基于结构特征的视网膜血管形态识别
2012-07-25赵晓芳林土胜
赵晓芳,林土胜
(1.华南理工大学 电子与信息学院,广东 广州510641;2.东莞理工学院 电子工程学院,广东 东莞523808)
0 引 言
视网膜血管形态结构因人而异,没有重复性。因其位于眼球内部,不受外界因素的影响,所以与其它人体生物特征的鉴别能力相比具有更高的保密性和防伪能力,可以作为生物特征进行个人身份识别[1]。
目前提出的各种视网膜血管图像自动识别方法包括基于图像匹配[2-3]和基于节点匹配的方法[4-5]。文献 [2]把整个视网膜血管树结构作为匹配的特征,故需要存储和处理整个血管树结构,导致模板信息存储量和匹配计算量过大。文献 [3]利用视网膜血管图像的整体灰度信息和视盘周围的统计特征来进行身份识别,而忽略了血管的结构信息,因此识别效果并不十分令人满意,此外视盘的定位本身是一个难题。借鉴指纹识别的方法,血管网络的节点 (视网膜血管树的分叉点和交叉点)被提取出来作为特征点进行一对一的比对,但只要其中一幅图像发生移位或者旋转等方位变动,就很可能造成匹配失败,故一般需要在节点匹配之前对待匹配的两个特征点集进行结构对准操作[4-5]。文献 [6-7]在进行指纹匹配时利用特征点的相似三角形来判断匹配原点对,并根据匹配原点对计算两个特征点集间的旋转和平移参数,进而进行点集校准和匹配。对于节点个数比较多的视网膜血管图像,该方法计算量比较大,且鲁棒性不强。
针对以上问题,基于节点和节点之间的相互位置关系是固定不变的这一事实,提出一种节点最近邻三角形来提取视网膜血管结构匹配特征的方法。试验证明,该方法对图像的旋转和平移有较强的鲁棒性且计算量比较小,取得了较好的识别效果。
1 视网膜血管节点检测
有关眼底视网膜血管的研究,大多集中在血管分割这一部分,且取得了比较好的分割效果[8-10]。在视网膜血管二值分割的基础上,采用形态学的细化算子进行骨架提取,细化即保持原始形状的拓扑结构和连通性,同时把血管宽度缩减到单像素的宽度,有利于节点的检测。分析已有的视网膜血管网络节点提取方法,可以发现大部分方法是通过扫描整幅细化后的二值图像的目标像素的连接数,如果连接数为3或者4即为节点,该方法对噪声和血管宽度的轻微波动比较敏感,并且检测的节点中有较多的虚假节点需要剔除[11]。
通过观察分析,在视网膜血管图像中,如图1(a)所示,分叉点和交叉点的位置以及血管弯曲部分的弯曲度都会有较大的变化,故可以采用角点检测的方法来检测视网膜血管图像的节点。Han和Poston提出了一种基于累加点到弦长的距离 (chord-to-point distance accumulation,CPDA)的角点检测方法,该方法不需要进行导数计算,也不涉及高斯平滑尺度难以选择的问题,与基于曲率尺度空间(curvature scale space,CSS)的方法相比鲁棒性更强[12-13]。本文对视网膜血管骨架图像利用CPDA方法来计算离散曲线的曲率,找出局部曲率最大的位置来确定节点,检测到的节点叠加到骨架图像上,如图1(b)所示。图1(c)给出了原始灰度旋转90°后进行节点检测的结果。
