人-机运动相容型下肢康复训练外骨骼机构的构型设计与分析
2012-08-13李剑锋吴希瑶邓楚慧马春敏范金红刘德忠
李剑锋 吴希瑶 邓楚慧 马春敏 范金红 刘德忠
(北京工业大学机械工程及应用电子技术学院,北京 100124)
引言
穿戴型下肢康复训练外骨骼是典型的人-机一体化系统,人-机穿戴连接后外骨骼机构与人体下肢构成空间多环封闭运动链,康复训练过程中人-机之间通过连接部位的相互作用实现协同运动。因此,要求外骨骼机构与下肢之间不能出现过强的约束作用,以避免由此导致的舒适性变差和患肢的二次损伤。由文献检索及对外骨骼机构的设计特征分析可以看出,现有外骨骼机构的设计还主要基于下肢骨骼的运动结构仿生[1-6]。机构的髋关节为单自由度转动关节或由两个转动关节通过高副低代进行运动等效,膝关节为单自由度转动关节,各关节轴线依人体下肢对应关节的运动功能进行分解布位,构件尺度则根据下肢骨胳参数确定,或将构件设计成调节式结构。在人-机连接方式上,外骨骼机构与下肢之间通过紧致穿戴或绑缚的方式直接相连(固联)。现有设计的优点是借鉴了人体下肢骨胳的运动结构特征,人-机关节之间对应性好,可以获得形式简约的机构构型。构件采用调节式结构,能够增强外骨骼机构对下肢体征变化的适应性。不足之处是较少考虑人-机关节运动属性差异和人-机联接模式对人-机运动相容性的影响,在康复训练过程中还存在着因人-机运动不相容导致的舒适性变差和康复训练难以进行的现象[7-10]。
近年来,穿戴型外骨骼机构的人-机运动相容性设计问题得到了研究者的关注,但均集中于上肢外骨骼机构。例如,文献[11]对上肢外骨骼机构的设计研究现状进行了分析与评述,提出在外骨骼机构设计过程中应充分考虑上肢关节运动属性及穿戴属性对人-机运动相容性的作用与影响[11]。文献[12]研究了上肢肩、肘和腕关节的运动属性以及联接模式对人-机运动相容性的影响,并设计出一种9自由度的上肢外骨骼机构[12]。而目前针对下肢外骨骼机构的人-机运动相容性设计研究还很少,尽管研究者们注意到穿戴型下肢外骨骼机构中存在人-机运动的不相容现象,但均未从外骨骼机构设计的角度探讨改善人-机运动相容性的方法与途径[7-10]。笔者将结合人体下肢刚体骨骼模型的建立、人体直立行走的步态特征分析、人-机关节的运动属性差异分析、外骨骼机构穿戴属性和人-机闭链的自由度分析等,研究人-机相容型下肢外骨骼机构的构型设计问题。通过在人-机连接环节中引入连接关节,提出具有人-机运动相容性的外骨骼机构构型,以改善下肢康复训练外骨骼机构的人-机运动相容性,提高下肢康复训练的舒适性与安全性。
1 人体下肢刚体骨骼模型
1.1 下肢髋、膝关节的运动属性
髋、膝关节是人体下肢中运动灵活性好、活动范围较大的两个关节,它们的生物骨骼结构如图1所示。在人体运动过程中,主要是通过这两个关节的运动协同,实现较大幅度的下肢运动。
髋关节是由髋臼、股骨头及韧带等组成的杵臼(球窝)式滑膜关节[13],股骨头可以在髋臼内灵活转动,但由于髋关节的关节窝较深且关节囊紧致,股骨头与髋臼面之间几乎不发生相对移动。因此,髋关节具有3个独立的转动自由度,可以实现绕图1(a)所示 x1、y1和 z1轴的前屈/后伸、旋内/旋外与内收/外展运动。
膝关节是由股骨下端、胫骨上端、髌骨以及半月板和韧带组成的滑车球状关节[13],其关节囊亦十分紧致,同时又受到内外交叉韧带、胫侧及腓侧副韧带的较强约束。因此,膝关节只有一个转动自由度,能够绕图1(b)所示的 x2轴(在人体下肢中 x1与x2轴平行)做前屈/后伸运动。但由于膝关节接触骨面形状不规则,骨面之间既有相对滚动又有相对滑动,膝关节在绕x2轴转动的同时还伴有关节瞬时转动中心(Instant Centre of Rotation)的滑移运动[14]。
