多移动信标辅助的分布式节点定位方法
2012-08-10崔焕庆王英龙郭强吕家亮
崔焕庆,王英龙,郭强,吕家亮
(1. 山东科技大学 信息科学与工程学院,山东 青岛 266590;2. 山东省计算机网络重点实验室 山东省计算中心,山东 济南 250014)
1 引言
通过在目标区域部署大量传感器节点,可以实现诸如军事防御、目标跟踪、环境监测、空间探索、医疗卫生等诸多应用。对于大多数应用,位置信息可使感知数据获得地理意义;位置信息还可辅助进行无线传感器网络的路由、拓扑管理等,因此,定位成为无线传感器网络的关键技术之一[1]。
无线传感器网络的定位包含网络节点定位和外部目标定位2类问题,前者是后者的基础。节点定位即通过一定的技术、方法和手段获取无线传感器网络节点的绝对或相对位置的过程,可分为基于信标和无信标的定位方法[1,2]。基于信标的方法需在网络中部署若干已知自身位置的信标,而后其他节点,即未知节点通过测量到信标的距离、角度等信息进行定位。无信标的方法利用节点间的相互关系,各节点以自身为参考点建立相对坐标。使用基于信标比无信标的方法能得到更高的定位精度,而且信标越多,定位精度越高,但是信标比未知节点的成本要高很多。使用移动信标进行定位既能达到基于固定信标定位方法的精度,又可降低网络成本和能耗,成为当前的研究热点。一般而言,移动信标辅助定位方法包含如下阶段。
1) 信标沿着一定的路径遍历整个网络部署区域,并同时广播数据分组。将每个广播消息的信标位置称为虚拟信标。
2) 未知节点接收虚拟信标信息,并存储在一个虚拟信标信息表中。
3) 未知节点利用所记录的信息估算位置。
一个未知节点至少需要接收到 3个非共线(二维)或者4个非共面(三维)虚拟信标信息,才可实现定位,因此使用一个移动信标的定位方法需要信标多次经过一个未知节点。本文提出一种多个移动信标辅助的定位方法,同一时刻可产生多个虚拟信标,那么每个未知节点便可实现一次性定位。
2 相关工作
使用移动信标进行定位的最简单方法就是在信标移动过程中,随机停留在某些位置并放置一个普通的传感器节点,或者直接将移动信标位置作为离它最近的未知节点的位置,再把这些节点看作固定信标,辅助其他节点的定位。如移动信标辅助的DV-Hop定位方法[3]利用移动信标产生固定信标,接着用DV-Hop方法实现定位。这种方法需要进行迭代计算,误差较大,而且转换为固定信标的节点能量消耗较快。因此,绝大多数的移动信标辅助定位方法利用移动信标产生虚拟信标,以辅助未知节点定位。
与使用固定信标的定位方法相同,移动信标辅助定位方法可分为基于测距和无需测距的定位方法。基于测距的方法需测量未知节点与虚拟信标之间的距离。Zhang等[4]提出使用 TDoA(time difference of arrival)测距,而后使用三边测量法估算位置的方法。Zhong 等[5]提出根据声波能量与传播距离的关系及来自不同虚拟信标的能量来估算未知节点的位置,并采用中垂线策略、速度调整策略和虚拟排斥力策略提高定位性能。根据节点之间的邻接关系,MBL(ndc)(mobile beacon-assisted localization algorithm based on network-density clustering)算法[6]首先对未知节点进行分簇,在每个簇内获得各个未知节点相对坐标,接着利用移动信标对簇头节点进行定位,而后便可定位其他节点。Kim等[7]还给出了采用加权最小二乘法提高使用移动信标时测距精度的方法。
无需测距的定位方法可以用(加权)质心算法计算位置。如 MACL(mobile anchor centroid localization)算法[8]中,未知节点取所接收到的虚拟信标的位置平均值为自己的位置,陈娟等[9]则使用加权质心算法。ADO(arrival and departure overlap)算法[10]利用未知节点进入和离开移动信标通信范围的交叉部分构成ADO区域,再求取HADO(half ADO)的质心作为未知节点的位置。Lee等[11]选择3个虚拟信标,使用其中2个构建交叉区域,再用第3个计算未知节点位置。MBB(mobile bounding box)算法[12]使用正方形近似表示信标通信区域,对网络进行网格划分后,信标沿网格顶点移动,未知节点利用接收的虚拟信标的位置平均值作为位置估计值。RROI(radiate region of intersection)算法[13]需移动信标带有定向天线,以多个虚拟信标波束交叉区域的质心作为未知节点的估计位置。史清江等[14]使用多功率移动信标为每个未知节点构造不等式约束,再使用凸规划算法求解位置,Chen等[15]给出了在有障碍物的场景中使用该方法时的改进措施。