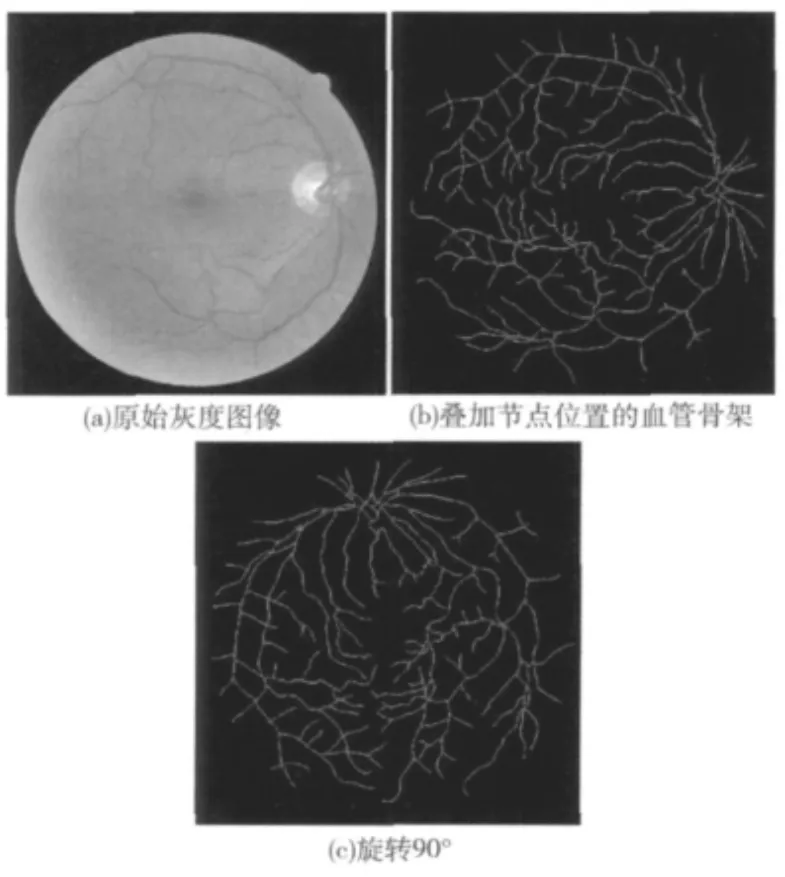
图1 节点提取
2 视网膜血管节点特征提取
视网膜血管图像的比对就是通过对存有图像特征量的数组集合来进行比较的。假如两幅血管图像可以完全匹配起来,则可以通过对输入的血管图像 (待测图像)作某种变换 (平移、旋转与缩放)得到模板中的血管图像。在视网膜血管识别中,匹配特征提取方法优劣的评价标准之一就是所提取的特征变量是否具有图像缩放不变性、旋转不变性和平移不变性[14]。文中的算法针对同一分辨率下的血管图像处理,即图像采集过程中被测试者在同一广角下,盯视同一盏固视灯,故可忽略图像缩放的影响。
2.1 节点结构特征提取
不管在视网膜血管图像拍摄过程中眼球做何种转动,节点之间的相对位置关系不会改变,如图1(b)和1(c)所示的节点相对位置关系。三角形是最稳定的一种结构,两个三角形的两条边及其夹角对应相等则这两个三角形是全等三角形。从这个角度出发,对任一个节点可通过计算与其最近邻的节点的距离作为该节点的匹配特征。节点结构特征提取的主要步骤如下:
对任意的一个节点Po,寻找其最邻近的3个节点,依次为O1、O2和O3,Po到这三点的距离分别为d1、d2和d3,如图2所示。Po与最近邻的两个点O1和O2组成的三角形为△O1PoO2,记∠O1PoO2为θ0,则

式中:d12——O1和O2之间的距离,则节点Po的结构特征为最近邻两点做成的三角形参量和d3组成的节点结构特征向量,记做 [θ0,d1,d2,d3],可以证明该向量为平移和旋转不变量。
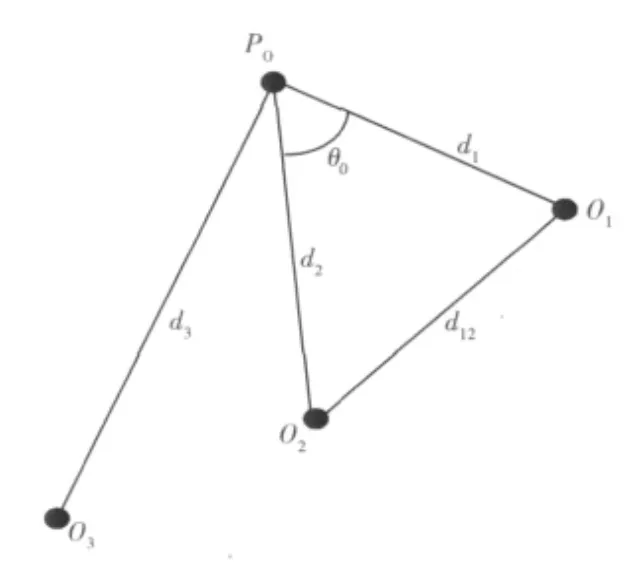
图2 节点结构特征提取
(1)平移不变性。设视网膜血管图像在原始图像中水平方向平移距离为Δx,垂直方向平移距离为Δy,则原始图像中的坐标点Po(x0,y0)、O1(x1,y1)、O2(x2,y2)和O3(x3,y3),平移后各点的坐标变为:P′o(x0+Δx,y0+Δy)、O′1(x1+Δx,y1+Δy)、O′2(x2+Δx,y2+Δy)和O′3(x3+Δx,y3+Δy)。
则图像特征向量变为

可以看出视网膜血管图像特征向量d1具有平移不变性,同理可以得到d2、d3和d12具有不变性,根据式 (1)可知θ0也具有平移不变性。
