面向操作的装备虚拟训练系统机理建模方法
2012-07-25贾晨星朱元昌邸彦强
贾晨星,朱元昌,邸彦强
(军械工程学院 光学与电子工程系,河北 石家庄050003)
0 引 言
新型军械装备面临着训练成本高,受空间、气候、人员保障等因素制约等问题,基于实装的传统方法难以满足教学训练的要求[1]。在应用需求和支撑技术的推动下,能实现装备 “全任务”[2]训练的装备虚拟训练系统 (EVTS)[3]成为新一代教学训练模式。
装备虚拟训练系统为使用户感觉到 “真实感”,需要解决两个 “像不像”的问题:①虚拟装备与实装的外观 “像不像”;②能否像操作实装那样操作虚拟装备,即工作原理“像不像”。机理模型[4]是对装备工作特性和行为的相似描述,是解决第二个问题的关键。基于视景仿真、虚拟现实和人机交互等技术的虚拟训练系统[5-7]虽然可以使用户体会到身临其境的沉浸感,但若脱离了机理模型,再真实的虚拟装备都是孤寂的,没有生命的。可见,机理模型是装备虚拟训练系统的重要组成,不可或缺。
现有装备虚拟训练系统中存在机理模型与外观模型边界不明确,紧密耦合的问题。另外,国内对装备操作虚拟训练的机理建模方法的研究[8-9],大多针对具体仿真任务,只停留在应用技术层面,缺乏深入的理论研究。本文对装备仿真模型结构进行了分析,介绍了一种面向操作的装备机理建模方法及其实现工具。
1 装备仿真模型结构
仿真依据的是相似性原理[10]。根据相似性原理,装备仿真模型的表现可分为几何相似和数学相似。几何相似指形状、比例的相似,如飞机模型;数学相似根据数学表达式内涵可进一步划分为特征相似和逻辑相似。前者是对象特征数据方程或参数含义的相似,后者是对获取的信息进行分析、归纳、综合、判定、决策直至操作控制方式的相似。因此从特征上,我们可以将装备仿真模型分为外观模型和机理模型,如图1所示。外观模型是装备视觉特征的直接映射,机理模型是对装备动力、机械、电气等方面工作原理的近似描述[11]。

图1 紧耦合式仿真模型结构
如图1所示,虚拟训练系统将训练人员的动作采集、信息解释、数据处理,以及虚拟装备的响应、显示等,这样一个流程集中在一个模型里完成,造成机理模型与外观模型的紧密耦合,给两类模型的维护、扩展和重用带来极大的不便。松耦合式仿真模型结构如图2所示,外观模型中只包含虚拟装备的基本动作行为,机理模型则控制装备内各部件间的工作逻辑和部件响应。两类模型通过消息机制[12-13]相互作用。外观模型将采集到的操作转化为消息,传递给机理模型。机理模型在数据处理后返回仿真数据,驱动外观模型。
这种外观模型与机理模型独立开发的模式,降低了模型开发的难度。开发人员可以根据装备仿真任务的不同,在外观模型一定的情况下可实现多种机理控制,对外观模型和机理模型实现了重用。
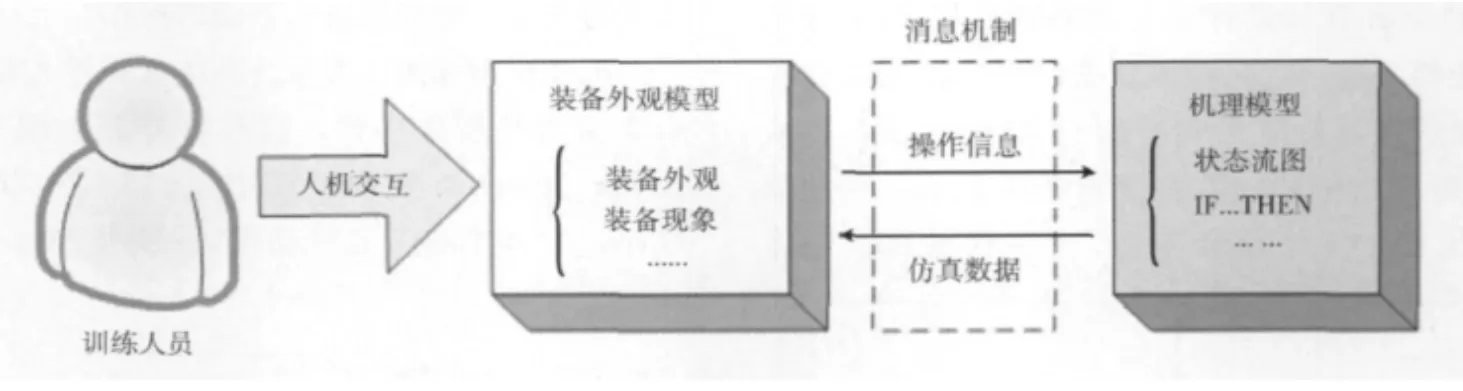
图2 松耦合式仿真模型结构
2 面向操作的装备机理建模
2.1 面向操作的装备虚拟训练概述
面向操作的装备虚拟训练,也叫装备操作虚拟训练,是指以培训装备使用者掌握装备操作流程为仿真任务的虚拟操作仿真。虚拟操作仿真是实际操作过程在虚拟环境下的再现或预演,将真实反映与描述装备、操作人员和维修、检测工具之间所发生的各种行为和经历的各种状态。装备操作过程实际上是 “人-虚拟装备-工具/设备”三者之间发生交互作用的过程,其中人是主体,虚拟装备和工具是客体。作为主体,人将支配和驱动虚拟装备部件与检测、维修工具的运动。虚拟装备和工具作为客体,对人的行为具有一定的约束,亦即人的行为必须服从于装备结构、装配特点以及工具使用特点所产生的客观约束条件。
