基于改进粒子群算法的船舶排样问题研究
2012-06-30杜浩楠黄泽峰黄泰安
杜浩楠,黄泽峰,袁 雁,黄泰安
(1.江苏科技大学南徐学院,江苏 镇江 212003;2.江苏科技大学计算机科学与工程学院,江苏 镇江 212003)
0 引言
在船舶行业逐渐萧条的形势下,最大限度的降低生产成本是提高船厂效益的有力途径。造船材料占据了生产成本的很大部分,因此提高船舶板材的利用率是关键。然而,船舶零件多为不规则形状,给计算机自动排样程序的实现增加了困难。一些学者就通过矩形包络的方法,将不规则图形排样转化为矩形件排样,这样更利于问题的解决。矩形件排样问题在理论上属于具有最高复杂性的NP完全问题,随着矩形零件的增多,很难用传统算法得到最优解。因此,不管是从理论研究还是从实际应用上讲,对二维矩形件排样问题的研究都具有重要的意义。
粒子群优化算法[1](Particle Swarm Optimization,简称PSO)是由Kennedy和 Eberhart首先提出的一种全局随机搜索算法。它模拟鸟群觅食过程中的迁徙和群聚行为,利用群体智能搜索出较好的解。该算法有着收敛速度快、设置参数少、算法简单易实现等优点,所以一经提出就受到了学术界的广泛重视,并被广泛应用于函数优化、模式分类、模糊系统控制、神经网络训练以及其他工程领域中[2,3]。因此近年来许多国内外学者研究粒子群算法,并提出了很多改进的算法[4~8]。
要使矩形件优化排样获得更好的效果,可考虑从2方面入手:一是用更好的方法确定矩形件排放的先后顺序和排放方式,二是设计出更好的矩形件排放算法[9]。国内外不少学者已经做了很多研究工作,提出了一些近似算法和启发式算法[10~13]。本文从第一方面入手,应用改进的粒子群算法——蛙跳简化粒子群算法进行矩形件优化排样。排样实例表明了该方法的有效性。
1 剩余矩形法简介
对于矩形件排样问题,常见的启发式算法有左底算法(BL算法)、左底填充算法(BLF算法)、下台阶法、最低水平线法、剩余矩形法[14,15]。本文是将改进的粒子群算法同剩余矩形法相结合用于排样问题,剩余矩形法可做如下阐述:
参照图1,宽W、高H的矩形(0,0,W,H)。一个矩形件i(宽wi、高hi)加入后,原来的大矩形减去加入矩形件的位置。设矩形件的左下角坐标为(xi,yi),则大矩形减掉与矩形件(xi,yi,xi+wi,yi+hi)相交的部分后,得到的4个新的矩形:(0,0,xi,H)、(0,0,W,yi)、(0,yi+hi,W,H)、(xi+wi,0,W,H)。相邻矩形件的重叠部分如何处理将在后文中给出。
剩余矩形法包含剩余矩形集、待排矩形集、已排矩形集等3个矩形集。剩余矩形集包含任何没有被排样的空间,待排矩形集和已排矩形集分别包含待排、已排的矩形件信息。剩余矩形法可作如下描述:
(1)初始时,剩余矩形集为母板(0,0,W,H)。
(2)当1个矩形件排入时,3个集都要进行更新。待排矩形集要删除代表该矩形件的结点。在剩余矩形集中找到一个能放下该矩形件的最小剩余矩形,将该矩形件放置在此剩余矩形的左下角(满足BL条件),删除此剩余矩形,得到了2个新的剩余矩形R1和R2,如图2所示。对于R1和R2的重合部分(图中虚线部分),将在第3步进行调整。对于已排矩形集,则记录排入矩形的位置。