(2)旋转不变性。设视网膜图像在原始图像中旋转角度为Δψ,由于做任何的旋转都可以转化为以图像中逻辑坐标原点为轴心的旋转,设原始图像中的坐标点为原始图像的坐标点为Po(r0cosψ,r0sinψ)、O1(r1cosψ,r1sinψ)、O2(r2cosψ,r2sinψ)和O3(r3cosψ,r3sinψ),旋转 Δψ角度后各 点 的 坐 标 变 为:P′o(r0cos(ψ+Δψ),r0sin(ψ+Δψ))、O′1(r1cos(ψ+Δψ),r1sin(ψ+Δψ))、O′2(r2cos(ψ+Δψ),r2sin(ψ+Δψ))和O′3(r3cos(ψ+Δψ),r3sin(ψ+Δψ))。
则图像的特征向量变为

可以看出视网膜血管图像特征向量d1具有旋转不变性,同理可以得到d2、d3和d12具有不变性,根据式 (1)可知θ0也具有旋转不变性。
2.2 匹配算法的描述
设P和Q为任意两个视网膜血管图像的节点结构特征点集,按照2.1节所述的方法提取这两幅图像上的所有节点结构特征,分别记做

首先Q中的某一节点qj能否在P中找到对应的点,通过以下步骤完成:
(1)进行宽松匹配,把比较的范围限定在一个小的范围内,可以加快寻找对应点的速度。即在P寻找能够满足|θpiθqj|<б的节点ppθ,其中pθ= {pi|i∈ {1,2,...,m}}。
(2)对ppθ内的点进行紧致匹配操作。计算Dpi=,r∈pθ,若-Dpi<η,则qj在P中找到了对应的点,反之,qj在P中没有对应点。
然后对Q中的所有节点特征重复以上过程,统计Q在P中对应点的个数,记做C。如果直接采用点对点的匹配,Q中任意一个节点都要与P中所有节点进行匹配,共进行mn次匹配;这里通过宽松匹配,把Q中的每个节点的匹配范围限制在了一个小的范围R内,设Q中的节点经过宽松匹配被限制最大范围内的节点的个数为u,且u<m,需要总的匹配次数设为number,则number<un<mn。随着匹配点数的增大,采用宽松匹配和紧致匹配相结合的方法使匹配次数减少的效果越明显。
如果仅使用C作为两幅图片是否匹配的标尺,往往会造成错误匹配。如果两幅图像Q和P为不同个体的节点特征点集,当n比较大而m比较小,则得到的C较大,往往会误判为同一个体。同样,当同一个体的两幅图像的节点比较少了,会造成C较小,结果会误判为不同的个体的视网膜血管图像。故任意两个视网膜血管图像特征点集P和Q之间相似度距离S定义为[5]

式中:C——P和Q中相匹配的特征点个数,λ——控制因子。
3 试验结果
为验证文中所提算法的有效性,在主频为2.1GHz、内存为1GB的双核PC机上采用 Matlab7.0平台对算法进行仿真。采用DRIVE数据库[9],库中40幅图像是使用Canon CR5免散瞳眼底照相机,在45°广角下拍摄的大小为584×565×3的彩色图像,这里将提取对比度强的绿色通道灰度图像作为研究对象。