利用移动信标也可确定多条通过未知节点的直线,取它们的交点作为估计位置。PI(perpendicular intersection)算法[16]要求信标沿三角形移动,将 2条边上具有最大RSS(received signal strength)值的点看作未知节点在边上的投影点,取通过这2个点的垂线交点为未知节点的位置。MAP(mobile anchor positioning)算法[17]以最初进入和最后离开的虚拟信标通信区域的交点作为2个候选位置,再使用已定位邻居节点或其他虚拟信标确定可行位置。使用携带定向天线的移动信标,未知节点可选择最初进入和最后离开的虚拟信标的2个边界线交点[13],或2个最大RSS值对应的定向波束的中线交点作为估计位置[18]。Ou等[19]提出的方法需要携带定向天线的信标沿直线运动,未知节点维护一个按照接收时间排列的虚拟信标列表,取居中的虚拟信标作为自己的位置。
上述算法都是确定性的,也有学者提出了概率性算法。Caballero等[20]提出了在三维室外环境下基于测距的粒子滤波定位方法。MBL[21]算法使用分布式的概率算法给出未知节点可能位于的区域及该估计的可能性。A-MBL(adapting MBL)[21]算法在MBL算法的基础上调整估计过程中抽样集合的规模和动态模型的参数,SA-MBL(self-adapting MBL)[22]算法在保证A-MBL算法精度的前提下,给出了判断达到定位稳定状态的方法,从而提高了算法的灵活性。Huang等[23]提出由信标使用蒙特卡罗抽样方法来估算未知节点位置。
使用多个移动信标可提高定位性能。虚拟尺[24]方法将2个信标置于长度固定的车辆上,移动期间测量未知节点对之间的距离,然后使用集中或分布式算法计算未知节点位置,该方法需要移动信标定向发射超声波信号,适用于室内场景。张正勇等[25]将9个移动信标构成一个圆形,未知节点通过比较来自不同信标的RSS值确定可行区域,并取该区域的质心作为其估计位置。Patro等[26]使用 4个移动信标在未知节点周围构成一个正方形,未知节点取正方形的质心作为位置估计值。由于正三角形可完整覆盖一个平面,Zhang等[27]使用由3个信标构成的GMAN(group of mobile anchor nodes)遍历网络部署区域,未知节点根据RSS求出自己所在的3条直线,取其交点为自身位置估计值。该方法需选择来自不同信标的相同RSS值,而RSS受各种环境因素影响较大,部分未知节点可能无法接收到来自不同信标的相同RSS。这些方法都没有探讨移动信标的路径规划问题。
本文针对室外二维传感器网络,提出基于TDoA测距的3个移动信标辅助的定位方法,以实现高精度定位;探讨了信标移动路径规划方法,以覆盖整个网络部署区域。在下文中,假定s是一个未知节点,且估计位置为 (,),真实位置为(xs,ys);信标Bi(i=1, 2, 3)的坐标为Bi(xi, yi),且传输范围是半径为R的圆。
3 3个移动信标辅助的定位方法
3.1 信标的位置关系
3个信标可以在一条直线上,也可构成一个三角形。如果3个信标在一条直线上(如图1(a)所示),那么即使未知节点同时接收到3个信标的信息,也不能实现定位;如果3个信标构成边长大于R的三角形(如图1(b)所示),那么它们的交叉区域会很小,每个时刻可定位的未知节点个数就会很少;如果 3个信标构成边长小于 R的三角形(图 1(c)),信标两两之间会产生较大的信号干扰。因此将3个信标排列成边长为R的等边三角形(如图2所示),这也是文献[27]所使用的位置关系。