图1 剩余矩形法示意图
(3)更新剩余矩形集。新的剩余矩形的产生会引起剩余矩形集发生变化,这时就要对剩余矩形集作如下调整:对于有完全包含关系的剩余矩形,删除被包含的矩形,仅保留较大面积矩形;对于有相交关系的剩余矩形,全部保留;对于与已排入矩形有相交关系的剩余矩形,全部删除;对于面积为零或已放不下剩下任一矩形的剩余矩形,全部删除。按此规则更新的剩余矩形集用于下一次排样。
(4)重复第2、第3步,直至所有矩形排完,即待排矩形集为零,输出板材利用率。
从上面的描述可以看出,剩余矩形法既满足BL条件又符合BLF算法的思想,这样就能够对排样过程中产生的空白间隙进行填充,保证了板材较高的利用率,有利于找到较优解。
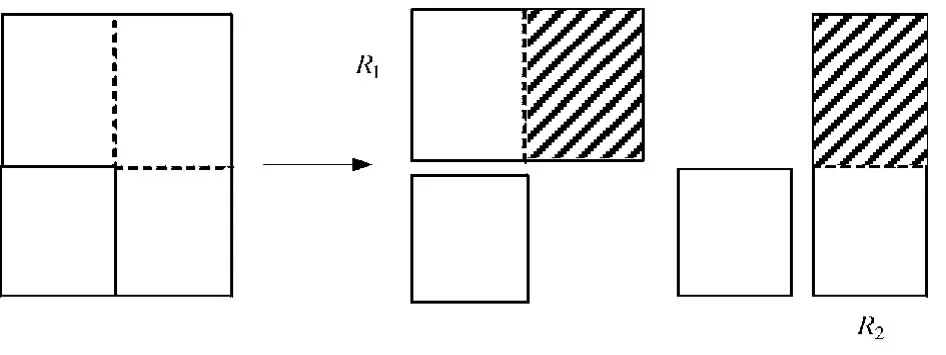
图2 剩余矩形法切割示意图
2 粒子群算法的改进
蛙跳简化粒子群算法(SFLA-SPSO)就是将混合蛙跳算法的分组思想引入到文献[8]给出的简化粒子群算法中。由于多了一个分组操作,将原来简化的粒子群算法的位置更新公式改写如下:

式中:x(t)、x(t+1)分别表示粒子当前位置和迭代后的位置。符号右边的第1项为“历史”部分,表示过去对现在的影响,通过惯性因子w来调节影响程度;第2项为“认知”部分,表示粒子对自身的思考,c1为自身学习因子,Pbest表示粒子自身最优位置;第3项为“社会”部分,表示粒子与组内最优粒子gbest的比较和模仿,c2为组内学习因子;第4项为“超社会”部分,表示粒子与总的粒子群体最优粒子g′best的比较和模仿,c3为全局学习因子;r1、r2、r3均为[0,1]之间的随机数,由计算机分别随机生成。这样粒子就获得了更为丰富的信息来更新自身位置,局部信息和全局信息能够得到充分利用,粒子间的信息共享和合作也更加充分。
蛙跳简化粒子群算法的具体流程如下:
Step 1选定粒子群规模(m组,每组n个粒子),对粒子群的初始位置进行初始化;
Step 2计算每个粒子的适应度;将粒子按照适应度函数值由小到大的顺序进行排序,得到全局最优值;
Step 3对粒子进行分组,第 i组粒子为{xi,xm+i,x2m+i,…,x(j-1)m+i},i∈[1,m],j∈[1,n];
Step 4对于每个粒子,将其适应度与所经历过的最好位置的适应度进行比较,如果更好,则将其作为粒子的个体历史最优值,用当前位置更新个体历史最好位置pbest;
Step 5选出组内最优位置gbest,对于第i组粒子,有gbest=xi;
Step 6每个小组中n个粒子按照公式(1)更新自身位置,迭代完成后对每个粒子按适应度由小到大的顺序进行排序,排序后的粒子进入下一次组内迭代,转到Step 5;
Step 7达到组内迭代次数后,各组更新后的粒子进入下一次分组,转到Step 3;
Step 8达到分组次数后,退出。
蛙跳简化粒子群算法的流程图如图3所示。
3 改进粒子群算法在船舶排样中的应用
蛙跳简化粒子群算法定义于连续的函数空间,要将其应用到组合优化问题中,必须将其改造为离散的算法。参照文献[16],本文求解矩形件排样问题的蛙跳简化粒子群算法作如下定义:
3.1 基本概念
(1)粒子群
粒子群表示待排矩形件部分排样序列(包含是否翻转的信息)的集合。
(2)粒子位置
一个排样序列 X=(r1N1,r2N2,…,rnNn)代表了一个粒子的位置,即排样问题的一个解。其中,Ni为矩形件的序号;ri为翻转因子,只取1或-1,ri=1表示矩形件Ni横放,ri=-1表示矩形件Ni竖放。粒子的位置随着搜索的进行而不断改变,即排样序列在不断发生变化。