不论是装备的战斗操作还是检测维修操作,都具有过程逻辑性。所谓过程逻辑性,是指装备的使用操作严格遵守先后顺序,错误操作将导致装备损坏。为延长装备的使用寿命,发挥最佳的作战效能,操作过程是固定的。这种固定的操作过程就是对主体的客观约束条件,也是虚拟操作训练的研究重点。面向操作的机理建模的目的就是根据相似性原理,建立装备操作过程的抽象表述。
2.2 面向操作的机理建模方法
在装备固定的操作过程中,每进行一步操作,装备的工作状态都会发生变化。因此,对应操作步骤集合,可将装备的工作过程划分为可数的工作状态,把操作事件作为引起工作状态改变的原因。
随着不同操作事件的发生,装备工作状态间断的发生变化,呈现出离散事件动态特性;另一方面,装备内部的一些状态变量,表现为随着时间变化而连续变化,体现出连续时间动态系统特征。由此可见,装备的工作状态表现为离散控制与系统连续运行的相互作用,即具有混杂性。
状态图 (Statecharts)[14-15]是 David Harel于 1987年 提出的一种可视化建模语言,针对传统有限状态机的不足,增加了层次、并发、广播通讯等概念,适用于大型复杂装备系统的动态操作过程建模。本文基于状态图理论,采用将系统连续变量的描述嵌入到描述离散事件的符号系统中的思想,提出了一种针对混杂系统的可视化建模方法,本质在于描述装备操作过程中不同工作状态下可进行的操作。
机理模型中包含4个建模元素 〈S,L,T,J〉:S是最基本的建模单元——工作状态;L是工作状态迁移标签;T是工作状态迁移;J是工作状态节点,包括分支节点和历史节点。
工作状态S包括 〈q,x,f,Inv,as,λ,φ〉7个元素。q和x分别代表工作状态中的离散变量和连续变量;f是工作状态中连续变量的演化规则;Inv是工作状态中连续变量的不变集。当系统处于某个工作状态Si,若其连续变量xi保持在相应的不变集Inv(Si)内部,即xi∈Inv(Si)时,连续变量xi按照相应演化规则fi进行演化。如果连续变量超出不变集Inv(Si),则将发生工作状态迁移;as是工作状态内部的动作,包括进入动作Entry、保持动作During、退出动作Exit;λ是层次函数,定义状态及其子状态的关系;φ是工作状态的类型,分别为 {BASIC,OR,AND}。若某工作状态Si中有子状态,即λ(Si)≠Φ,且状态类型φ(Si)=OR,则当系统进入状态Si时,它仅能处于Si的某一个子状态。若λ(Si)≠Φ且φ(Si)=AND,则当系统进入状态Si时,它同时处于Si的每一个子状态。若λ(Si)=Φ,则φ(Si)=BASIC。
状态迁移标签L用于标明引起工作状态迁移的操作事件e、使能条件c和迁移动作at。状态迁移T用于标示工作状态间的迁移方向,它包括源状态、目标状态和标签三元素 (注:源状态和标签可为空缺)。如图3所示,从“工作状态A”到 “工作状态B”的状态迁移TA-B,它的源状态是 “工作状态A”,目标状态是 “工作状态B”。迁移标签为E[C]/A,表示当系统处于 “工作状态A”时发生事件E,若满足使能条件C,则状态迁移,同时有迁移动作A。