图1 3个信标之间的位置关系
如图2示,设3个信标按顺时针序排列,它们的通信区域有6个交点,其中,3个交点即3个信标,另3个记为A1、A2和A3。显然,位于ΔB1B2B3内的未知节点可同时接收到来自3个信标的信息而实现定位。如果未知节点只能接收到2个信标发送的消息,则必位于ΔB1B2A1、ΔB1B3A3和ΔB3B2A2之一的内部,也可实现定位。因此,只要一个未知节点能够接收到至少2个信标同一时刻发送的信息,便可实现定位。
信标在遍历网络部署区域时保持相对位置不变,并同时发送数据分组。

图2 3个信标形成等边三角形
3.2 定位方法
RSS是一种常用的测距方法,实现简单,成本低,但实际环境中的温度、多径效应等使其精确度较差,可能产生最大50%的测距误差[28]。TDoA测距技术通常使用超声波/声波和射频信号之间的速度差测距,精度高,但是受限于LOS(line of sight),且超声波/声波的传播距离有限。考虑到移动信标通常携带GPS(global positioning system)以获取绝对坐标,而GPS也可实现精确测距时,本文使用另一种TDoA技术进行测距。如图3所示,发射节点在时刻t1发射速度为v的射频信号,接收节点在t2时刻接收到信息后,立即回复一个射频信号,发射节点在时刻t3接收到回复信号,可计算出两者之间的距离d为


图3 TDoA测距示意
这种方法在不增加网络中普通传感器节点成本的前提下,可实现较高精度的测距。
设di(i=1,2,3)是s与Bi之间的距离,即

那么,若s测得了到具有相同时间戳的3个虚拟信标的距离,可使用三边测量法进行定位。若 s仅测得2个具有相同时间戳的虚拟信标的距离,如图4所示,设s测得到B1、B2的距离分别为d1、d2,但未收到同一时刻来自B3的信号,求解式(3)得到2个对称的位置s和s',由于s必位于ΔB1B2A1内,所以可排除s',实现唯一定位。


图4 s的2种可能位置
最后,取所有时刻计算出的估计位置的平均值作为s的最终估计位置。
算法 1给出了该算法的过程。Beacons()是 3个信标执行的过程,第7行的条件“finish”有2种可能:一是为定位过程预设的运行时间消耗完;二是信标已经遍历完整个网络部署区域。UnknownNode(s)是未知节点s要执行的过程,变量distList用于记录所有的虚拟信标数据分组,第8行的条件“finish receiving packets”也有2种可能:一是按照某种规则 s进入了休眠期,二是信标已经完成了遍历,第23行的变量lfinal就是未知节点的估计位置。
设3个信标实现了时钟同步,且广播测距消息的t1时刻是相同的,并以t1作为发送距离信息给s时的时间戳。
算法1 多移动信标辅助定位算法
输入:信标Bi(i=1,2,3)的初始坐标、移动路径
输出:网络中未知节点的坐标


4 信标移动路径
信标移动路径是决定一跳内可定位节点数目、定位精度等性能的重要因素,一个好的移动路径应尽可能精确地定位可能多的节点[29],还应尽量缩短移动路径以降低成本[30]。假设网络部署区域是一个(W×L)的矩形,且W和L可分别被 3R和R整除,本文采用如下几种路径。
4.1 RWP模型
RWP(random waypoint)模型最早用于在移动通信系统中模拟用户的移动过程。在移动信标辅助定位算法中,也可用于模拟信标移动过程[11,21,22,24]。其规则是:从网络部署区域内的任意一个位置开始,随机选择区域内的一个点作为目标位置,并随机选择[vmin,vmax]内的一个速度,而后按照此速度从起始位置移动到目标位置,在移动过程中周期性地发送数据分组。
为使 3个信标在移动过程中保持相对位置不变,假定信标B1负责选择目标位置和移动速度,而B2和B3根据B1选择的值以及相对于B1的位置进行移动。
4.2 Scan路径
如图 5(a)示,Scan路径[10,14,27,29]由多段平行直线组成。为使网络中的每个未知节点至少被ΔB1B2B3覆盖一次,将区域的左右边界分别扩展=/2l R 。设信标的移动速度为 v,如图 6(a)所示,当v>R时,阴影部分的未知节点将无法实现定位。如图6(b)所示,当Scan路径中相邻2条平行直线的间距(称为Scan路径的分辨率)时,上下相邻直线之间没有空隙。因此,取 v≤R且,可定位部署区域内的所有节点。


