颗粒相运动参数的光纤式高速摄影测量方法
2012-06-28张继彬钟文琪金保昇
张继彬 陆 勇 钟文琪 陈 曦 陈 瑜 任 冰 金保昇
(东南大学能源与环境学院,南京210096)
(东南大学能源热转换及其过程测控教育部重点实验室,南京210096)
喷动床在工业生产中有着广泛的应用.喷动床流场中颗粒相的速度分布是研究气固流动规律的关键特性参数,对于指导喷动床的设计、运行以及放大都有着非常重要的作用[1-2].迄今为止,国内外学者已设计出多种测量气固喷动床内颗粒相速度的方法,包括传统技术(冲击力法、等速采样法、热平衡法、光纤探头法等)和现代手段(激光多普勒测试仪、电容层析成像法、粒子成像测速技术等)[3].这些方法已在稀相气固两相流测量中得到了成功的推广和应用.然而,关于稠密相气固两相流场内部流动的测量技术还没有实现突破性进展.
本文介绍了一种新型的、基于光纤式高速摄影技术、适用于稠密相流场颗粒相运动参数测量的技术原理.并利用该测量装置对一台截面直径为200 mm、高1 500 mm的三维喷动床进行了实验研究.实验结果证明了这种测量方法的可靠性.
1 测量原理及实现方法
利用光纤式高速摄影技术测量稠密气固两相流颗粒运动参数的技术原理框图见图1.该系统集成了光纤内窥镜成像、高速CCD摄影和数字图像处理3种技术,其测量原理如下:采用介入式的光纤内窥镜探头,将流场内部的颗粒运动信息经光学通路成像到流场外,连接在内窥镜目镜端部的高速摄像机拍摄这些颗粒的运动过程并转存为数字视频,从而完成颗粒运动图像的采集;然后,应用数字图像处理技术离线处理所获取的颗粒运动视频,并提取反映颗粒运动特性的参数.因此,该测量系统包括图像采集和图像处理两大部分.
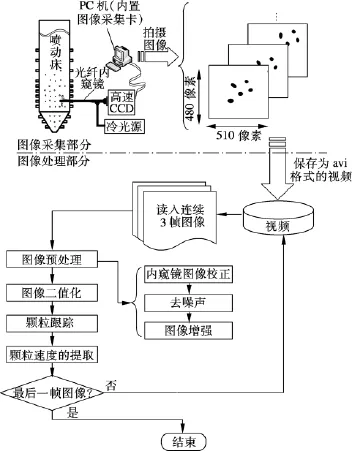
图1 光纤式高速摄影测量系统原理框图
1.1 图像采集
图像采集装置由光纤内窥镜、光源、高速CCD、图像采集卡和计算机组成.光纤内窥镜由1.44×104根FIE8型工业玻璃纤维组成,其外径为8 mm,视场角为115°,视距为5~∞ mm,并配有C型卡口的目镜.高速CCD选用的是德国Basler公司的A504k工业相机,其数据传输率可达625 MB/s,在最大分辨率1 280×1 024像素下的最大帧频可达500帧/s.图像采集卡使用的是基于PCI总线的MeteorⅡ CameraLink高速采集卡,其采集率达到50 MHz.光源采用功率为150 W的金属卤素灯.在使用光纤式高速摄影装置时,要根据被测颗粒的速度,调整高速相机的分辨率、曝光时间和采集帧率.对于慢速运动的颗粒,可将相机设定为高分辨率,增加曝光时间并降低采集帧率,以提高图像的清晰度和亮度;对于快速运动的颗粒,应将相机设定为低分辨率,减少曝光时间并提高采集帧率,以免拍摄图像中的颗粒有拖尾现象.图像采集装置所保存的视频为avi格式.
1.2 图像处理
图像处理部分的主要功能包括图像预处理、图像二值化、颗粒跟踪和颗粒速度的计算.其具体过程如下:①通过分析光纤内窥镜的成像特性,研究针对性的图像预处理算法,获取清晰、无畸变的颗粒图像;②将图像集合二值化[4],根据相同颗粒在连续帧中的成像面积和圆形度特征,完成对该颗粒在流场运动过程的识别与跟踪,实现颗粒速度的提取和颗粒相速度的统计计算.