1.2 下肢刚体骨骼模型的建立
由下肢髋、膝关节的运动属性可知,在建立与下肢运动功能相近的刚体骨骼模型时,模型中的髋关节可以由三自由度球副运动等效。但是,膝关节除具有绕x2轴的转动自由度外,关节的瞬时转动中心还伴生与关节转角有确定对应关系的滑移运动。因此,在刚体骨骼模型中不宜直接采用单自由度转动关节对膝关节进行运动等效。可行的方法是借鉴人体下假肢膝关节的设计技术,根据生物膝关节转角与其瞬时转动中心轨迹的对应关系,通过构型与相关参数的优化,设计出与人体膝关节运动功能相近的膝关节机构。图2和图3所示为北京市假肢矫形技术中心设计的4 P20A型四杆机构膝关节以及构件l2和构件l4做相对转动的瞬心运动轨迹,该关节能够较好地模拟中等身高人体下肢膝关节的运动功能。
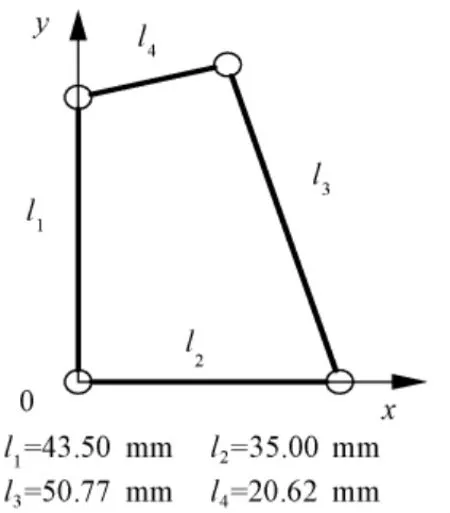
图2 四杆膝关节Fig.2 Four-bar mechanism knee joint
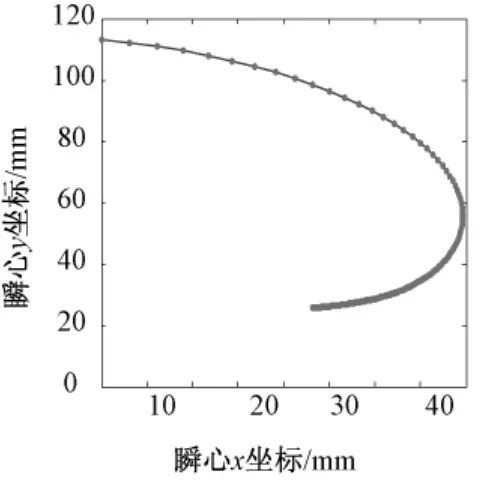
图3 瞬心轨迹Fig.3 Track of rotational instant centre
基于前述刚体髋、膝关节模型并参考下肢的体征参数[15],可以建立与人体下肢运动功能接近的刚体骨骼模型。图4所示为髋关节采用球副、膝关节为4 P20A型四杆机构膝关节时,中等身高人体下肢(H=170 cm,大腿骨长 l5=0.245H=416.5 mm,小腿骨长l6=0.246H =418.2 mm)对应的刚体骨骼模型。
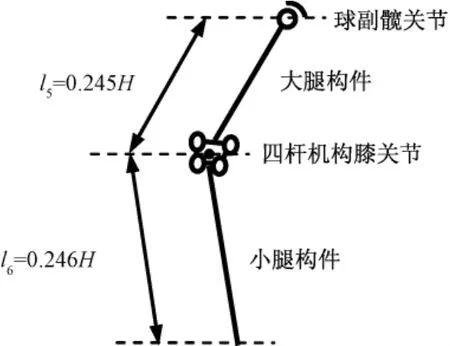
图4 下肢刚体骨骼模型Fig.4 Rigid-body skeletal model of lower limb
2 人-机闭链的运动相容性分析
人体具有很好的运动灵活性,可以实现直立行走、转向、侧摆、下蹲和跑动等多种运动功能。其中,直立行走是人体最重要的日常运动形式,同时也是进行下肢康复训练的主要参照运动形态。人体直立行走运动时的完整步态周期如图5所示[16]。可以看出,在下肢运动过程中髋、膝关节前屈/后伸的运动幅度较大。另外,为了在单相支撑期以及单、双相支撑过渡期调整人体重心位置,以保持身体平衡和控制运动方向,髋关节还存在中等幅度的内收/外展和旋内/旋外运动。
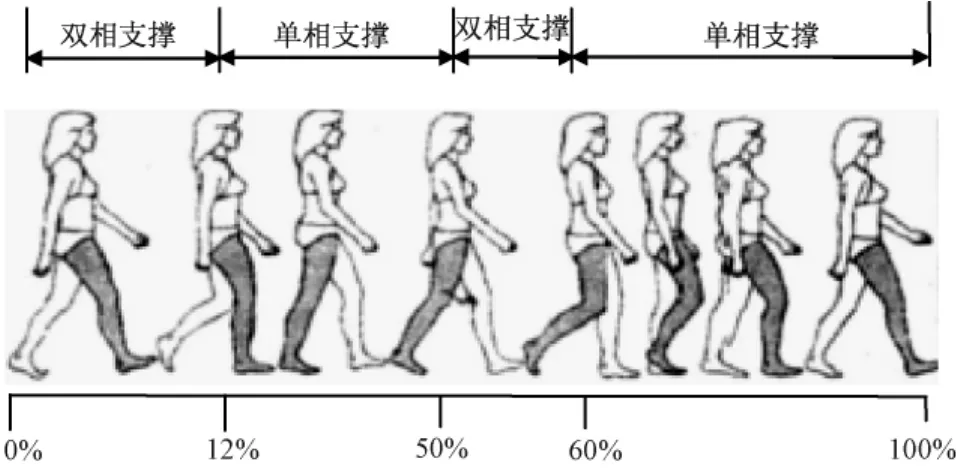
图5 直立行走步态周期Fig.5 Gait cycle of up - stand walking
下肢康复训练外骨骼机构作为人体下肢的穿戴型外联机构,经人-机穿戴连接后与下肢共同组成机构学意义上的空间多环封闭运动链(人-机闭链),其构型设计应满足下肢康复训练的运动需求,并保证训练过程的安全性。相应地,要求外骨骼机构能够引导下肢复现人体直立行走的下肢运动步态,且人-机之间不发生运动干涉与冲突。但是,为了降低康复训练系统的复杂度,现有外骨骼机构的设计主要考虑能够引导下肢实现人体直立行走运动中的前屈/后伸运动,或同时实现前屈/后伸与内收/外展运动。
图6和图7所示为现有的两种外骨骼机构构型及其与人体下肢(刚体骨骼模型)的连接方式。一种是髋关节和膝关节均为单自由度转动关节且关节轴线相互平行的两自由度机构,主要用于下肢前屈/后伸运动功能的康复训练;另一种为三自由度机构,髋关节由轴线彼此正交的两转动关节复合而成,膝关节为单自由度转动关节,其轴线与髋关节第二条回转轴线平行,可用于下肢前屈/后伸与内收/外展运动功能的康复训练。在人-机连接方式上,这两种外骨骼机构均与人体在腰部以及下肢大、小腿的中下部通过紧致穿戴的方式相连接。
