桩锤同步振动系统的机电耦合特性及同步控制
2012-05-10乌建中张大兵
来 鑫,乌建中,周 文,张大兵
(同济大学 机械与能源工程学院,上海 201804)
多锤联动技术是将多台桩锤以组合方式进行合力打桩,该技术很好地解决了单台振动桩锤功率有限的问题.目前工程上应用的联动方式都是利用轴联器等机械机构连接每台振动锤的相应旋转轴,强制实现同步,如在港珠澳大桥东西人工岛工程上,美国APE公司用8台振动锤合力振沉了120根直径为22m的圆管桩;日本曾在关西国际机场工程上以联动轴串联8台150kW振动桩锤贯入了直径23m的大型钢圆筒[1].这种机械式联动方式具有联动机械结构复杂且易损坏[2],安装复杂,同步精度低等不足,在工程推广方面受到了一定的限制.为此提出了多桩锤控制同步的联动新方法,该方法是将多台桩锤并联置于桩上,通过检测桩锤偏心块之间的相位差,利用控制技术使桩锤间速度与相位同步,达到能量最大合成.在试验中发现桩锤间存在较强的机电耦合作用,影响同步控制效果,因此在机电耦合特性下对桩锤控制同步展开研究具有重要的意义.
本文对两桩锤同步振动系统建立了机电耦合数学模型和仿真模型,并对其进行了仿真分析.在此基础上对同步控制策略与控制算法进行研究,得出了适宜的控制方式.最后通过打桩试验,验证了机电耦合规律的正确性与同步控制策略及算法的有效性.
1 同步振动系统的机电耦合数学模型
1.1 “锤-桩-土”系统动力学方程
两桩锤同步振动系统是指将两台桩锤置于桩上进行合力打桩,这样“锤-桩-土”就构成了复杂的耦合系统.根据前苏联巴尔坎教授的单自由度振动打桩模型[3],在建立动力学模型时做了如下假设:
(1)土壤为弹性体,桩锤与桩视为绝对刚体.
(2)桩随桩锤振动时,土壤对桩的阻尼力和弹性力分别是桩运动速度与位移的线性函数.
在沉桩过程中,桩下沉速度对整个振动体系的影响较小,作用可以近似等效成一个弹簧和一个阻尼器.桩下移时在振动平衡点附近可以把弹性力近似为线性力,由于土壤的粘性不大,阻尼力可以近似为与速度成正比的线性力.因此在上述两个假设下建立动力学模型是合理的.
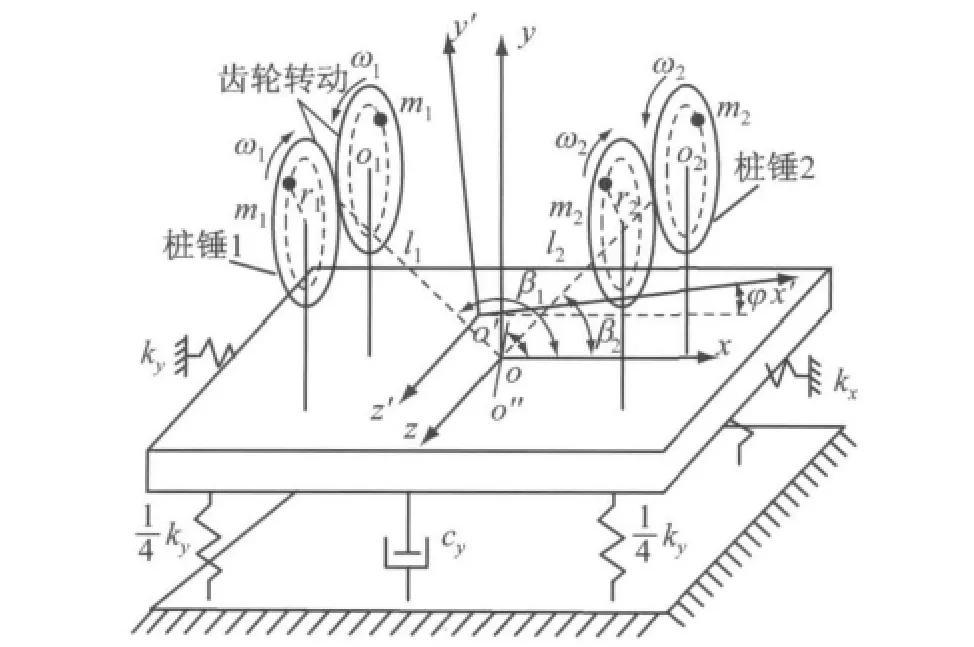
图1 两桩锤同步振动系统力学模型Fig.1 Model of two hammers synchronous system


