干扰所形成的检测盲区对声纳系统远程警戒的影响更严重。以浅海声传播环境为例,拖曳线列阵声纳单个基元所接收到的具有多途角扩展的友邻舰辐射噪声干扰数学模型为[5]其中am为多途衰减,τm为多途时延,θm为多途干扰入射角,L为多途路径个数,i为基元序列号,d为基元间隔,c为海水声速,I(t)为干扰波形。深海环境下的干扰数学模型与浅海类似,区别是拖曳线列阵可以选择的工作深度大大灵活,来自海底与海面的多途干扰影响减小[6]。

通过信号级拖曳线列阵声纳模拟器产生基阵接收数据,分别利用声纳系统中常用的两种波束形成检测方法分析友邻干扰对拖曳线列阵检测性能的影响。图2(a)、(b)和(c)分别为友邻干扰与拖曳线列阵的距离在5链、15链和25链处的宽带警戒方位-幅度图和窄带警戒频率-方位图,可以看出随着友邻干扰与基阵的间距扩大,干扰能量在方位-幅度图上有略微变“瘦”的趋势,但是不明显;在以极坐标方式显示的窄带警戒频率-方位图中,随着干扰的远离,干扰的在各个频点处的能量减弱。由此可以得到结论:友邻干扰所形成的盲区范围随着干扰的远离而缩小,但是缩小趋势不明显。
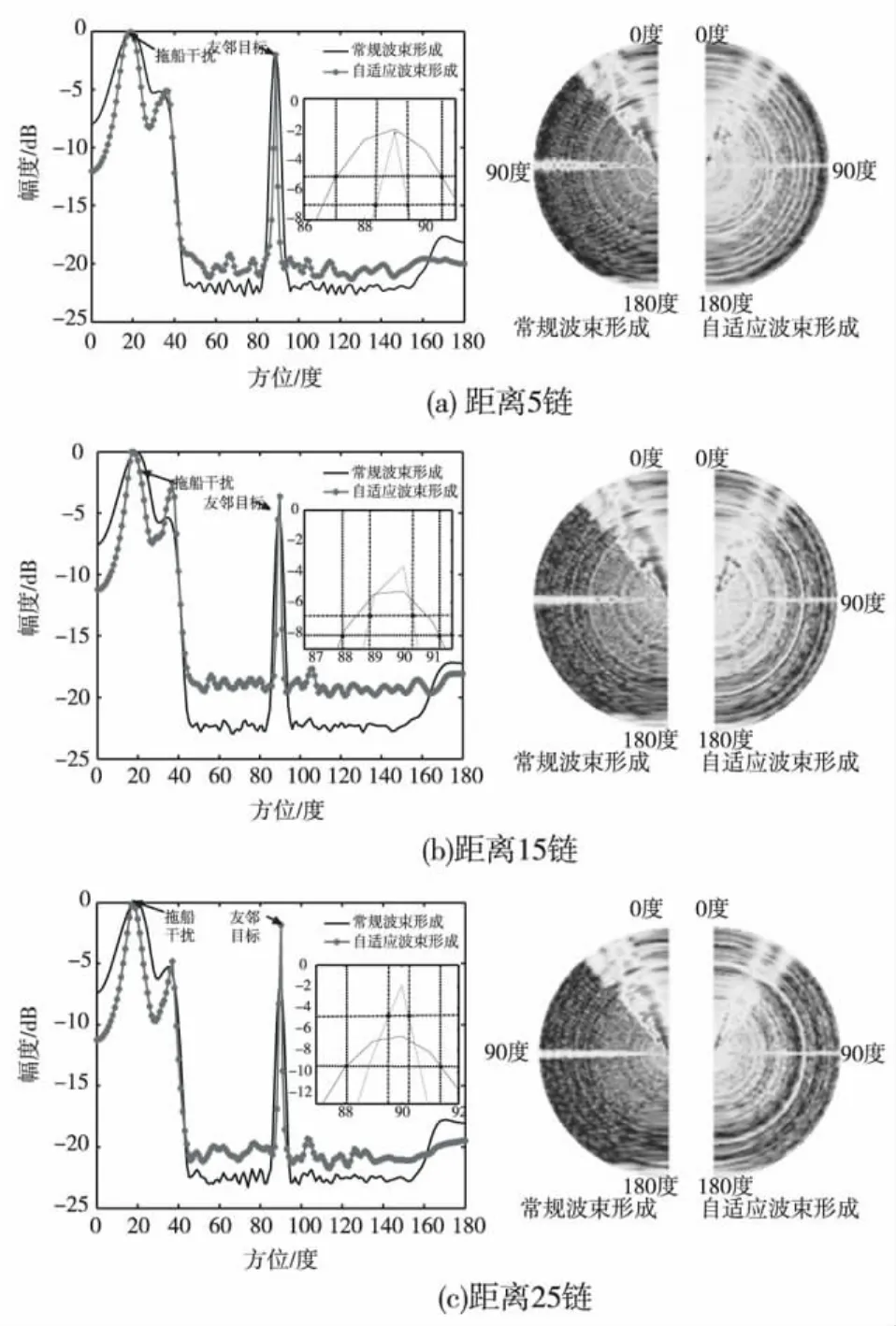
图2 友邻干扰与拖曳线列阵不同距离时的宽带警戒方位-幅度全景图与窄带警戒频率-方位图
图3(a)和(b)为友邻干扰在不同方位处时的宽带警戒方位-幅度图与窄带警戒频率-方位图,其中假设友邻干扰与基阵的距离为25链。可以看出,当友邻干扰位于40°时,产生了近10°左右的干扰盲区;当友邻干扰移到方位140°处可以更明显的看出友邻干扰所形成的干扰盲区。