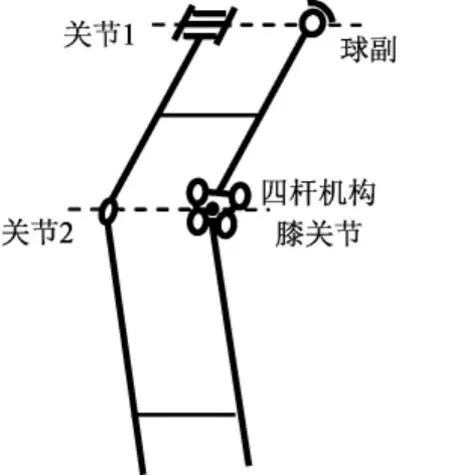
图6 两自由度外骨骼机构Fig.6 Two-DOF exoskeleton mechanism
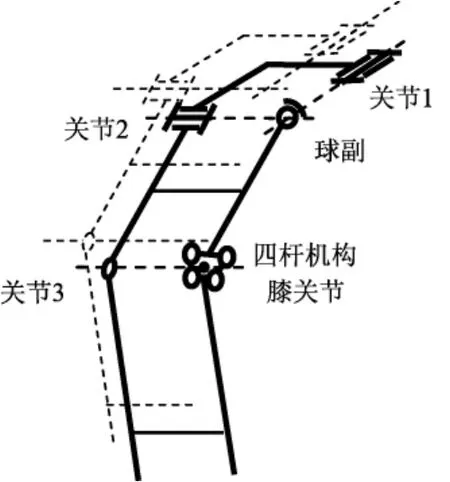
图7 三自由度外骨骼机构Fig.7 Three-DOF exoskeleton mechanism
由图6和图7可以看出,仅由于人-机膝关节运动属性的差异就可能导致人-机运动不相容,原因是人-机闭链中髋关节(不含)以下局部闭链的理论自由度为零。另外,当人-机之间存在连接位姿偏差时,会进一步加剧人-机运动的不相容性。例如,当出现图7虚线所示的连接位姿偏差时,下肢髋关节中点与外骨骼机构髋关节轴线延长线的交点会发生位置偏离,导致人-机闭链中膝关节(不含)以上局部闭链的理论自由度等于零。因此,在现有两种外骨骼机构与人体下肢构成的人-机闭链中,主要是通过连结环节的弹性变形实现人-机运动协调。当弹性变形和约束作用过大时,就会导致舒适性变差、康复训练难以进行或出现安全性问题。
3 外骨骼机构的构型设计与分析
3.1 外骨骼机构构型设计
以图7所示三自由度外骨骼机构为原型,通过在人-机连接环节中增加连接关节,笔者提出一种如图8所示的下肢外骨骼机构。该构型由原有外骨骼机构与连接关节组成,外骨骼机构与下肢刚体骨骼模型构成骨骼-机构联体模型,如图9所示。在联体模型中,机构髋关节的中点与骨骼模型髋关节中心重合,膝关节3的回转轴线与骨骼模型膝关节(四杆机构)轴线平行。外骨骼机构与骨骼模型在大腿构件之间增加了移动副4和胡克铰5,在小腿构件之间增加了移动副6、移动副7和球副8。移动副4和移动副6分别沿外骨骼机构的大、小腿构件移动,移动副7沿垂直于外骨骼机构小腿构件的导路移动。胡克铰5的两条正交回转轴线均垂直于骨骼模型的大腿构件,且其中一条轴线平行于关节2的回转轴线。
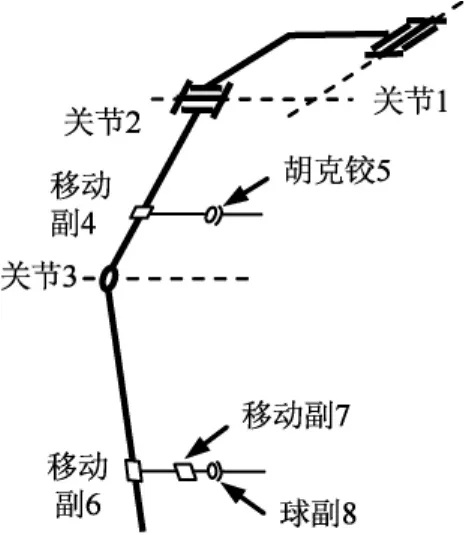
图8 外骨骼机构Fig.8 Exoskeleton mechanism
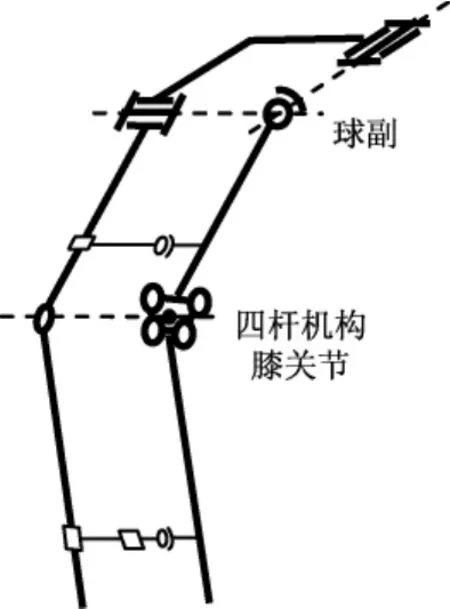
图9 骨骼-机构联体模型Fig.9 Skeleton-mechanism united model
骨骼-机构联体模型由膝上(不含膝关节)和膝下(含膝关节)两局部单闭链串联而成,可先分别确定膝上和膝下两局部单闭链的的自由度,再由两局部闭链自由度之和得到联体模型的自由度。由文献[17]可知,空间单闭链机构的自由度公式为

式中,F为机构自由度,pk为k级运动副数目,λ为闭合约束数。
由于膝上及膝下局部闭链的闭合约束数均为λ=6,由式(1)可得两局部闭链的自由度分别为
再由式(2)和式(3),得到联体模型的自由度为

显然,无论是骨骼模型还是外骨骼机构做主动运动,联体模型均为自由度等于3的运动学恰定系统,人-机之间能够实现完全的运动学相容。
3.2 人-机运动相容性仿真
图10所示为基于 ADAMS软件建立的骨骼-机构联体仿真模型,以及施加的运动副和运动约束。在仿真过程中,骨骼模型的髋关节输入为人体直立行走时的髋关节角位移参数(前屈/后伸与内收/外展运动),四杆机构膝关节的输入需要根据人体膝关节运动数据并结合四杆机构的结构参数进行运动转换,以使骨骼模型中大、小腿构件夹角的运动规律与人体膝关节转角的运动规律相吻合。图11所示为人体直立行走步态周期内,下肢髋关节前屈/后伸、内收/外展及膝关节前屈/后伸运动的角位移曲线[16,18]。