图3 蛙跳简化粒子群算法流程图
例如 X=(1,2,-5,3,-4)就是一个位置,表示先横放1号矩形件,接着横放2号矩形件,竖放5号矩形件,横放3号矩形件,最后竖放4号矩形件。
(3)置换子
假设某个粒子k的位置为Xk,置换子(riik,rjjk)的操作定义为交换Xk中序号为ik和jk的矩形件位置,并继承置换子中的翻转因子。即 X′k=Xk+(riik,rjjk),其中X′k为粒子 k经过置换操作后的新位置。
例如:Xk=(3,2,-1,5,4),(ik,jk)=(1,-2),表示先将排样序列(3,2,-1,5,4)中1号矩形件横放,2号矩形件竖放,再调换两者的位置,则X′k=(3,2,-1,5,4)+(1,-2)=(3,1,-2,5,4)。
(4)置换序列
一个或多个置换子组成的队列即为置换序列,它表示置换子按队列顺序依次作用在粒子位置上。((4,-1),(2,-3))就是一个置换序列,它由置换子(4,-1)、(2,-3)组成,表示先把矩形件4横放,矩形件1竖放,然后交换位置,再将矩形件2横放,矩形件3竖放,再将位置进行互换。
例如:粒子位置(4,-2,-5,1,3)与置换序列((4,-1),(2,-3))的操作
(4,-2,-5,1,3)+((4,-1),(2,- 3))=((4,-2,-5,1,3)+(4,-1))+(2,-3)=(-1,-2,-5,4,3)+(2,-3)=(-1,-3,-5,4,2)。
(5)粒子间距
粒子间距(粒子间的距离)就是一个置换序列,它表示粒子从一个位置更新到另一个位置需要的置换子的队列。用D表示间距,|D|表示间距长度即间距所含置换子的数目。间距D可以表示为:

3.2 基本操作
(1)+(位置,间距)
粒子位置与粒子间距相加,表示一组置换子序列依次作用于粒子位置上,粒子到达一个新的位置。
例如:A=(-2,-3,1,4,5)+(-1,4)=(-2,-3,4,-1,5)。
(2)-(位置,位置)
粒子的位置与位置相减,即得到粒子间距(置换序列)。
例如:A=(1,4,5,2,3),B=(1,4,-2,-3,5),分别比较A(i)和B(i),找到第一个A(i)≠B(i)的位置,即A(3)=5,B(3)=-2,则第一个置换子为(A(3),B(3))即(5,-2),更新 B=B+(5,-2)=(1,4,5,-3,-2);同理,A(4)≠B(4),第二个置换子为(2,-3),更新 B=B+(2,-3)=(1,4,5,2,-3);A(5)≠B(5),第三个置换子为(3,-3),更新 B=B+(3,-3)=(1,4,5,2,3),此时 A=B。最后得到 A-B的置换序列为((5,-2),(2,-3),(3,-3))。即A-B=D,则 A=B+D。
设定i=1,j=0,n为 A、B两个序列的长度,即待排矩形件的个数。Dj表示A-B得到的置换序列中第j个置换子。A-B具体过程如下:①若A(i)=B(i),则 i=i+1;否则 j=j+1,Dj=(A(i),B(i)),i=i+1,同时更新B=B+Dj;②重复执行①,直到i>n时退出。A -B={Dj,j=1,2,…}。
(3)⊕(间距,间距)
粒子间距与间距相加,表示把一个间距加到另一个间距末尾。如:((5,-2),(3,-3))+((4,-1),(2,-3),(3,5))=((5,-2),(3,-3),(4,-1),(2,-3),(3,5))。
(4)×(实数,间距)
间距与实数相乘,例如:cD,c为实数,D为间距。假设间距D的长度为k,乘法操作其实就是截取间距列表,使得新的间距的长度等于[ck]。例如c=0.8,k=6,则运算的结果是截取间距的前4个置换子;若c≥1,则取全部(即8个)置换子。
3.3 粒子更新公式定义
算法的粒子更新公式为:

3.4 适应度函数
本文在定宽无限长的板材上进行排样。设板材宽度为W,第i(共有n个矩形件,i=1,2,…,n)个矩形件的长为li,宽为wi。矩形件沿板材长度方向进行排放,则优化排样的适应度函数为:

式中:h为零件排样后在板材上所达到的最大高度,则理论最优高度为Hbest=max∑ni=1liwi/W,适应度函数可更新为E=Hbest/h。
3.5 终止条件
算法在达到最大迭代次数时停止。
3.6 算法步骤
算法步骤同蛙跳简化粒子群算法的步骤,只是在计算适应度函数时要调用剩余矩形法的程序。
4 排样实例测试及结果分析
本文分别对2组矩形件进行测试,测试数据见表1。实验中c1=c3=2,c2=0.8;第1组粒子群分为5组,每组5个,第2组粒子群分为5组,每组10个;组内迭代次数为1,分组次数为30;程序独立运行50次,取最高利用率对应的排样序列进行作图。因矩形件参数均为整数,故理论最低高度H′best=(Hbest)+1,此时理论最高利用率为 E′best=Hbest/H′best。2组矩形件用本文算法得到的最优排样图分别如图4、图5所示。

