基于Atmega16的太阳能智能小车
2012-07-04林少帅赵齐齐郭志波
林少帅 谢 勇 赵齐齐 郭志波
(扬州大学信息工程学院 江苏 扬州 225127)
0 引言
地球资源的日益贫乏,基础能源的投资成本日益攀高,太阳能作为一种“取之不尽、用之不竭”的绿色新能源越来越受到重视。太阳能智能电动小车是一种环保型代步工具,它利用光伏效应,通过太阳能电池把太阳光转化为电能,存储在高能蓄电池中,并利用该电能驱动行驶车辆。本文基于AVR智能控制芯片对小车进行充放电的智能检测控制,并对小车的行驶做出智能控制。
1 太阳能小车总体系统结构

图1 系统框图
太阳能智能小车系统框图如图1所示,由太阳能电池板、蓄电池、充电电路、驱动和电机构成的动力系统组成,而由单片机、红外传感器及遥控器构成控制系统。
当光伏电池电压值大于蓄电池电压值时,控制器利用太阳能给蓄电池进行充电,同时给负载供电。在充电的同时,系统对太阳能阵列、蓄电池、负载进行监控和管理,对蓄电池采取了防过充保护措施。当光伏电池电压值较低时,充电电路不工作,由蓄电池直接给负载供电。当蓄电池电压值较低时,蓄电池本身带有防过放的功能,能够切断负载电路,防止蓄电池过放。红外遥控器发射遥控码,通过红外一体管接收遥控码,经过程序识别,可以控制小车做前进、后退、左拐、右拐以及智能避障等动作。
2 系统硬件设计
2.1 小车底盘
小车在行驶的过程中,需要加载太阳能电池板,并且根据红外避障传感器避开障碍物,所以小车要有较强的电机扭矩,并且需要坚固的车身,要求车身材料易于钻孔,方便安装单片机最小系统、电动机驱动电路模块以及红外避障传感器等单元模块。根据这些要求,决定选用有机玻璃作车身,采用铝合金电机固定座,后轮采用双电机驱动模式,选择金属齿轮大扭矩减速电机作驱动电机,前轮采用万向轮支撑,其中金属齿轮大扭矩减速电机的扭力6kg*cm,额定转速是150r/min,额定电压是6V,额定电流为500mA。这样小车的负重能力可以达到5kg,足以载动太阳能电池板等硬件模块。
2.2 单片机最小系统
单片机最小系统采用AVR单片机中的Atmega16,其最小系统包括复位电路、ISP接口、JTAG接口、PA~PD四个端口全部引出,支持JTAG仿真。其中PA~PD四个端口全部引出,便于应用或连接外围设备,在进行实验时只需要使用排线和外围设备连接即可。预留有ISP接口,可以使用相应的ISP下载线向Atmega16L芯片中写入程序。
2.3 电机驱动模块
电机驱动芯片采用L298N双H桥直流电机驱动芯片,驱动电路如图2所示。L298N是SGS公司的产品,内部包含4通道逻辑驱动电路,是一种两相和四相电机的专用驱动器,即内涵两个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。
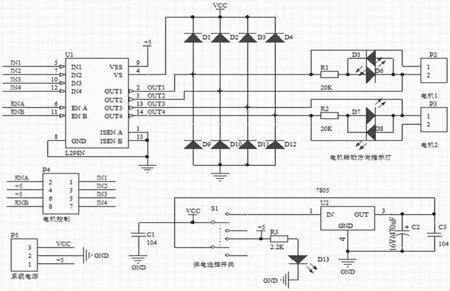
图2 电机驱动电路图
图2中,OUT1、OUT2和OUT3、OUT4之间分别接两个电动机。IN1、IN2、IN3、IN4引脚从单片机接输入控制电平,控制电机的正反转,ENA、ENB接控制使能端,控制电机的停转。电机采用PWM调速的方法,其原理是开关管在一个周期内的导通时间为t,周期为T,则电机两端的平均电压U=Vcc*(t/T)=αVcc。其中α为占空比,Vcc是电源电压。电机的转速与电机两端的电压成比例关系,而电机两端的电压与控制波形的占空比成正比,因此电机的转速与占空比成比例,占空比越大电机转得越快。 另外采用7085稳压芯片稳定输出一个+5v的直流电压,供单片机使用。
2.4 远距离红外避障模块
为了使小车能够实现自动避障功能,我们在小车的车前安装了三个红外避障传感器,该传感器的检测距离为2-80cm,可以通过模块上的电位器调节检测距离。传感器检测到有障碍物时,输出TTL低电平信号,无障碍物时输出高电平信号。单片机可以根据输出信号做出相应判断。另外模块上附有使能端,低电平有效,可以根据需要选择要检测的传感器。
2.5 红外遥控装置
红外遥控的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同几种遥控码互相干扰。后16位为8位操作码及其反码。这种遥控码采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、周期为2.25ms的组合表示二进制的“1”。当发射器按键按下后,即有遥控码发出,所按的键不同遥控码也不同。遥控码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码,高8位地址码,8位数据码和这8位数据码的反码组成。通过一体化红外接收器接收遥控器发射出来的红外脉冲波,然后由程序识别是否有按键按下以及按下的是那个键,然后根据程序对按键的定义,对不同按键做出相应的反应。
2.6 充电电路设计

图3 充电电路模块
由于太阳能电池板输出电压不稳定且输出电压比蓄电池高的多。故需降压电路得到稳定且比蓄电池电压稍高的电压给蓄电池充电。充电主电路采用BUCK变换器,由UC3845、TL431构成闭环控制,同时使用光耦合隔离技术保证控制电路与功率电路安全隔离,最终达到输出稳定的电压。本设计装置还具有过流、过压保护功能,当过压或过流时通过反馈使UC3845的6脚输出波形的占空比减小,从而达到过流过压保护作用。随着充电的进行,蓄电池两端电压不断升高,为防止电池过充,用单片机检测蓄电池两端电压。当蓄电池两端电压过高时,port1输出为高电平,由于光耦作用,IC3的第3端为高电平,可使D2的阴极电位大于1V,即UC3845的3脚大于1V,封锁UC3845的6脚输出,此时即停止对蓄电池的充电。

图4 程序设计框图
3 系统软件设计
根据系统要求,程序设计框图如图4所示。
本系统采用Atmega16做控制芯片,其内部带有模数转换模块,可以方便对充电电压进行检测,从而实现过充保护。另外两个电机的转速控制是通过PWM调压实现的,而Atmega16的定时器有相位修正的PWM功能,可以在相应的定时中断中修改占空比,从而控制电机转速。实验通过红外遥控,进而对小车进行运动控制,其中有五个可调用函数,分别是前进函数、后退函数、左拐函数、右拐函数以及自动避障函数,红外遥控实现对调用函数的选择。在阳光充足情况下可实现不间断行驶,电路工作稳定可靠,有很好的应用前景。
[1]王兆安,刘进军.电力电子技术[M].5 版.机械工业出版社.
[2]路秋生.常用充电器电路与应用[M].机械工业出版社.
[3]海涛.Atmega系列单片机原理及应用[M].机械工业出版社.
[4]沈辉,曾祖勤.太阳能光伏发电技术[M].化学工业出版社.