比较图3与图2(c)会发现,同样的距离条件下,友邻干扰位于基阵正横处形成的盲区范围要小于其他方位处。这是由于两方面原因造成的:第一,线列阵在正横附近的波束主瓣宽度要比其他方位处的主瓣宽度小[5];第二,平面波假设下,位于水平线列阵的正横方位时的有效孔径利用率要高于其他方位处,意味着波束形成器在正横处的多途抑制能力要明显高于其他方位处,越靠近阵列端首方向的抗多途能力越差。
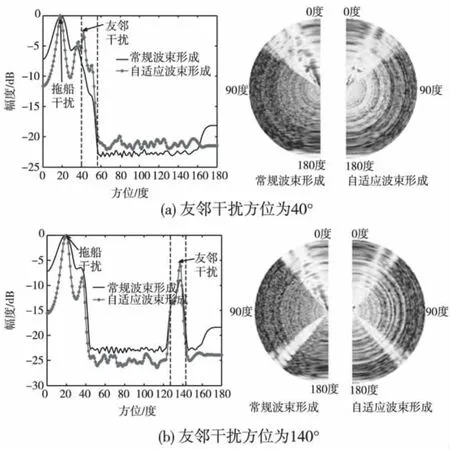
图3 友邻干扰在不同方位处时的宽带警戒方位-幅度全景图与窄带警戒频率-方位图,友邻干扰距离25链
图4(a)和(b)为友邻干扰位于拖曳线列阵不同舷侧时的干扰影响方位-幅度图,其中(a)为友邻干扰与目标位于拖曳线列阵同一舷侧,方位错开10°,(b)为友邻干扰与目标位于拖曳线列阵另一舷侧,方位错开10°。比较图4的(a)和(b)可以看出,不管是目标与友邻干扰是否位于同一舷侧,对于拖曳线列阵被动检测来讲几乎等强度。这主要是因为拖曳线列阵的轴向对称性,如果目标或者干扰出现在左(右)舷,那么在右(左)舷也将出现一个等强度的镜像源。
2 抗友邻干扰方法
2.1 波束形成后置干扰抵消
Godara研究提出了波束形成后置干扰抵消器(Postbeamformer Interference Canceler,PIC)[7]。PIC 处理器利用固定或自适应权系数形成目标波束和干扰波束,将干扰波束信号从目标波束中减去,以形成PIC输出。设空间含一个目标信号和一个干扰信号,则接收信号向量表示为