图10 骨骼-机构联体仿真模型。(a)骨骼-机构实体模型;(b)运动副与运动约束Fig.10 Skeleton-mechanism united simulation model.(a)Skeleton-mechanism solid model;(b)Kinematic pairs and kinematic constraints
图11 直立行走的髋、膝关节角位移曲线。(a)髋屈/伸角位移曲线;(b)髋收/展角位移曲线;(c)膝屈/伸角位移曲线Fig.11 Angle displacement curves of hip and knee joints during up-stand working.(a)Angle displacement curve of hip joint flex/extention;(b)Angle displacement curve of hip joint ab/adduction;(c)Angle displacement curve of knee joint flex/extention
四杆机构膝关节与人体膝关节运动数据的转换关系如图12所示。
杆件l4与l2之间的转角β2与人体膝关节转角相对应。令杆件l1与l4之间的转角β1为四杆机构膝关节的运动输入角,由图12所示的几何关系可得

将四杆机构矢量多边形分别向x、y轴投影,有

经式(5)~式(9)转化后,可得到如图13所示的四杆机构膝关节输入转角β1的角位移曲线。
令骨骼模型做主动运动,外骨骼机构做随动运动,对骨骼-机构联体模型进行运动仿真,人-机之间的连接模式如下:
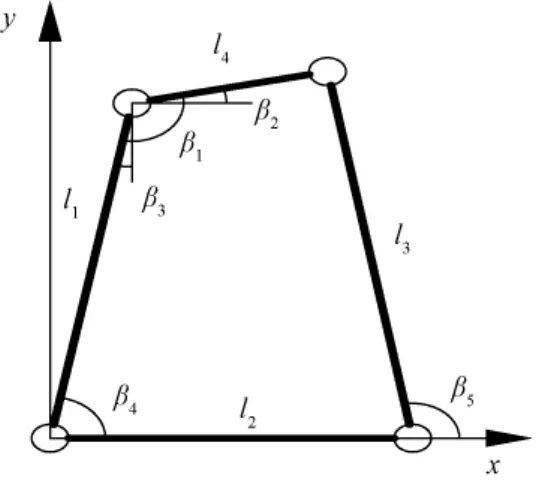
图12 膝关节运动转换Fig.12 Motion conversion of knee joint
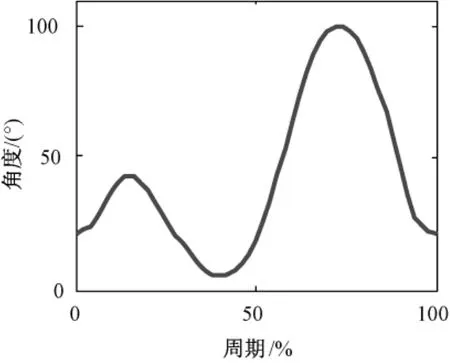
图13 四杆机构膝关节输入角位移曲线Fig.13 Input angle displacement curve of four-bar mechanism knee joint
连接模式1:外骨骼机构与骨骼模型在腰部以及大、小腿构件的中部联接,两者之间无连接位姿偏差。外骨骼机构髋关节轴线延长线的交点与骨骼模型髋关节中心重合,与髋、膝关节对应轴线之间的姿态一致。
连接模式2:外骨骼机构与骨骼模型在腰部以及大、小腿构件的中部联接,外骨骼机构髋关节轴线延长线的交点沿骨骼模型中髋关节坐标系o1-x1y1z1的坐标轴平移[-2-6-7]mm,且外骨骼机构整体绕关节1的轴线顺时针旋转3°。
连接模式1对应的位移曲线、角位移曲线及角位移偏差曲线如图14~图20所示。其中,图14和图15分别为外骨骼机构与骨骼模型髋关节前屈/后伸和内收/外展的角位移曲线与角位移偏差曲线,图16和图17分别为移动副4的位移曲线和胡克铰5的角位移曲线,图18为外骨骼机构与骨骼模型的膝关节角位移曲线及角位移偏差曲线,图19和图20分别为移动副6、7的位移曲线和球副8的角位移曲线。
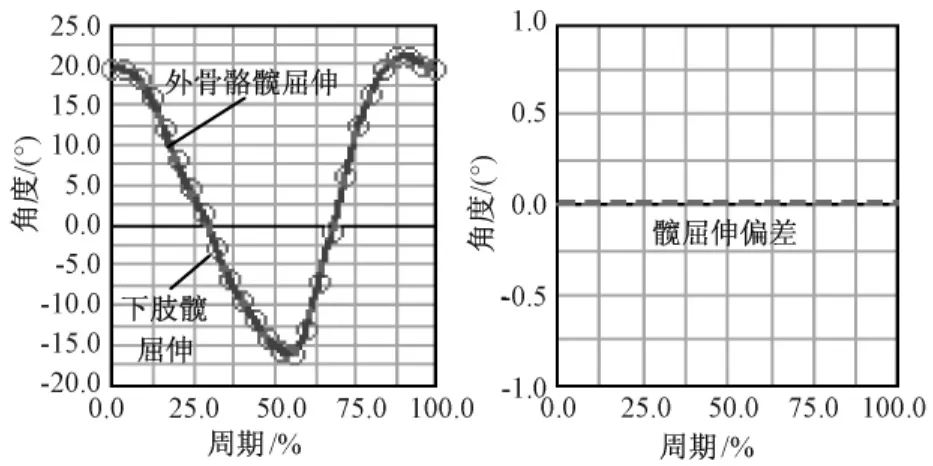