图5 3种移动路径
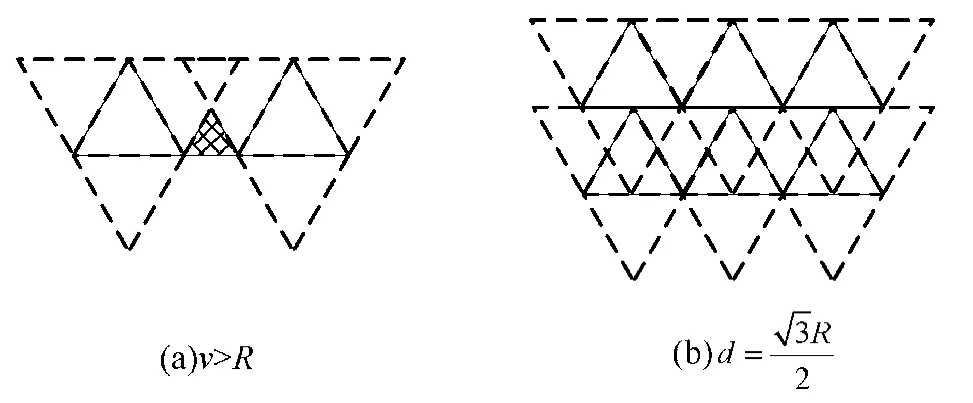
图6 移动路径的覆盖情况
4.3 STC和LTC路径
李石坚等[30]指出,三重覆盖可保证网络部署区域的任意位置都可接收到至少3个信标信号,并使用等距三重优化覆盖研究了单个移动信标辅助定位时的最佳路径问题。由于等距三重优化覆盖中,各位置点构成等边三角形,而本文提出的算法中的3个移动信标恰好也构成一个等边三角形,从而可设计出最佳路径。
若形成等距三重优化覆盖的三角形是ΔB1B2B3(图 5(b)所示),称此时的移动信标路径为STC(small triangle coverage)。若形成等距三重优化覆盖的三角形是ΔA1A2A3(图 5(c)所示),称此时的移动信标路径为 LTC(large triangle coverage)。图 5(c)中实心圆代表 B1、B2、B3位置,而空心圆表示A1、A2、A3位置。
如图7(a)示,为使3个信标在STC路径中保持正三角形,从最左侧上ΔB1B2B3开始,B1移动到对称于线段 B2B3的位置,形成下ΔB3B2B1;接着,B2移动到对称于线段 B1B3的位置,形成上ΔB3B1B2;随后,B3移动到对称于线段 B1B2的位置,形成下ΔB2B1B3;这样 B1、B2、B3不断逐个轮流移动,便可实现STC路径。可见,在该路径的2个相邻三角形间,一个信标关于公共边对称,需移动 3R的距离,另2个信标不移动。每段平行于x轴的路径由个ΔB1B2B3组成,共段,所以其路径长度为

如图 7(b)所示,为实现 LTC路径,从最左侧下ΔB2B1B3开始,B3和B1轮流水平移动,B2轮流沿斜率为1和-1的直线向上和向下移动。因此在2个相邻ΔA1A2A3间,B2移动距离为 3R,B1与B3移动距离之和为 2R。每段平行于 x轴的路径由个ΔA1A2A3组成,共段,所以其路径长度为


图7 相邻三角形位置变换
STC和LTC路径的长度均与R无关,仅取决于W和L,而且STC路径比LTC更短。
5 性能评价
本节将本文提出的算法(简记为TMBL)与使用单个移动信标的三边测量法(简记为TRI)、文献[25]的方法(简记为 NINE)、文献[26]的方法(简记为FOUR)和文献[27]的算法(简记为GMAN)进行对比,以分析其性能。移动信标辅助定位方法应以尽可能短的信标移动路径、尽可能高的精度定位尽可能多的未知节点,因此从以下3方面分析算法的性能。
1) 可定位节点数。指在信标一跳范围内可被定位的未知节点数量,反映了移动信标路径的覆盖情况。
2) 定位误差。仅对可定位节点的误差进行分析,定位误差定义为[14]