1.2.1 图像预处理
鉴于测量系统自身的特性以及来自测量现场外部的干扰,测量得到的颗粒图像存在光学畸变、亮度不均、对比度偏低等问题,不能直接用于颗粒的识别与跟踪.因此,需要进行预处理,使之满足后续处理的要求.图像预处理的内容主要包括以下2个方面:
1)内窥镜图像的校正.光纤内窥镜属于大景深的广角镜头,其拍摄到的图像存在明显的光学畸变.这种畸变属于桶形畸变,表现在图像中即是像素点发生了径向位移.光纤内窥镜图像的校正就是利用多项式将畸变图像的像素点坐标变换为理想图像的像素点坐标[5-7].本文通过计算已知点阵样板的畸变像素坐标(x,y)和理想像素坐标(u,v)的映射关系,拟合出二次多项式的系数,并利用该多项式对畸变小米颗粒图像进行校正.采用的点阵样板见图2(a),圆心间距为2 mm,校正前后的点阵样板图像分别见图2(b)和(c).使用的二次多项式为

式中,T(r)为校正变换函数;r为像素点与光学中心的距离;a0,a1,a2为多项式系数.校正效果见图2(d)和(e),图中小米颗粒粒径相同,校正前边缘处的小米颗粒有一定的畸变,校正后得到了恢复.

图2 内窥镜图像校正方法示意图
2)图像增强.光纤内窥镜的内部照明光为会聚光形式,由光纤束导入.图像的亮度沿半径方向由中心向边缘逐渐减弱,造成图像亮度不均匀且局部对比度较低.本文使用基于照度-反射模型的同态滤波频域增强算法进行图像增强处理[8-9],该算法通过同时进行灰度范围压缩和对比度增强来改善图像.采用的滤波器为高斯型高通滤波器,滤波器函数H(u,v)可表示为

式中,γH,γL分别为高、低频增益,且 γL<1,γH>1;D(u,v)为频率(u,v)到频谱平面原点(u0,v0)的距离;D0为截止频率;c为常数,用于控制滤波器函数斜面的陡度.本实验中取 γL=0.9,γH=3.6,c=3.经过同态滤波算法处理后,图像的整体对比度和局部细节清晰度明显提高.
1.2.2 颗粒的跟踪
颗粒的跟踪即是确定同一颗粒在连续3帧图像中的重心坐标.本测量方法利用颗粒在图像中的像素面积[10]和圆形度作为颗粒识别的几何联合特征,在连续3帧图像中搜索具有相似联合特征的颗粒,从而实现颗粒的跟踪.具体实现步骤如下:
① 读取连续3帧图像 fn,fn+1,fn+2,为每帧图像中的颗粒连通域进行标号,并提取每个颗粒的几何联合特征.
②按照标号递增顺序选取fn中的第i号颗粒,然后在fn+1中搜索与颗粒i具有相似联合特征的颗粒 j.设定阈值 ε,当联合特征满足时,视为颗粒对匹配成功,其中和分别为2个匹配颗粒对的像素面积和分别为2个匹配颗粒对的圆形度.
③采用②中的方法,在fn+2中搜索与颗粒j相匹配的颗粒k.由此可知,同一颗粒在连续3帧图像中的位置分别为颗粒i,j,k的重心坐标.
④对所有颗粒进行跟踪后,即可完成连续3帧图像中颗粒的跟踪.
1.2.3 颗粒运动速度的计算
完成颗粒跟踪后,由同一颗粒在连续3帧图像中的重心坐标可获得颗粒的运动轨迹,进而得到颗粒运动速度.
由于像素距离到实际距离的标定值与颗粒到内窥镜镜头面的距离有关,为了保证所处理的颗粒到镜头面的距离在一定范围内,需要对图像中的颗粒进行筛选.图3为静态小米颗粒与镜头面的距离l分别为5,8,10,13 mm 时的图像.由图可知,当 l≤5 mm时,成像模糊,且单个颗粒占据了大部分拍摄视场,遮挡了5 mm以外运动颗粒的成像;当l>20 mm时,内窥镜接收不到足够的颗粒反射光,成像亮度偏暗.经过多次实验发现,当l∈(8~10)mm时成像效果最佳.此时,经过校正处理并二值化后,颗粒的像素面积在700~1000像素范围内.因此,将像素面积不在此范围内的颗粒予以剔除.
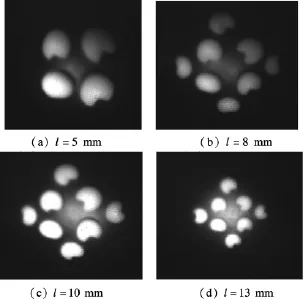
图3 不同拍摄平面上静态颗粒成像效果
基于以上颗粒筛选的结果,图像中颗粒速度的计算可分为以下3步:①读取连续的3帧图像,并跟踪同一颗粒在3帧图像中的位置,得到该颗粒重心随时间变化的像素坐标;② 由于颗粒在图像中的位置是随时间而变化的,将颗粒在3帧图像中的横坐标与纵坐标分别与时间联立,形成颗粒在水平与垂直方向的运动轨迹,该运动轨迹的斜率即为颗粒在图像中的速度(像素/ms);③ 利用像素坐标到世界坐标的标定值,计算出颗粒在实际空间中的运动速度(m/s).