图14 髋关节屈/伸角位移及角位移偏差曲线Fig.14 Angle displacement and angle displacement deflection curves of hip joint with flex/extention
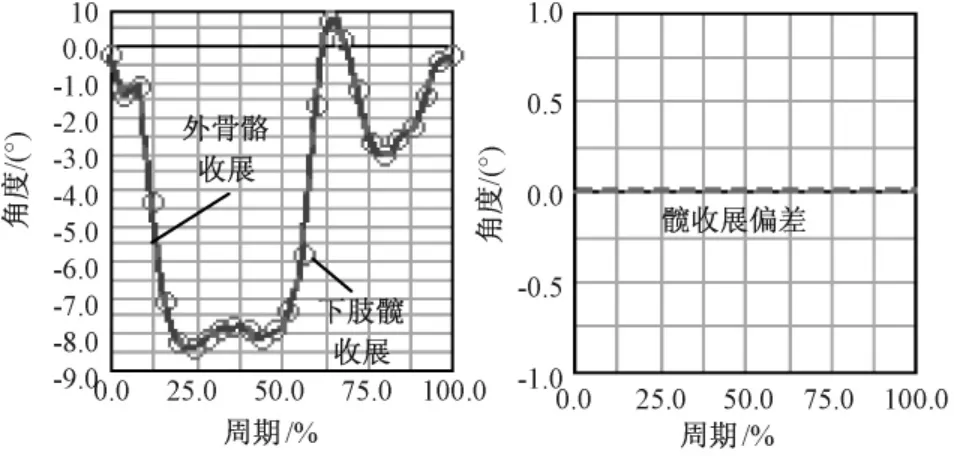
图15 髋关节收/展角位移及角位移偏差曲线Fig.15 Angle displacement and angle displacement deflection curves of hip joint with ab/adduction
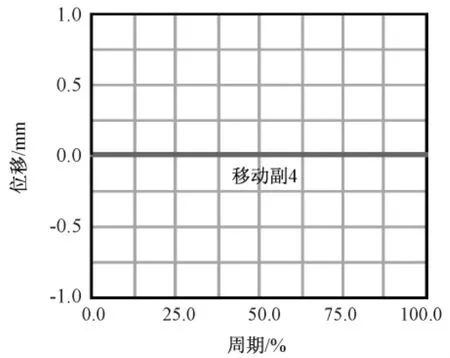
图16 移动副4的位移曲线Fig.16 Displacement curve of 4-sliding pair
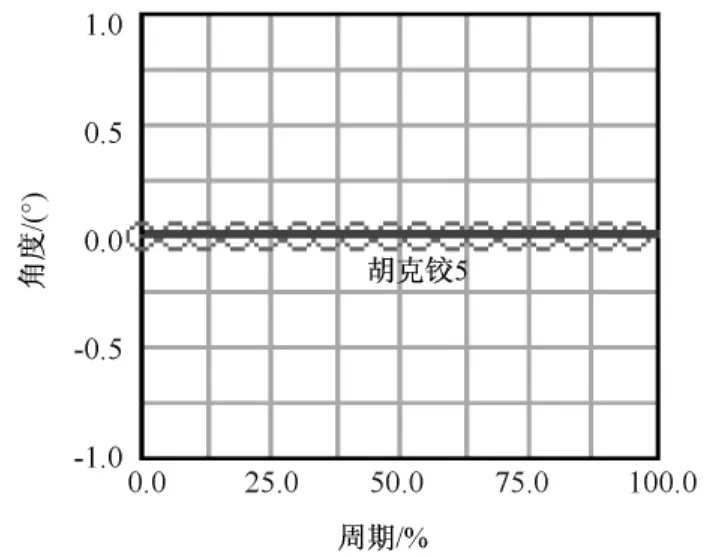
图17 胡克铰5的角位移曲线Fig.17 Angle displacement curves of 5-hooke hinge
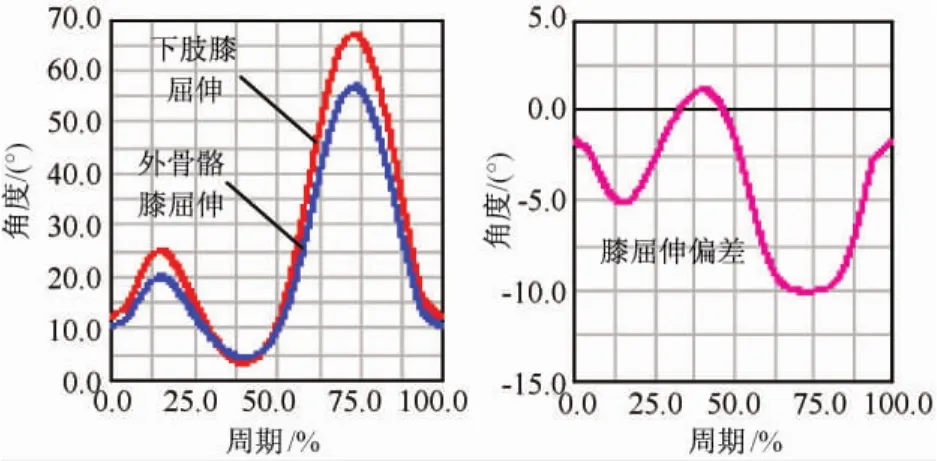
图18 膝关节屈/伸角位移及角位移偏差曲线Fig.18 Angle displacement and angle displacement deflection curves of knee joint with flex/extention
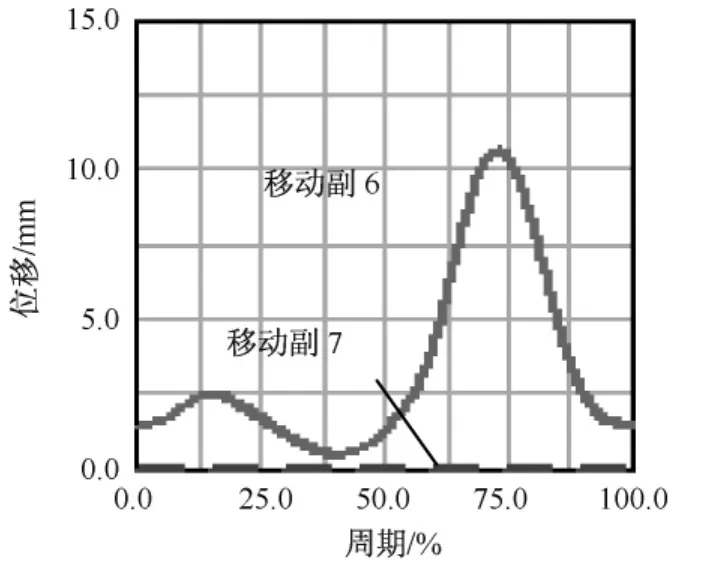
图19 移动副6和7的位移曲线Fig.19 Displacement curves of 6 and 7-sliding pairs
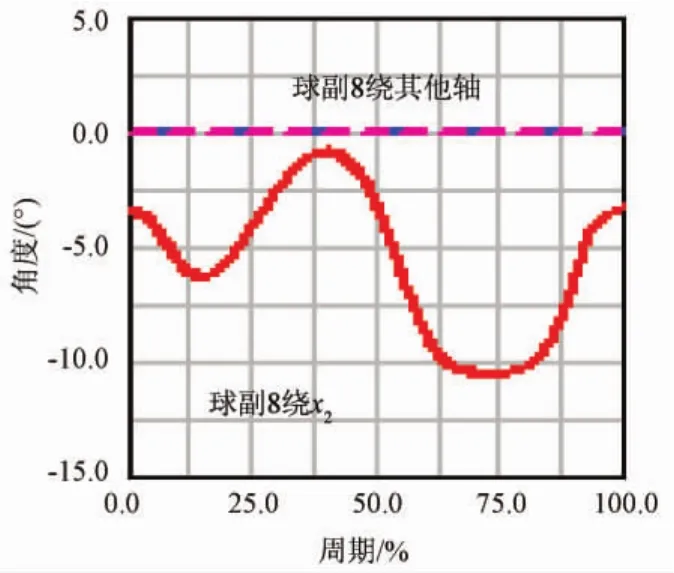
图20 球副8的角位移曲线Fig.20 Angle displacement curves of 8-spherical pair
由图14~图20可以看出,骨骼模型髋关节与外骨骼机构髋关节的运动规律比较吻合,但膝关节运动之间存在较大偏差,最大的偏离角度为10°左右。此外,移动副4、胡克铰5和移动副7无运动输出,移动副6存在最大值为10.5 mm的位移输出,球副8存在绕x1轴且最大值为10.4°的转角输出。
连接模式2对应的位移曲线、角位移曲线及角位移偏差曲线如图21~图27所示。其中,图21和图22分别为外骨骼机构与骨骼模型髋关节前屈/后伸和内收/外展转动的角位移曲线及角位移偏差曲线,图23和图24为移动副4的位移曲线和胡克铰5的角位移曲线,图25为外骨骼机构与骨骼模型的膝关节角位移曲线及角位移偏差曲线,图26和图27为移动副6、7的位移曲线以及球副 8的角位移曲线。
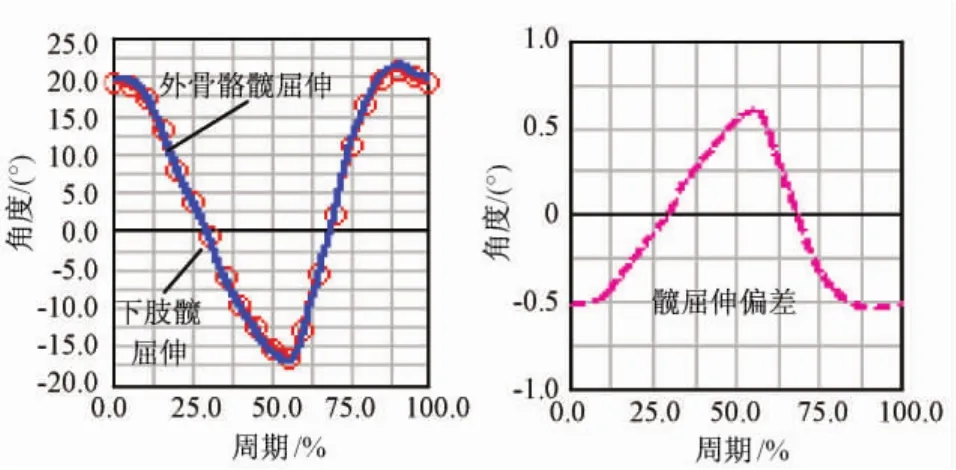
图21 髋关节屈/伸角位移及角位移偏差曲线Fig.21 Angle displacement and angle displacement deflection curves of hip joint with flex/extention
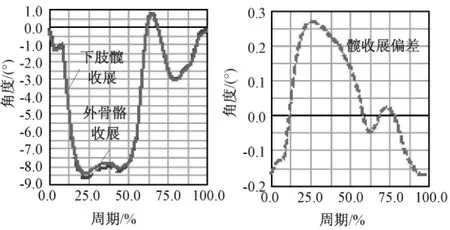
图22 髋关节收/展角位移及角位移偏差曲线Fig.22 Angle displacement and angle displacement deflection curves of hip joint with ab/adduction
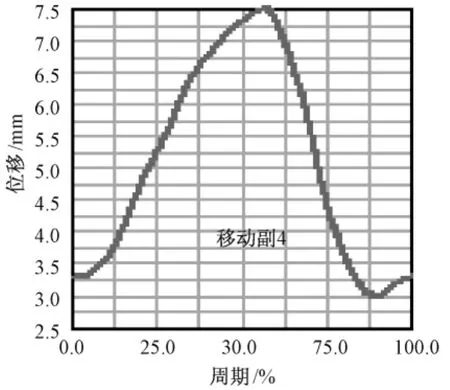