图3 状态迁移
考虑到装备系统机理模型复杂,在此仅以某型高炮武器系统的几个操作步骤为例,对上述建模方法进行讲解。
训练科目的操作流程:①车长打开总电源,总电源指示灯亮;②驾驶员脚踩油门或者手拉油门操纵杆,使发动机转速达到1800r/min以上;③车长打开电站开关;④炮手打开火控开关,同时车长打开炮塔开关。两个操作为异步并行关系,完成后进入下面的操作。
机理模型如图4所示。系统首先进入初始化状态 (initial)并等待操作事件。当有打开总电源开关事件 (open power switch)发生,工作状态迁移至驾驶员状态(driver),并伴随有迁移动作——总电源灯亮 (light1on)。

图4 机理模型
工作状态Driver的类型为OR,包含3个互斥子状态。进入工作状态Driver后,首先处于默认初始子状态PowerOn。当脚踩油门操作事件 (step accelerator pedal)发生,且满足 “总电源开 (power on)”使能条件时,状态迁移至子状态SubState1。当处于子状态SubState1时,有保持动作 (During)油门加速指示灯亮 (light2on)。手拉油门操作杆事件 (pull accelerator pole)的响应原理与其类似,不再赘述。应当注意的是,两个操作事件是互斥事件,即当其中一个事件发生后,状态迁移至对应的目的状态,另一个事件在之后将不能产生状态迁移。
不论系统处于状态Driver的任何一个子状态,如果发生关闭总电源事件 (close power switch),系统将退出状态Driver并迁移至初始化状态 (Initial)。当系统因为打开电源开关事件 (OpenPowerSwitch)再次进入工作状态Driver时,通过状态中的历史节点H,系统直接进入之前退出状态Driver时的活动子状态。
发动机转速Speed是状态Driver的连续变量,有不变集Inv(State2)=[0,1800)。当发动机转速高于1800r/min时,系统状态迁移至State1。当发生打开电站开关事件 (open PowerStation switch)后,系统迁移至工作状态Parallel Operation。
工作状态Parallel Operation的类型为AND,包含两个并行的子状态ArtillerMan和Conductor。系统状态迁移至状态Parallel Operation后,两个子状态中的默认初始状态Wait_1和Wait_2被激活,等待各自的迁移事件的发生。打开火控开关事件 (open fire control switch)和打开炮塔开关事件 (open artillery turret switch)互为并行事件,发生先后互不影响。当两个事件均已发生,则满足下一迁移的使能条件 [Fire Ready &Turret Ready],系统状态从Parallel Operation迁移至后续的工作状态。
2.3 实现方法
面向操作的装备机理模型虽然可以详尽的表述装备的工作原理,但是为了进一步对装备系统仿真,需要将此图形化模型转换为能够被计算机所识别的形式。