式中:M为桩锤(不包括偏心块)和桩的质量;J0为桩锤(不包括偏心块)和桩的转动惯量;mi为偏心块i的质量(i=1,2);ri为偏心块i的偏心距(i=1,2);Ji为电机i的转动惯量(i=1,2);Tmi为电机i转轴上的电磁转矩;Tfi为电机i转轴上的负载转矩(i=1,2);kx,ky,kφ分别为x,y,φ方向上的等效土壤刚度系数;cx,cy,cφ分别为x,y,φ方向上的土壤阻尼系数.
1.2 三相异步电机的数学模型
桩锤驱动采用的是三相异步电机.本文采用二相同步旋转坐标系下的数学模型,其状态方程[5]为

式中:Ids,Iqs为在二相同步旋转坐标系dq下的定子端电流分量;Idr,Iqr坐标系dq下的转子端电流分量;Lm为定、转子互感;Ls,Lr分别为定、转子自感;Rs,Rr分别为定,转子电阻;ω1,ωr分别为同步旋转角速度和转子角速度;Uds,Uqs为坐标系dq下的定、转子端电压分量;Udr,Uqr为dq坐标系下的转子端电压分量;np为电机极对数;J为电机转动惯量;D为摩擦及风阻阻力矩系数;TL为电机的负载转矩.
式(1)~(3)组成了两桩锤同步振动系统的机电耦合数学模型.从模型上看该系统是一个多变量耦合的非线性系统,反映了沉桩过程中“锤-桩-土”系统之间的机电耦合关系.
2 系统机电耦合特性仿真分析
由于所建立的机电耦合数学模型的非线性与复杂性,很难求出解析解,对于这类非线性方程一般采用近似法和数值法进行求解.本文选择 Matlab/Simlink数值仿真软件对系统进行仿真分析,得出系统机电耦合的一般规律.仿真中的土壤参数根据参考文献[6]及GB5004096设计规范进行选取,具体数值如下:等效刚度系数ky,kφ分别取值为2×108N·m-1,1×105N·m·rad-1,等效阻尼系数cy,cφ分别取值为2×105N·s·m-1,0.2×105N·s·rad-1.仿真中桩锤选用DZPJ90型电驱式振动锤的参数.随着桩的下沉,等效刚度系数与阻尼系数逐渐增加,但在离散的一定厚度的同一土层内可以近似认为是不变的,因此在小段时间内对系统进行仿真是合理的.
在理想状态(即两桩锤对称布置,其机械结构、几何尺寸、电机性能等参数一致)下进行数值仿真(假设初始相位差为π/2).当两桩锤电机转速相等时的仿真结果见图2,可以看出相位差会逐步收敛于零,并且在一定的范围内电机转速越高,收敛的速度越快,但电机的转速达到约1 400r·min-1时,相位差会趋于非零值,如图2c所示,说明使相位差自动收敛于零的转速有极限值,进一步分析该值与土壤参数密切相关.在相位差趋于零的过程中,y方向上的振幅由较紊乱逐步趋于稳定,扭摆角逐步衰减并稳定在零,如图2a与图2b所示.图2d为两电机转速仿真曲线,可以看出转速也自动趋于同步,以维持相位差的稳定.
仿真时一台桩锤电机转速为1 100r·min-1,另一台桩锤电机的转速分别给定1 085,1 095,1 100,1 110,1 115r·min-1,仿真得到的相位差曲线如图3所示,说明在转速相差不大的情况下相位差会自动收敛于一个非零角度,且在该值附近微小波动,两电机转速相差越大,偏离零角度越远,波动也越大.
图4为两桩锤电机转速相差25r·min-1(桩锤1的电机转速为1 100r·min-1,桩锤2的电机转速为1 125r·min-1)时的仿真情况,可以看出在转速相差较大的情况下相位差曲线是发散的,机电耦合作用变得很弱.