图23 移动副4的位移曲线Fig.23 Displacement curve of 4-sliding pair
由图21~图27可以看出,在人-机连接环节中引入连接关节后,当外骨骼机构与骨骼模型存在连接位姿偏差时,两者之间的运动能够实现完全相容,但外骨骼机构髋关节与骨骼模型髋关节之间出现了运动偏差,膝关节之间的运动偏差也有所增大。同时,所有连接关节均存在运动输出,其中移动副4的最大位移波幅为4.5 mm,胡克铰5绕两轴线转角位移的波动范围分别为[0°,-0.27°]及[-0.63°,-0.5°],移动副7的最大位移量为6.5 mm,球副8绕 y2及 z2轴的最大角位移分别为3.2°和2.1°。此外,与连接模式1相比,移动副6的运动幅度减小了2.5 mm,球副8绕 x2轴转角的波动幅度增加了2.6°。
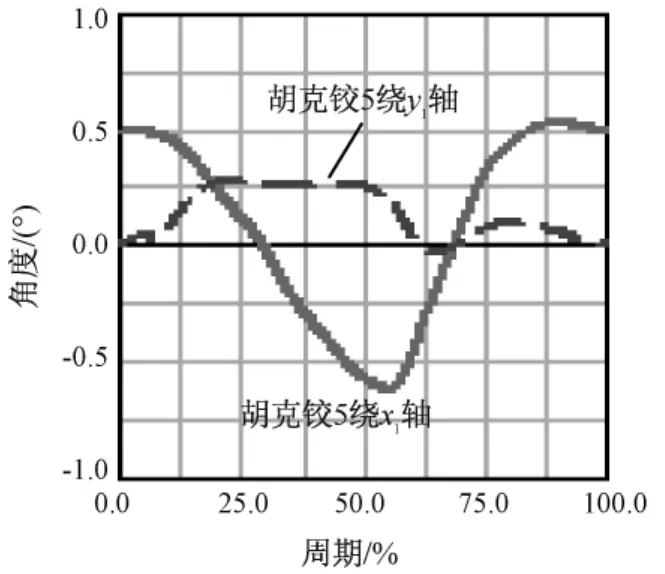
图24 胡克铰5的角位移曲线Fig.24 Angle displacement curves of 5-hooke hinge
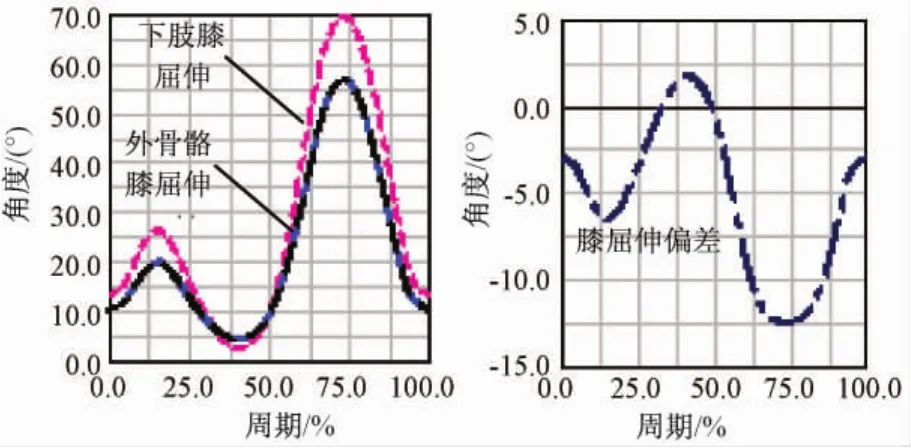
图25 膝关节屈/伸角位移及角位移偏差曲线Fig.25 Angle displacement and angle displacement deflection curves of knee joint with flex/extention
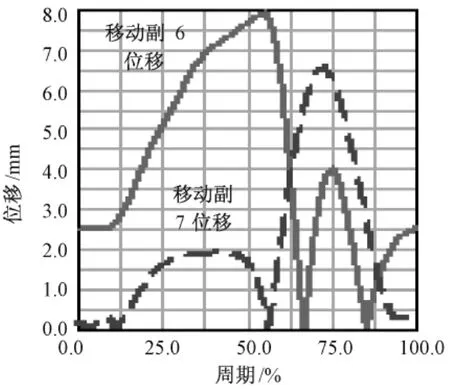
图26 移动副6和7的位移曲线Fig.26 Displacement curves of 6 and 7-sliding pair
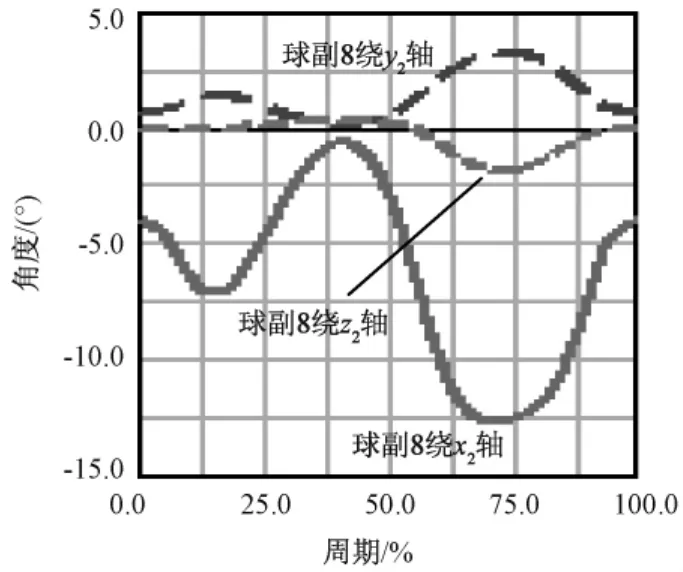
图27 球副8的角位移曲线Fig.27 Angle displacement curves of 8-spherical pair
4 讨论
由模式1和模式2的仿真结果可以看出,当外骨骼机构与骨骼模型之间无连接位姿偏差时,由于人-机膝关节运动属性的差异,导致骨骼模型与外骨骼机构在小腿构件之间存在运动位形偏差。当外骨骼机构与骨骼模型之间存在连接位姿偏差时,骨骼模型与外骨骼机构的大、小腿构件之间均出现了运动位形偏差。因此,在采用如图7所示的三自由度外骨骼机构对下肢进行康复训练且人-机之间为紧致连接时,无论是否存在人-机连接位姿偏差,在康复训练过程中外骨骼机构与人体下肢之间均会发生运动干涉。通过在人~机连接环节中增置连接关节4~8后,可以将联接环节的弹性变形转化为连接关节运动,实现人-机之间运动的完全相容。另外,由于人体下肢关节的不可视性,人-机之间的连接位姿偏差难以完全避免,所以在外骨骼机构中宜保留移动副4、胡克铰5和移动副7,以解除因连接位姿偏差导致的人-机运动干涉现象。
5 结论
1)由于人-机关节运动属性的不同以及人-机穿戴位姿偏差难以完全避免,现有三自由度康复训练外骨骼机构与人体下肢紧致连接后形成理论自由度等于零的人-机封闭运动链。在下肢康复训练过程中,人-机连接环节中存因弹性变形导致的人-机运动不相容现象。
2)通过在人-机连接环节中引入连接关节,笔者提出的康复训练外骨骼机构与人体下肢穿戴连接后形成自由度等于3的人-机封闭运动链,可以将人-机连接环节的弹性变形转化为连接关节运动。因此,无论人-机之间是否存在穿戴位姿偏差,均能够实现人-机运动的完全相容。