图4 友邻干扰位于拖曳线列阵不同舷侧时的干扰影响分析,友邻干扰距离25链,水下目标距离10海里

PIC输出为

PIC方法的优点是:1)波束域干扰抵消,利于声纳后续处理;2)时域与频域均可抵消;缺点是:1)对系统处理能力和实时性要求高;2)无法同时抵消两种典型干扰;3)干扰抵消不彻底。PIC方法广泛应用于美国海军AN/SQR-19和日本海军OQS-1拖曳线列阵声纳[8]。
2.2 逆波束形成干扰抵消
逆波束形成干扰抵消(Inverse Beamforming,IBF)两种[7]。IBF的基本思想是重建只含有干扰分量的基阵接收信号,利用原始的基阵接收信号减去重建后的基阵信号则认为完成了干扰抵消。因此IBF的输出为

其中,x(t)为式(2)中的原始基阵接收信号,x仅含干扰(t)为重建后仅含有干扰的基阵接收信号。
IBF方法的优点是:1)基元域干扰抵消,方便后续处理;2)干扰抵消彻底,能同时抗两种典型干扰;缺点是:1)只能在频域进行处理,计算量需求高;2)干扰抵消后,容易形成虚警目标。IBF方法广泛应用于欧盟海军拖曳线列阵声纳[9]。
3 抗友邻干扰效果仿真分析
3.1 仿真设置
仿真考虑图5战术想定中编队平行搜索方式下的8种可能组队队形,其中B1~B5为方位队队形配置区域,H1~H3为横队队形配置区域。8块区域的划分按照两舰舰距上分为近程(5链~20链)、中程(20链~30链)和远程(30链~50链);两舰看齐角上分为前方(20°~70°)、正横方(70°~80°)和后方(80°~160°)。划分的依据是兼顾了编队防空反导武器和通信的需要。由上文干扰影响可知,友邻干扰对拖曳线列阵声纳左右舷影响相同,因此仿真中只考虑友邻舰位于右舷的态势。仿真利用信号级拖曳线列阵声纳模拟器产生各态势所需的基阵接收数据,利用声纳信号处理工具融合上文介绍的两种抗友邻干扰方法得到抗干扰后的结果。
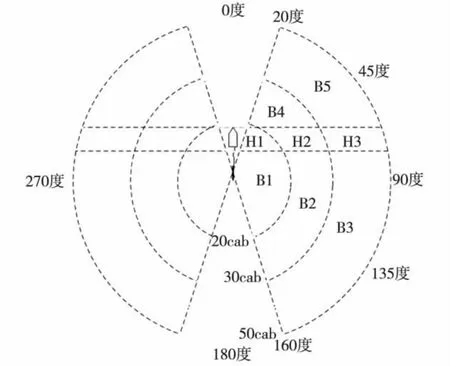
图5 编队队形配置分区图
3.2 仿真结果
图6为友邻舰位于图5中B1~B5和H1~H3的每个区域时,本舰拖曳线列阵声纳未抗干扰、利用PIC抗干扰和利用IBF抗干扰后得到的窄带警戒频率-方位图。以图6中(a)为例可以看出,当本舰拖曳线列阵声纳未抗干扰时,友邻舰形成压制性(漆黑)干扰使得声纳系统无法检测出敌潜艇目标能量;当本舰拖曳线列阵声纳使用PIC或者IBF抗干扰方法后,友邻干扰所形成的盲区产生了分裂使得声纳系统检测到了敌潜艇目标能量。(b)~(h)的分析结果与(a)类似,由此可以证明使用抗干扰方法能够一定程度消弱友邻干扰的影响。