取视网膜血管灰度图像样本A1,经过逆时针旋转5°变换得到图像A2,逆时针旋转90°得到图像A3,做小样本试验,用作相同个体的视网膜血管图像形态识别。同理增加图像样本B1、C1和D1,进行不同个体人眼识别比较。
表1给出了样本A1与其它样本之间的相似度距离以及对应样本的节点数。其中,样本A1对应的节点个数为119个。
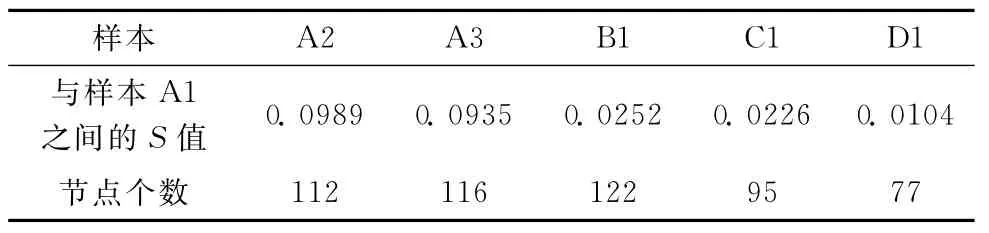
表1 样本之间的相似度距离与样本的节点数
从上述研究数据可以看出,对相同个体A1与A2、A3之间的相似度距离S比较大;而A1与其它图像之间匹配属于不同个体之间的比较,其对应的相似度距离S较小。表明了匹配和失配的分界比较明显。在实际应用中,可以通过一定数量的统计试验来确定具体应用中的具体阈值界限。
增加样本的数目来验证文中算法,分别对40个人的眼底视网膜血管图像分别进行顺时针5°、10°的旋转和逆时针5°、10°旋转,为了测试大幅度旋转,再对原始图像顺时针旋转90°、180°和270°,旋转产生7组共280幅灰度图像。对整个320幅视网膜灰度图像,40个人 (每人8幅),分别进行了类内两两匹配和类间两两匹配的实验,共进行的匹配次数为51040次,其中类内匹配 (又称合法匹配)为1120次,类间匹配 (又称非法匹配)为49920次匹配。
设两幅待比较的图像为A和B,要检验图像A中的特征点是否在B中存在匹配点,称为正向匹配。反之,要检验图像B中的特征点是否在A中存在匹配点,称为逆向匹配。为了验证算法对模板样本和测试样本的不敏感性,即可逆性,分别进行正向和逆向的类间匹配和类内匹配实验,正向和逆向匹配的距离分布曲线如图3所示。
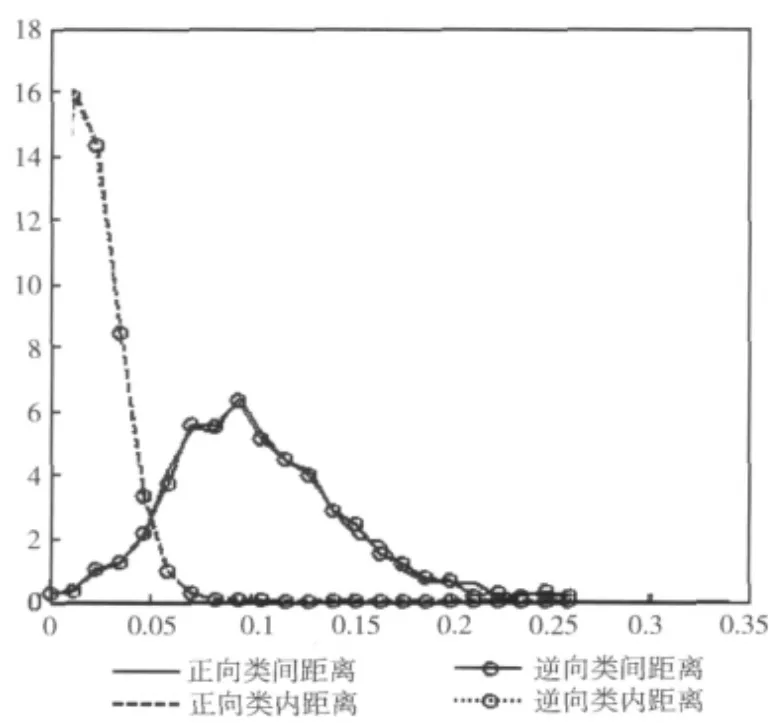
图3 类间和类内距离的比较
从图3可以看出,类内匹配和类间匹配距离分布线分得比较开,且交叉面积较小,这表明选取的特征向量在特征向量空间中类间相似度较小,类内相似度大,可以用作匹配特征。并且正向匹配和逆向匹配结果相差不大,即对匹配的模板样本与测试样本的选择不敏感。
为了检验算法的鉴别性能和准确度,采用错误接受率(false acceptance rate,FAR)和错误拒绝率 (false rejection rate,FRR)为标准,定义如下[15]

FRR是指系统拒绝真正的生物特征拥有者而造成的错误率;FAR是指系统将冒充者误认为生物特征拥有者的错误率。对于理想的系统来说,这两个错误率都应该是零。但在实际中,这两个指标是相关的,当FRR比较低时,FAR就会比较高,反之亦然。根据不同的应用场合,系统往往需要在FRR和FAR之间取一个折衷。在现有的技术水平下,无法使FRR和FAR同时达到最小,需要调整匹配阈值来满足不同应用的要求。