2 实验与结果分析
2.1 实验装置
本实验是在气固喷动床实验台上完成的,实验装置如图4所示.喷动床是一个高1 500 mm、截面直径为200 mm的管状装置,由5 mm厚的有机玻璃板制成;其底部为锥体状,锥高156 mm,锥角为60°;管壁上依次布置着2列对称的光纤内窥镜测量口.实验采用小米和空气作为实验工质,小米粒径为1.8~2.1 mm.将小米加入喷动床中,空气由空气压缩机提供,经锥部喷动风进口进入喷动床内,小米在气流的作用下进行喷动运动.图4中床体内箭头表示小米颗粒的运动方向.实验中选择喷动床的3#口作为测量区域,将内窥镜镜头插入3#测量口,改变镜头面的径向位置,使镜头面至喷动床中心轴线的距离 r'依次为 20,50,65,75 mm.

图4 测量点分布的原理图和实物图对照
在实验中,对2个工况进行测量,其喷口气速Ums分别为39和43 m/s.在每个径向测量点拍摄颗粒运动过程的视频.拍摄完成后,按照第1节的方法,对视频图像进行分析处理.工业相机的分辨率设置为512×480像素,帧频为1 000帧/s,床体内为常压.
2.2 结果分析
基于欧拉法的思想,研究了某一时间段内颗粒经过某空间点时的流动特性.下面以 Ums=39 m/s、3#口处r'=75 mm时的情况为例,分析颗粒相的速度分布.测量时间为8 s.
图5(a)为小米颗粒群瞬时速度水平分量(x轴方向)的散点图.由图可知,颗粒大多向x轴正方向运动,速度分布较为集中.图5(b)为瞬时速度水平分量的概率分布统计.由图可知,速度在[0.39,1.10]m/s范围内的颗粒数超过80%,经计算得到此区间内速度的平均值为0.74 m/s.因此,可将经过此空间区域的颗粒在x轴方向的速度分量值视为0.74 m/s,方向为正.这种根据颗粒瞬时速度的概率分布计算出的速度,称为该测量点上颗粒的相速度.

图5 小米颗粒群瞬时速度水平分量(x轴方向)数据
同理,可获得颗粒在垂直方向(y轴方向)的速度分量分布,颗粒主要是向y轴负方向运动的.经过概率统计后可知,速度在[-1.210,-0.224]m/s范围内的颗粒数超过总颗粒数的80%,此区间内速度的平均值为-0.72 m/s.因此,经过此空间区域的颗粒在y轴方向的速度分量值可视为-0.72 m/s,方向为负.
采用同样的方法,分析Ums为39和43 m/s的2种工况下3#口处4个径向测量区域的颗粒速度分布,结果见图6.
图6(a)为颗粒在垂直方向的速度分量沿径向的分布,可将其分为A,B,C三个区域.A区中的颗粒在喷射气流作用下向上运动,且随着与中心轴无量纲距离(r'/R,其中R为喷动床半径)的增大,颗粒的速度逐渐减小,表明气流的作用力逐渐减弱;B区中的颗粒向下做落体运动,且随着与中心轴距离的增大,颗粒的速度也逐渐增大,表明颗粒被喷射的高度也增大;C区中的颗粒也向下运动,但随着到管壁距离的减小,速度逐渐减小且趋向于0,表明近壁面处的颗粒趋于静止.不同区域间均存在一个过渡区,A区与B区的分界面是喷动区与环隙区的界面.A,B区中颗粒的速度变化与Takeuchi[11]的仿真结果和 He[12]的实验结果一致.本实验所得到的C区颗粒的垂直速度变化则未见文献报道.另外,喷口气速越大,喷泉区颗粒在垂直方向的速度分量也越大.