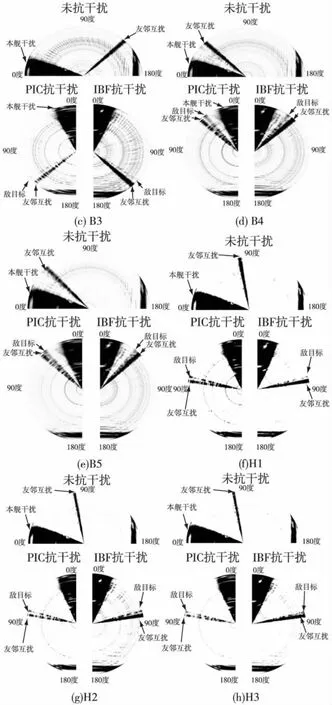
图6 窄带警戒频率-方位图
表1为对图6中未使用抗干扰方法和使用抗干扰方法得到的最小间距角与目标检测增益统计结果。最小间距角指的是本舰拖曳线列阵声纳系统所能检测到的友邻舰与感兴趣目标的方位角之差的最小值。由此可见,求使用和未使用抗干扰方法所得到的最小间距角之差可以得到友邻干扰盲区的缩小度数值。目标检测增益指的是本舰拖曳线列阵声纳系统对感兴趣目标所检测到的高出背景的幅值大小,单位为dB,显然该值越大表明检测效果越好。从表1中可以看出,当友邻舰位于B5和H3区域时使用抗干扰方法后的检测效果是最好的,而位于B1~B3区域时使用抗干扰方法后的检测效果相对要差。这是因为从图5中各区域与本舰拖曳线列阵的几何关系可以看出,B4、B5、H1~H3相比其他区域更靠近拖曳线列阵的正横,而基于波束形成的拖曳线列阵声纳检测方法在越靠近正横的波束主瓣越窄、旁瓣越低,因此干扰抑制能力也越强,这也验证了图3所示的结论。从表1中还可看出,友邻舰艇位于H1~H3时使用抗干扰方法后各个区域得到的检测结果的变化不如B1~B5时的变化大,由此证明横队队形是最利于双舰单拖对潜警戒时抗友邻干扰方法效果的发挥。

表1 最小间距角与目标检测增益统计
4 结束语
本文研究了舰艇编队对潜远程警戒时抗友邻舰干扰“软补盲”方法作战使用问题。通过仿真分析友邻干扰的干扰盲区和左右舷影响,得到以下两点结论:1)友邻干扰位于基阵正横处形成的盲区范围要小于其他方位处;2)单条拖曳线列阵不具备区分左右舷能力,友邻干扰位于左舷(右舷)会相应在右舷(左舷)出现等强度镜像干扰源。因此不管感兴趣目标与友邻干扰在同一舷侧或是位于友邻干扰的镜像舷侧,对于拖曳线列阵声纳的检测结果没有差异。
通过仿真当编队采用双舰平行搜索且只有一条拖曳线列阵声纳工作方式时,各种队形配置下“软补盲”方法的使用效果,得到如下作战使用原则:
1)编队采用平行搜索方式,横队队形配置比方位队更利于“软补盲”方法抗友邻舰干扰效果的发挥。
2)编队队形为横队方式,拖曳舰与友邻舰舰距范围在20链~30链,两舰看齐角范围在75°~80°;拖曳舰与友邻舰舰距范围在30链~50链,两舰看齐角范围在70°~80°。
3)当编队队形为方位队时,拖曳舰与友邻舰舰距范围在20链~30链,两舰看齐角范围在45°~70°;拖曳舰与友邻舰舰距范围在30链~50链,两舰看齐角范围在30°~70°。
4)当编队中拖曳舰与友邻舰看齐角范围在90°~160°时,两舰舰距至少为30链。
[1]杨福渠,等.单舰反潜[M].大连:海军大连舰艇学院,2000:25-30.
[2]阎福旺,等.现代声纳技术[M].北京:海军出版社,1998:2-8.
[3]章新华,康春玉,夏志军.声呐原理[M].大连:海军大连舰艇学院,2005:12-18.
[4]郭书城.拖曳线列阵声呐在水面舰艇护航编队对潜警戒中的使用研究[D].大连:海军大连舰艇学院,2004:49-51.
[5]R.J.尤立克.水声原理[M].哈尔滨:哈尔滨船舶工程学院出版社,1990:73-75.
[6]槐万景,尹四德.海上编队双(多)基地声呐探潜问题初探[J].海军大连舰艇学院学报,2003,26(5):54-57.
[7]丛卫华.自适应拖船噪声抵消技术研究[D].哈尔滨:哈尔滨工程大学,1999:43-47.
[8]王庆光,张文玉,宋汝刚.西方海军远程探测声纳发展现状[J].舰船论证参考,2004(2):44-45.
[9]宋新新,毛娜.德国声纳技术发展100年[J].舰船电子工程,2004(2):19-21.