给定不同的阈值T可以计算出不同FAR和FRR,两者是一种此消彼长的关系,通过选取合适的阈值,可以得到最大的识别率。接受者操作特征 (receiver operating characteristic,ROC)曲线是FAR与FRR之间的对应曲线,很好地反映FRR和FAR之间的关系,曲线上的点表示不同情况下所有可能的系统操作状态,它反映了整个系统的匹配性能。越接近横坐标轴和纵坐标轴,说明系统性能越好。图4给出了正向匹配下的ROC曲线,试验结果表明该方法取得了较好的结果。

图4 ROC曲线
在识别模式下,算法的性能是通过正确识别率来衡量的,即用正确识别的样本数与总体样本数的比值来进行评价的。通过以上分析可知,两个图像不管做正向匹配还是逆向匹配,其相似度相差不大。不失一般性,选取原始图像作为模板图像,选取顺时针和逆时针旋转5°和10°的四组数据作为待识别图像,宽松匹配门限δ取8、紧致匹配门限η取2.5、控制因子λ取0.9时得到的识别率为99.38%。在固视灯的引导下,每次采集的图像旋转和平移度在一定的范围内,这里10°范围内的旋转得到了较高的识别率,满足实际应用的需要。加入旋转90°、180°和270°的样本组,共7组测试样本,280幅图像,得到的总体识别率达到了98.57%,说明文中算法对大幅度的旋转也具有较好的适应性。与文献 [2]存储整个视网膜血管树结构作为匹配的特征相比,本文所提算法需要存储的信息较少,对于大规模的身份识别优势更加突出。与文献 [3]采用统计特征作为匹配特征利用60幅图像作为测试得到的正确率为94.5%相比,本文所提采用结构特征最为匹配特征得到的识别率更高。
4 结束语
提出了一种利用节点最邻近的结构信息进行视网膜血管识别的方法。该方法对每个节点寻找离该节点最近邻的3个节点进行分步匹配,以该节点与最近的两个相邻节点连线的夹角为宽松匹配特征,以与3个最近节点的距离为紧致匹配特征。提取的特征变量具有平移不变性和旋转不变性,因此在图像获取过程中,眼球的微小转动不会影响节点结构特征变量和识别结果。有关眼底识别技术主要还停留在理论研究阶段,面向实际应用有所尝试但是还不成熟。眼底图像采集设备的小型化、大众化、用户人机友好交互化是实现眼底识别技术迈向实际应用的重要保证。
[1]Kakarwal S N,Deshmukh R R.Analysis of retina recognition by correlation and covariance matrix [C].Proceedings of Third International Conference on Emerging Trends in Engineering and Technology,2010:496-499.