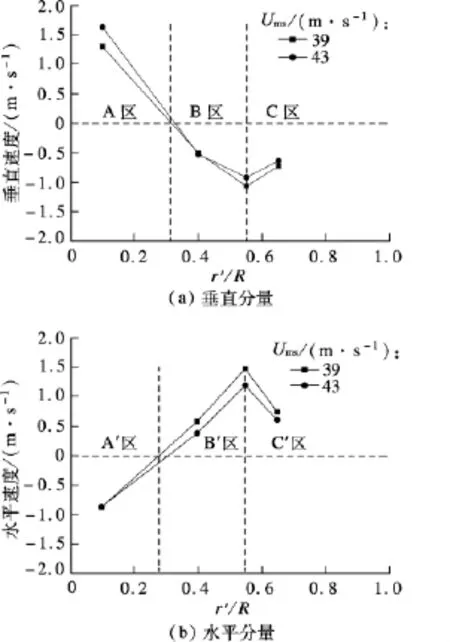
图6 喷动床3#口颗粒相速度垂直和水平分量的径向分布
图6(b)为颗粒在水平方向的速度分量沿径向的分布,亦可分为 A',B',C'三个区域.这里所指的水平分量是指沿x轴方向的速度分量.A'区中的颗粒向x轴负方向运动,且到中心轴的距离越远,速度越小;B'区中的颗粒向x轴正方向运动,随着到中心轴距离的增大,其速度也逐渐增大;C'区中的颗粒随着到管壁距离的减小,向x轴正方向的速度也逐渐减小.由图6(b)可知,颗粒水平方向速度在径向的分布反映了喷动床中局部区域气流的变化;这一结论的准确性有待进一步考证.
3 结论
本文基于光纤成像技术、高速摄影技术和数字图像处理技术,研制了一套适用于稠密气固两相流颗粒相运动参数测量的光纤式高速摄影装置,并将此系统应用于一台自制的三维喷动床的实验研究中.实验结果表明,根据颗粒相垂直速度的分布,颗粒在喷动床内轴向截面上的垂直运动状态分为3种.颗粒位于A区时,其垂直速度大于0,即颗粒群中超过80%的颗粒随着气流向上运动;颗粒位于B区时,其垂直速度小于0,即颗粒群中80%的颗粒向下运动,且0.6r'/R位置处颗粒下落速度达到最大;颗粒位于C区时,其垂直速度仍然向下,但是垂直速度的模向着管壁方向减少,趋于0.颗粒在A,B区域的实验结果与相关文献的模拟预测和实验结果吻合,但是颗粒在C区的运动特性未见报道,有待进一步证实.总之,基于光纤式高速摄影技术的测量系统可以准确测量喷动床内气固两相流颗粒相的运动参数.有关测试装置的系统误差还需在后续的研究中进行进一步的定量分析.
References)
[1]钟文琪.喷动流化床流体动力学特性及放大规律研究[D].南京:东南大学能源与环境学院,2007.
[2]石惠娴.循环流化床流动特性PIV测试和数值模拟[D].杭州:浙江大学能源工程学系,2003.
[3]吴学成.多相流颗粒运动特性的激光测试技术研究[D].杭州:浙江大学能源工程学系,2007.
[4]张继彬.基于光纤式高速摄影技术测量稠密颗粒相特性参数的方法研究[D].南京:东南大学能源与环境学院,2012.
[5]Smith W E,Vakil N,Maislin A.Correction of distortion in endoscope images[J].IEEE Transactions on Medical Imaging,1992,11(1):117-122.
[6]Hsu C H,Miaou S G,Chang F L.A distortion correction method for endoscope images based on calibration patterns and a simple mathematic model for optical lens[J].Biomed Eng:Appl Basis Commun,2005,17(6):309-318.
[7]刘航,郁道银.广角成像系统光学畸变的数字校正方法[J].光学学报,1998,18(8):1108-1112.Liu Hang,Yu Daoyin.Distortion correction of the wideangle optical system with digital technology[J].Acta Optica Sinica,1998,18(8):1108-1112.(in Chinese)
[8]Gonzalez R C,Woods R E.数字图像处理[M].阮秋琦,等译.北京:电子工业出版社,2007:183-186.
[9]陈冬青,谢洪波,郁道银.基于照明反射模型的内窥镜图像增强方法研究[J].中国生物医学工程学报,2000,19(4):378-381.Chen Dongqin,Xie Hongbo,Yu Daoyin.Enhancement of endoscopic image base on the illumination-reflectance model[J].Chinese Journal of Biomedical Engineering,2000,19(4):378-381.(in Chinese)
[10]Soille P.Morphological image analysis:principles and applications[M].2nd ed.New York:Springer-Verlag,2003.
[11]Takeuchi S.Discrete element simulation of a flat-bottomed spouted bed in the 3D cylindrical coordinate system[J].Chemical Engineering Science,2004,59(17):3495-3504.
[12]He Y L.Particle velocity profiles and solid flow patterns in spouted beds[J].The Canadian Journal of Chemical Engineering,1994,72(4):561-568.