表1 测试数据
由图4、图5可以看出,在板材宽带为15的情况下,12块矩形件排样计算出的最低高度为20,此时板材利用率为98%,排样图已达到最优结果;66块矩形件排样计算出的最低高度为318,此时板材利用率为90.61%,优于文献[9]的排样结果(利用率88.12%)。总体来看,基于蛙跳简化粒子群算法的矩形件排样效果较好,也证明了该算法的有效性。
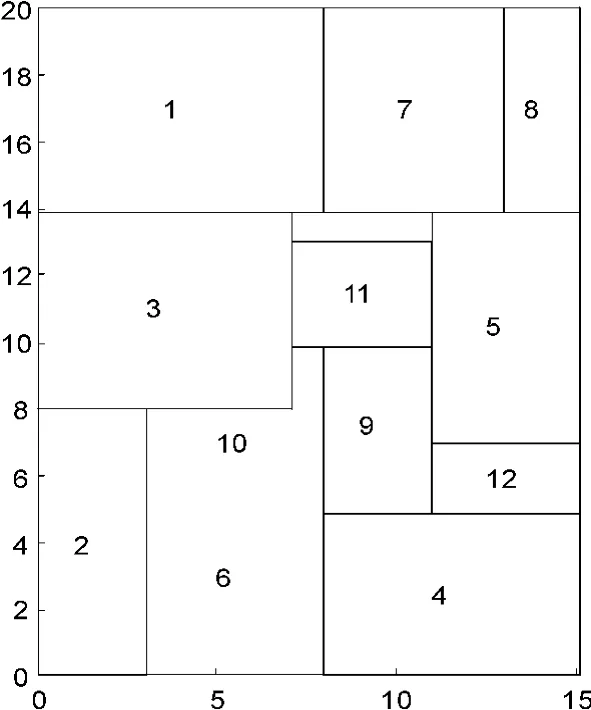
图4 12块矩形件排样结果

图5 66块矩形件排样结果
5 结论
船舶零件属于不规则形状物体,可用组合、矩形包络等方式将其转化为矩形件再进行排样[17]。本文将蛙跳简化粒子群算法经离散化后,结合剩余矩形法来求解定宽无限长板材上的矩形件排样优化问题。文中将矩形件的翻转信息加入到排样序列中,降低了程序的复杂度,提高了运行效率。2个测试实例表明,此种求解的算法能找到比较满意的排样方案,说明了此种排样方法的有效性。然而,由于剩余矩形法是将矩形件一块一块排入板材中,这样得到的排样图形有些杂乱,不方便切割,给实际的工程应用带来了困难。如何实现同规格矩形件组合后按块排入是本文下一步研究的重点。
[l]Kennedy J,Eberhart R C.Particle swarm optimization[C]//Proc.IEEE Int'I Conf.on Neural Networks.NJ Piscataway,IEEE Press,1995:1942-1948.
[2]Eberhart R C,Shi Y.Particle Swam Optimization:Development,Applications and Resources[C]//Proc.Congress on Evolutionary Com-putation.Korea:IEEE Serrice center,2001:8l-86.
[3]柯晶,钱积新.应用粒子群优化的非线性系统辨识[J].电路与系统学报,2003,8(4):12-15.
[4]孙湘,周大为,张希望.惯性权重粒子群算法模型收敛性分析及参数选择[J].计算机工程与设计,2010,31(18):4068-4071.
[5]石永生,陈家琪.基于高斯变异的量子粒子群算法[J].电脑与信息技术,2010,18(6):9-12.
[6]王华秋,曹长修.基于模拟退火的并行粒子群优化研究[J].控制与决策,2005,20(5):500-504.
[7]徐志烽.一种多粒子群的协同优化算法[J].现代电子技术,2007,(1):131 -133.
[8]胡旺,李志蜀.一种更简化而高效的粒子群优化算法[J].软件学报,2007,18(4):861-868.
[9]黄红兵.矩形件排样问题的粒子群算法求解[J].机械工程师,2007,(12):60-61.
[10]杨传华,等.定序列矩形件优化排样的二维搜索算法[J].佳木斯大学学报:自然科学版,2010,28(3):354-356.
[11]陶献伟,王华昌,李志刚.基于填充算法的矩形件排样优化求解[J].中国机械工程,2003,14(13):1104-1107.
[12]李明,周泽槐.基于粒子群算法的矩形件优化排样[J].电路与系统学报,2007,12(2):39-42.
[13]李妮.基于遗传算法的矩形件排样问题研究[D].太原:山西大学,2010.
[14]陈钊.求解矩形排样问题的离散粒子群算法[D].合肥:合肥工业大学,2009.
[15]李满江,孟祥旭,王志强.矩形件和任意多边形排样问题的算法及应用[J].贵州工业大学学报:自然科学版,2002,31(4):126-130.
[16]宋佩华.基于离散粒子群优化算法求解矩形件排样问题[D].桂林:广西师范大学,2007.
[17]贾志欣,殷国富,罗阳,等.二维不规则零件排样问题的遗传算法求解[J].计算机辅助设计与图形学学报,2002,14(5):467-470.