Matlab/Stateflow作为Statecharts的一个建模工具,已经得到了学术界广泛的认可。Stateflow中的状态 (State)对应工作状态S,每个状态中同样包含3种动作 (entry,during,exit)。转移 (Transition)和默认转移 (Default Transition)对应状态迁移T,历史节点 (history junction)和连接节点 (connective junction)对应工作状态节点J。Stateflow中的转移标签 (transition label)由4部分组成,分别为事件 (event)、条件 (condition)、条件动作 (condition action)和转移动作 (transition action)[16]。
用Stateflow对图4模型进行转化,建立如图5所示的仿真模型。这个仿真模型既可以在Matlab/Simulink中进行可视化仿真,也可以通过Stateflow Coder将其转化为计算机程序代码,如C、C++等。
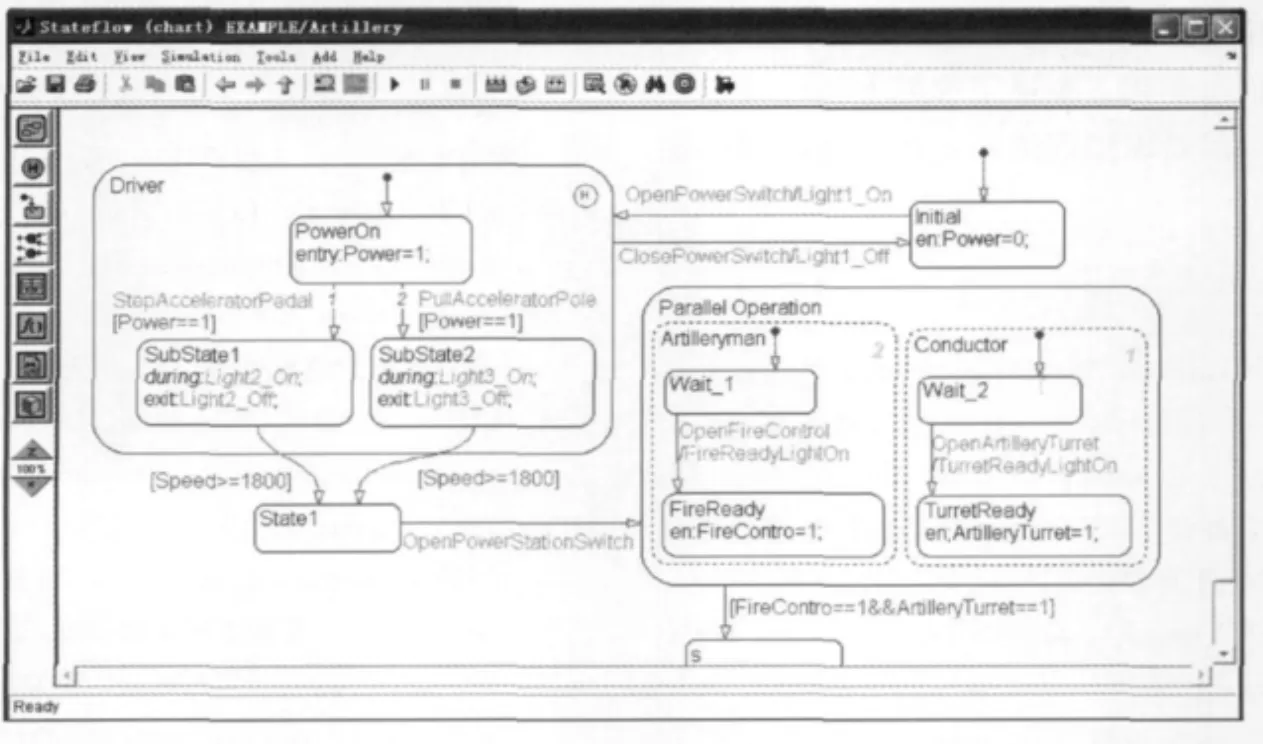
图5 Stateflow仿真模型
3 应用验证
“某型高炮虚拟操作训练系统”采用上述面向操作机理建模方法,并结合目前先进的虚拟现实技术和分布交互式仿真技术构建了一个具有沉浸感的,支持多人协同训练的桌面式虚拟训练系统。受训者通过鼠标、键盘和操纵杆等人机交互设备,在虚拟训练系统中进行战斗操作和故障检测维修等训练科目,掌握基本理论,熟练操作程序,累积操作经验,大大缩短了训练时间、提高了训练质量和效益。
系统的开发基于当前主流虚拟现实软件Virtools和三维建模软件3DMAX,并采取了机理模型与外观模型独立开发的设计思想。外观模型中只包含虚拟部件的基本动作行为,如指示灯的亮灭,车门的开关动作等。机理模型负责控制虚拟装备的操作过程和装备外观模型的响应。如图6所示,整个系统用一个完备的机理模型,部署在独立的节点上,由同一个机理模型完成对外观模型的控制。机理模型与外观模型的之间的消息交互通过中间件HLA/RTI完成。虚拟训练系统运行画面如图7所示。

图6 机理模型与外观模型分布交互
4 结束语
本文提出的机理模型与外观模型独立开发的设计思想,解决了既有装备虚拟训练系统中机理模型与外观模型紧密耦合的现象,降低了系统开发的难度,实现了模型的重用。面向操作的装备机理建模方法基于图形化、层次化的建模形式,具备标准的语义、语法,可以完备的描述大型混杂系统的动态操作过程,实现了 “一张图顶百句话”的效果。基于该机理建模方法开发的 “某型高炮虚拟训练系统”,已推广至军事院校教学训练使用,验证了建模方法的可行性和实用性。希望本文可以对虚拟训练系统的发展起到一定的促进作用。

图7 某高炮虚拟训练系统仿真画面
[1]TAN Jishuai,HAO Jianping,WANG Songshan.A summary of equipment virtual training system’s research and development[J].Ordnance Industry Automation,2007,26 (5):6-7 (in Chinese).[谭继帅,郝建平,王松山.装备虚拟维修训练研究与发展综述 [J].兵工自动化,2007,26 (5):6-7.]