其中,N是可定位节点的个数。
3) 信标移动路径长度。指所有移动信标在定位期间移动路径的总长度。
采用MATLAB 7.0对上述各种算法进行仿真实验。设定网络部署区域是(173×100)m2的矩形区域,有200个未知节点均匀分布于区域内。移动信标的传输半径是各向对称的,即其通信范围是一个圆形。设信标通信半径R=5m、10m、20m和25m,分别考察不同R下的定位性能。假设TMBL与TRI均采用 3.2节中所提出的测距方法,测距误差是10%。未知节点s与第i个虚拟信标之间的测量距离 ˆsid 服从均值为真实距离dsi、标准差为0.1dsi的正态分布。GMAN和NINE所使用的RSS采用不考虑任何干扰的理想模型。
对于RWP模型,取vmin=1m/s,vmax=Rm/s,信标每隔 1s广播一次数据分组,运行时间分别取1~10min各10种情况。对于Scan路径,取信标移动速度v=0.5Rm/s,分辨率,每隔1s广播一次数据分组。所有定位结果均取5次运行结果的平均值进行比较。
5.1 RWP模型
因为文献[27]的GMAN算法需采用Scan路径,所以这里比较另外4种方法。
RWP模型通常无法覆盖整个网络部署区域[24],部分未知节点无法接收到信标信息,所以4种方法都无法定位全部未知节点。4种方法的可定位节点数如图8所示。随着运行时间和R的增加,4种算法的可定位节点数均增加。在R和运行时间相同情况下,TMBL和NINE最多,FOUR次之,TRI的可定位节点数最少。在R=25m,运行 10min后,TMBL可定位98.7%的节点,NINE可定位96.2%的节点,而FOUR和TRI分别可定位77%和32.7%的节点。
4种算法的平均定位误差如表1所示,TRI的误差最大,FOUR和NINE次之,TMBL的误差最小。不同的R值下,TMBL的平均定位误差都在6%左右,约为FOUR和NINE的31%、TRI的12%。
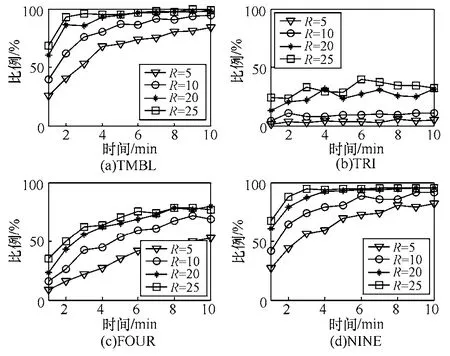
图8 RWP模型下的可定位节点数

表1 RWP模型下的平均定位误差/%
5.2 Scan路径
TMBL使用给定参数的 Scan路径可定位全部节点,但另外4种算法无法定位全部节点(见表2),可见这些算法不能覆盖全部的网络部署区域。

表2 Scan路径下的可定位节点数
表3给出了采用Scan路径时的平均定位误差,其中GMAN的误差最大,TRI、FOUR和NINE的次之,TMBL的误差最小。此外,TMBL算法在Scan路径下的定位误差略小于RWP模型下的误差。

表3 Scan路径下的平均定位误差/%
5.3 STC和LTC路径
移动信标只有在到达新位置后才发送数据分组。这2种路径仅适用于TMBL算法,可定位全部未知节点。2种路径下的平均定位误差如表4所示,由于LTC使用ΔA1A2A3作为扫描三角形,其面积要大于ΔB1B2B3,所以其误差要比STC大。

表4 STC和LTC路径的平均定位误差/%
5.4 路径长度
在W和L一定的情况下,使用同一种路径时,信标路径总长度与信标个数成正比。
RWP的路径长度与 R无关,但随着运行时间的增加而接近线性增长(如图9所示),当运行10min时,3个信标移动超过21 000m的距离;随着信标个数增加,信标路径总长度随之增长。

图9 RWP路径长度
如图10所示,Scan路径长度是关于变量R的减函数,当R=5m时,3个信标移动距离约为37 500m,当R=25m时,其距离约为8 500m。在R相同的情况下,路径长度与信标个数成正比。