[1]Dollar AM,Herr H.Lower extremity exoskeletons and active orthoses:challenges and state-of-the-art[J].IEEE Trans on Robotics and Automation,2008,24(1):144-158.
[2]Yang Chanjun,Zhang Jiafan,Chen Ying,et al.A review of exoskeleton-type systems and their key technologies[J].Journal of Mechanical Engineering Science,2008,222(8):1599-1612.
[3]Agrawal SK,Banala SK,Mankala K,et al.Exoskeletons for gait assistance and training of the motor impaired[C]//Driessen B,Herder J, Gelderblom GJ, eds.Proceedings of 2007 IEEE International Conference on Rehabilitation Robotics.New Jersey:IEEE Computer Society,2007:1108-1113.
[4]Jezernik S,Colombo G,Keller T,et al.Robotic orthosis Lokomat: a rehabilitation and research tool [ J].Neuromodulation,2003,6(2):108-115.
[5]Feng Zhiguo,Qian Jinwu,Zhang Yanan,et al.Biomechanical design of the powered gait orthosis[C]//Liu PX,Ming Aiguo,eds.Proceedings of 2007 IEEE International Conference on Robotics and Biomimetics.New Jersey:IEEE Computer Society,2008:1698-1702.
[6]Veneman JF,Kruidhof R,Hekman EEG,et al.Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation [J]. IEEE Trans on Neural Systems and Rehabilitation Engineering,2007,15(3):379-386.
[7]Colombo G.,Jorg M,Dietz V. Driven gait orthosis to do locomotor training of paraplegic patients[C]//Enderle JD,eds.Proceedings of the 22nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society.New Jersey:IEEE,2000:23-28.
[8]Colombo G.,Joerg M, Schreier R. Treadmill training of paraplegic patients using a robotic orthosis[J].Journal of Rehabilitation Research and Development,2000,37(6):693-700.