[2]Mari o C,Penedo M G,Penas M,et al.Personal authentication using digital retinal images [J].Pattern Analysis and Applications,2006,9 (1):21-33.
[3]Rahman N A,Mohamed A S,Rasmy M E.Retinal identification [C].Proceedings of International Biomedical Engineering Conference,2008.
[4]Latha1L,Pabitha M,Thangasamy S.A novel method for person authentication using retinal images[C].Proceedings of International Conference on Innovative Computing Technologies,2010:1-6.
[5]Ortega M,Penedo M G,Rouco J,et al.Retinal verification using a feature points-based biometric pattern [J].EURASIP Journal on Advances in Signal Processing-Special Issue on Recent Advances in Biometric Systems:A Signal Processing Perspective,2009.
[6]WANG W,LI J W,CHEN W M.Fingerprint minutiae matching based on coordinate system bank and global optimum alignment[C].Proceedings of 18th International Conference on Pattern Recognition,2006:401-404.
[7]LI H Y.Identification and registration of shape for blood vessel of eyeground[D].Changchun:Jilin University M A,2006:48-60(in Chinese). [李海英.眼底血管的识别和对比研究[D].长春:吉林大学硕士学位论文,2006:48-60.]
[8]Cinsdikici M G,Aydin D.Detection of blood vessels in ophthalmoscopeimages using MF/ant (matched filter/ant colony)algorithm[J].Comput Methods Programs Biomed,2009,96 (5):85-95.
[9]Staal J,van Ginneken B,Viergever M A.Automatic rib segmentation and labeling in computed tomography scans using a general framework for detection,recognition and segmentation of objects in volumetric data [J].Medical Image Analysis,2007,11 (1):35-46.
[10]DU X J,Bui T D.Retinal image segmentation based on mumford-shah model and gabor wavelet filter [C].Proceedings of 20th International Conference on Pattern Recognition,2010:3384-3387.
[11]Mari o C,Penedo M G,Penas M,et al.Personal authentication using digital retinal images [J].Pattern Analysis and Applications,2006,9 (1):21-33.
[12]Awrangjeb M,LU G J.Robust image corner detection based on the chord-to-point distance accumulation technique [J].IEEE Transactions on Multimedia,2008,10 (6):1059-1072.
[13]ZHANG X,LEI M,YANG D,et al.Multi-scale curvature product for robust image corner detection in curvature scale space[J].Pattern Recognition Letters,2007,28 (5):545-554.
[14]SHUAI X,ZHANG C,HAO P.Fingerprint indexing based on composite set of reduced SIFT features[C].Proceedings of 18th International Conference Pattern Recognition,2008:1-4.
[15]Akobeng A K.Understanding diagnostic tests 3:Receiver operating characteristic curves [J].ActaPaediatr,2007,96(5):644-647.