图10 Scan路径长度
在给定的W和L取值下,STC与LTC的路径长度是一个常数,分别约为865m和892m,LTC比STC约长0.26Lm。
综上,TMBL算法在各种路径下的平均定位误差最小,而且TMBL算法在STC路径下的平均定位误差小于RWP模型、Scan路径和LTC路径下的定位误差。同时,STC路径的长度最短。因此采用STC路径的TMBL算法具有最佳性能。
6 结束语
移动信标辅助定位方法使用移动信标在遍历网络部署区域过程中产生的虚拟信标代替固定信标,保证了定位精度,同时降低了定位成本。本文提出了一种基于3个移动信标和TDoA测距技术在二维环境下的定位算法,并给出了4种移动路径规划方法。实验表明,在使用同一移动路径时,本文所给出的方法比使用单一移动信标的三边测量法以及文献[25,26,27]提出的方法具有更好的性能。根据等距三重最优覆盖策略设计的STC路径可以覆盖整个网络部署区域,其长度仅与区域大小有关,长度最短,而且使用该路径与使用 Scan路径的定位精度大致相同,高于使用LTC路径的定位精度。
下一步,将着重研究使用多个移动信标在三维场景以及非理想(如存在障碍物、非理想传输范围)情况下的定位问题。
[1] LIU Y,YANG Z,WANG X,et al. Location, localization, and localizability[J].Journal of Computer Science and Technology, 2010,25(2): 274-297.
[2] WANG J, GHOSH R, DAS S. A survey on sensor localization[J].Journal of Control Theory and Applications, 2010, 8(1): 2-11.
[3] 姚忠孝, 俞立, 董齐芬.基于移动信标的 DV-Hop无线传感器网络定位算法[J]. 传感技术学报,2009,22(10):1504-1509.YAO Z X, YU L, DONG Q F. Beacon-based DV-hop localization algorithm in wireless sensor networks[J]. Chinese Journal of Sensors and Actuators, 2009,22(10): 1504-1509.
[4] ZHANG B, YU F. An energy efficient localization algorithm for wireless sensor networks using a mobile anchor node[A]. Proceedings of IEEE International Conference on Information and Automation[C].Changsha, China, 2008.215-219.
[5] ZHONG Z,LUO D, LIU S,et al. An adaptive localization approach for wireless sensor networks based on gauss-markov mobility model[J].Acta Automatica Sinica,2010, 36(11): 1557-1568.
[6] 赵方, 马严, 罗海勇等. 一种基于网络密度分簇的移动信标辅助定位方法[J]. 电子与信息学报, 2009, 31(12): 2988-2992.ZHAO F, MA Y, LUO H Y, et al. A mobile beacon-assisted node localization algorithm using network-density-based clustering for wireless sensor networks[J]. Journal of Electronics and Information Technology, 2009, 31(12): 2988-2992.
[7] KIM E, KIM K. Distance estimation with weighted least squares for mobile beacon-based localization in wireless sensor networks[J]. IEEE Signal Processing Letters,2010, 17(6): 559-562.
[8] HU Z,GU D, SONG Z, et al. Localization in wireless sensor networks using a mobile anchor node[A]. Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics[C].Xi'An, China, 2008.602- 607.
[9] 陈娟, 李长庚, 宁新鲜. 基于移动信标的无线传感器网络节点定位[J]. 传感技术学报,2009,22(1):121-125.CHEN J, LI C, NINIG X. Node Localization of wireless sensor networks based on mobile beacon[J]. Chinese Journal of Sensors and Actuators, 2009, 22(1):121-125.
[10] XIAO B,CHEN H,ZHOU S. Distributed localization using a moving beacon in wireless sensor networks[J]. IEEE Transactions on Parallel and Distributed Systems, 2008,19(5): 587-600.
[11] LEE S,KIM E,KIM C,et al.Localization with a mobile beacon based on geometric constraints in wireless sensor networks[J].IEEE Transactions on Wireless Communications, 2009,8(12):5801-5905.
[12] 石为人, 许磊, 徐扬生. 一种基于移动锚节点的静态无线传感器网络定位算法[J].仪器仪表学报,2007,28(3):385-393.SHI W R, XU L, XU Y S. Localization algorithm with mobile anchor in static wireless sensor network[J]. Chinese Journal of Scientific Instrument, 2007,28(3):385-393.
[13] ZHANG B, YU F. LSWD: localization scheme for wireless sensor networks using directional antenna[J]. IEEE Transactions on Comsumer Electronics, 2010, 56(4): 2208- 2216.