[2]ZHU Yuanchang,DI Yanqiang,QUAN Houde,et al.Simulation training system of general radar equipment and key technology [J].Journal of System Simulation,2005,17 (11):2633-2637(in Chinese).[朱元昌,邸彦强,全厚德,等.通用雷达装备模拟训练系统及其关键技术研究 [J].系统仿真学报,2005,17 (11):2633-2637.]
[3]ZHAO Jingcheng.Design and practice of virtual simulation training system [M].Beijing:National Defense Industry Press,2008:19-20(in Chinese).[赵经成.虚拟仿真训练系统设计与实践 [M].北京:国防工业出版社,2008:19-20.]
[4]WANG Xingren,WEN Chuanyuan,LI Bohu,et al.Development of china’s system model and simulation technology [J].Journal of System Simulation,2009,21 (21):6683-6688 (in Chinese).[王行仁,文传源,李伯虎,等.我国系统建模与仿真技术的发展 [J].系统仿真学报,2009,21 (21):6683-6688.]
[5]LI Dan,YANG Sixin,YANG Yuhang.Helicopter maintenance training simulation system [J].Computer Engineering and Design,2009,30 (5):1212-1215 (in Chinese). [李丹,杨四新,杨宇航.直升机维修训练仿真系统 [J].计算机工程与设计,2009,30 (5):1212-1215.]
[6]WANG Shuxin,YU Shilin,NING Haiqiang,et al.Development of the simulated training system for main power equipment used in warships [J].Ship & Ocean Engineering,2008,37(4):28-30 (in Chinese).[王术新,余世林,宁海强,等.船艇主动力装备模拟训练系统的开发与研制 [J].船海工程,2008,37 (4):28-30.]
[7]HE Jiawu,LAI Yukun.Development of weapon equipment virtual maintenance training system [J].Science of Technology,2010,28 (24):71-74 (in Chinese). [何嘉武,赖煜坤.武器装备虚拟维修系统设计与实现 [J].科技导报,2010,28(24):71-74.]
[8]LIU Yaozhou,LIU Yanhong,ZHAO Hongwu.Application of operation response model in virtual operation training system [J].Computer Engineering,2006,32 (3):267-269 (in Chinese). [刘耀周,刘延宏,赵宏武.操作响应模型在虚拟操作训练系统中的应用 [J].计算机工程,2006,32 (3):267-269.]
[9]ZHU Luofeng,SUN Youzhao.Research and realization on operating response model of virtual maintenance training system[J].Aircraft Design,2009,29 (1):75-80 (in Chinese).[朱罗锋,孙有朝.虚拟维修训练系统VMTS操作响应模型研究与实现 [J].飞机设计,2009,29 (1):75-80.]
[10]GUO Qisheng,DONG Zhiming,LI Liang,et al.System modeling and simulation [M].Beijing:National Defense Industry Press,2007(in Chinese).[郭齐胜,董志明,李亮,等.系统建模与仿真 [M].北京:国防工业出版社,2007.]
[11]LIU Ying,ZHU Yuanchang,DI Yanqiang.Complex equipment modeling method for virtual training system [J].Journal of Ordnance Engineering College,2008,20 (3):4-7 (in Chinese).[刘颖,朱元昌,邸彦强,等.虚拟训练系统复杂装备建模方法研究 [J].军械工程学院学报,2008,20 (3):4-7.]
[12]PENG Hong,ZHAO Xibin,YONG Jianping,et al.Heterogeneous system integration solution based on message mechanism [J].Application Research of Computers,2005,22(8):43-46 (in Chinese).[彭竑,赵曦滨,雍建平,等.基于消息机制的异构系统集成方案 [J].计算机应用研究,2005,22 (8):43-46.]
[13]FAN Mingliang,ZHANG Lina.Design and application of the workflow simulation modeling based on message driving mechanism [J].Computer Development & Applications,2011,24 (1):60-62 (in Chinese). [范明亮,张丽娜.基于消息驱动机制的工作流仿真模型的设计与应用 [J].电脑开发与应用,2011,24 (1):60-62.]
[14]Eshuis,Rik.Reconciling statecharts semantics [J].Science of Computer Programming,2009,74 (3):65-99.
[15]Sekerinski,Emil.Verifying statecharts with state Invariants [C].United State:Proceeding of the IEEE International Conference on Engineering of Complex Computer Systems,2008:7-14.
[16]ZHANG Wei.Stateflow:Logical system modeling [M].Xi’an:Publisher of Xi’an University of Electronic and Technology,2007:24-25 (in Chinese). [张威.Stateflow逻辑系统建模[M].西安:西安电子科技大学出版社,2007:24-25.]