[9]Mohammed S,Amirat Y.Towards intelligent lower limb wearable robots:challenges and perspectives-state of the art[C]//Kongprawechnon W,Ming Aiguo,eds.2008 IEEE International Conference on Robotics and Biomechanics.New Jersey:IEEEComputer Society,2008:312-317.
[10]Hidler JM,Wall AE.Alterations in muscle activation patterns during robot assisted walking[J].Clinical Biomechanics,2005,20(1):184-193.
[11]Schiele A,Helm FCT.Kinematic design to improve ergonomics in human machine interaction[J].IEEE Trans on Neural System and Rehabilitation Engineering,2006,14(4):456-469.
[12]Gopura RARC,Kiguchi K.Mechanical designs of active upperlimb exoskeleton robots state-of- the-art and design difficulties[C]//Nagai K, eds. 2009 IEEE International Conference on Rehabilitation Robotics. New Jersey:IEEE Computer Society,2009:178-187.
[13]高秀来,于恩华.人体解剖学[M].北京:北京大学医学出版社,2003:46-49.
[14]James W,Stuart H.Technical note:beyond the four-bar knee[J].Journal of Prosthetics and Orthotics,1998,10(3):77-80.
[15]牛彬.可穿戴式的下肢步行外骨骼控制机理研究与实现[D].杭州:浙江大学,2006.
[16]Zoss AB,Kazerooni H,Chu A.Biomechanical design of the berkeley lower extremity exoskeleton(BLEEX) [J].IEEE/ASME Trans on Mechatronics,2006,11(2):128-138.
[17]张启先.空间机构分析与综合[M].北京:机械工业出版社,1984:49-55.
[18]Cereatti A,Camomilla V,Vannozzi G,et al.Propagation of the hip joint centre location error to the estimate of femur vs pelvis orientation using a constrained or an unconstrained approach[J].Journal of Biomechanics,2007,40(6):1228-1234.