[14] 史清江, 何晨. 多功率移动锚节点辅助的分布式节点定位方法[J].通信学报, 2009,30(10):8-13.SHI Q J, HE C. Multi-power level mobile beacon assisted distributed node localization algorithm[J]. Journal on Communications, 2009,30(10): 8-13.
[15] CHEN H, SHI Q, TAN R, et al.Mobile element assisted cooperative localization for wireless sensor networks with obstacles[J].IEEE Transactions on Wireless Communications, 2010, 9(3): 956-963.
[16] GUO Z, GUO Y, HONG F, et al.Perpendicular intersection: locating wireless sensors with mobile beacon[J]. IEEE Transactions on Vehicular Technology,2010,59(7): 3501- 3509.
[17] LIAO H, LEE C, KEDIA S P. Mobile anchor positioning for wireless sensor networks[J]. IET Communications,2011, 5(7): 914-921.
[18] ZHANG B, YU F. Low-complex energy-efficient localisation algorithm for wireless sensor networks using directional antenna[J].IET Communications,2010, 13(4): 1617-1623.
[19] OU C H. A localization scheme for wireless sensor networks using mobile anchors with directional antennas[J]. IEEE Sensor Journal,2011, 11(7):1607-1616.
[20] CABALLERO F, MERINO L, MAZA I, et al.A particle filtering method for wireless sensor network localization with an aerial robot beacon[A]. Proceedings of IEEE International Conference on Robotics and Automation[C]. Pasadena, USA, 2008. 596-601.
[21] TENG G,ZHENG K,DONG W.Adapting mobile beacon-assisted localization in wireless sensor networks[J]. Sensors, 2009,9(4):2760-2779.
[22] TENG G,ZHENG K,DONG W. An efficient and self-adapting localization in static wireless sensor networks[J]. Sensors, 2009,9(8):6150-6170.
[23] HUANG R,ZARUBA G.V.Monte carlo localization of wireless sensor networks with a single mobile beacon[J]. Wireless Networks, 2009,15(8): 978-990.
[24] DING Y,WANG C,XIAO L.Using mobile beacons to locate sensors in obstructed environments[J]. Journal of Parallel and Distributed Computing, 2010,70(6):644-656.
[25] 张正勇, 孙智, 王刚等. .基于移动锚节点的无线传感器网络节点定位[J]. 清华大学学报(自然科学版), 2007,47(4):534- 537.ZHANG Z Y, SUN Z, WANG G, et al. Localization in wireless sensor networks with mobile anchor nodes[J]. Journal of Tsinghua University(Sci & Tech), 2007,47(4):534- 537.
[26] PATRO R K. Localization in wireless sensor network with mobile beacons[A].Proceedings of 23rd IEEE Convention of Electrical and Electronics Engineers in Israel[C]. Eliat, Israel, 2004. 22-24.
[27] ZHANG B, YU F, ZHANG Z. Collaborative localization algorithm for wireless sensor networks using mobile anchors[A].Proceedings of 2nd Asia-Pacific Conference on Computational Intelligence and Industrial Applications[C]. Wuhan, China,2009.309-312.
[28] 孙利民, 李建中, 陈渝等. 无线传感器网络[M]. 北京: 清华大学出版社, 2008.SUN L M, LI J Z, CHEN Y, et al. Wireless Sensor Networks[M].Beijing: Tsinghua University Press, 2008.
[29] KOUTSONIKOLAS D, DAS S M, HU Y C. Path planning of mobile landmarks for localization in wireless sensor networks[J]. Computer Communications, 2007, 30(13): 2577-2592.
[30] 李石坚,徐从富,杨旸等.面向传感器节点定位的移动信标路径获取[J]. 软件学报,2008,19(2):455-467.LI S J, XU C F, YANG Y, et al. Getting mobile beacon path for sensor localization[J]. Journal of Software,2008, 19(2):455- 467.