图4 电机转速相差较大的相位差仿真结果Fig.4 Simulation results when the difference of motor speeds is big
这种在一定条件下相位差会自动趋于零或某个固定值的现象称为自同步现象[7],它是由Huygnen发现的.桩锤同步振动系统中出现的自同步现象是“锤-桩-土”系统间力和能量耦合的结果.要取得良好的自同步效果,两桩锤需对称布置,其机械结构、几何尺寸、电机性能等需一致,两电机转速需相等或相近.在仿真中还发现,土壤参数对自同步的影响较复杂,总的规律是随着桩的贯入,桩锤间的机电耦合作用有减弱的趋势.
3 机电耦合下的同步控制策略及算法
由于桩土动力响应的复杂性与非线性,加上桩锤结构、电机特性、安装位置等因素的差异,两台桩锤的同步方式仅依靠自同步是不够的,应为控制同步方式.要使两锤同步振动(即相位差为零),两电机的转速需相等,而消除相位差只能通过改变电机转速实现.因此同步控制的基本策略为:当两桩锤电机转速相差较大时只进行转速的调节;当转速差减小到一定范围内后,改变转速消除相位差.协调好速度与相位差的关系,使速度与相位均维持同步状态.
由上文的仿真分析得知,桩锤间机电耦合的结果是相位差会稳定在零或一个固定值,且这种机电耦合作用是固有存在的,而控制同步的控制准则是通过调节转速消除相位差,要求转速必须稳定可调可控,所以机电耦合在一定程度上对控制同步具有阻碍作用,因此同步控制策略及同步控制算法是十分重要的.
在速度的同步上采用矢量控制技术[8].矢量控制实现的基本原理是通过测量异步电机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,达到高性能调速的目的.目前通用的新型变频器均具有矢量控制功能.
同步控制策略主要有以下两种方式:主从方式和虚拟主令方式.主从方式是指以一台桩锤的相位为基准,另一台桩锤相位与该基准相比较,以消除两桩锤之间的相位差为控制目的.虚拟主令方式是指根据转速情况用软件虚拟出基准的相位信号,两台桩锤的相位信号分别与虚拟锤相位信号比较,以分别消除两桩锤与虚拟锤之间的相位差为控制目的.两种控制策略的结构如图5所示,由图5可知主从方式相位差调节只对一台桩锤进行调节,而虚拟主令方式是两台桩锤同时调节.至于相位调节控制算法初步选用PID控制算法与最速控制算法(BangBang算法)[9].

在机电耦合Matlab/Simulink仿真模型中分别加入上述两种控制策略与控制算法进行仿真分析,这样就组成了“主从方式 PID”、“主从方式BangBang”、“虚拟主令PID”、“虚拟主令BangBang”等4种控制方式,利用仿真模型可对这4种控制方式在机电耦合下的同步效果进行数值仿真.图6a为4种控制方式下的相位差情况,可以看出,控制同步的同步所需时间明显短于自同步,且控制同步能够消除自同步的固定相位差;由于机电耦合的影响,控制同步后的相位差曲线一直在零度附近进行小波动,同步情况满足要求;BangBang控制算法超调量小,调整时间短;虚拟主令方式的控制效果要优于主从方式.图6b为当一台桩锤的转速受扰(在5s时转速突然减小10r·min-1并持续1s后恢复正常)时的相位差变化情况,可以看出在受扰时PID算法的抗扰能力要强于BangBang控制算法,BangBang控制算法对干扰有较大的超调,虚拟主令方式的控制效果要优于主从方式.
综合以上的仿真分析,从同步响应时间、同步效果、抗扰能力等方面综合进行考虑,采用的控制方式为“虚拟主令PID”较为合适,该方式具有响应速度快、超调小、抗扰能力强,同步精度高等优点.

4 试验研究
试验装置如图7所示.该试验装置由两台小型试验桩锤(机械结构参数完全一致)、钢管桩、控制器、数据采集及处理部分等组成.传感器实时采集两桩锤的偏心块位置并送入控制器,控制器计算出相位差及电机速度,两锤电机转速通过控制器以通信方式实时送给变频器,计算机实时记录并处理数据.利用该试验装置可以进行打桩试验,验证机电耦合规律及控制同步的效果.
首先进行了自同步试验,试验时桩已经贯入土壤约0.7m.由图8a可知相位差角能快速地收敛到零,并在零度附近波动,系统达到了稳定的同步振动状态.当一台桩锤的电机转速为1100r·min-1,另一台桩锤电机转速分别给定为1 100,1 110,1 120 r·min-1时,系统稳定后分别得到的相位差试验曲线如图8b所示,这时相位差会稳定在固定角度且有小波动,两桩锤电机转速相差越大,相位差偏离零度位置越多,波动范围也越大.当两桩锤电机转速差为25r·min-1时的试验结果如图8c所示,可见不能进入自同步状态.试验结果与机电耦合的数值仿真结果基本是一致的,验证了数学模型与仿真结果的正确性.

图8d是采用“虚拟主令PID”控制方式得到的相位差试验曲线,可以看出控制同步能消除自同步带来的固定相位差,相位差误差控制在弧度为±0.02内,能够满足实际的工程应用.从相位差曲线还可以看出,控制同步方式的相位差波动比自同步方式大,这是控制同步与机电耦合共同作用的结果,即控制同步的控制要求是消除相位差,而机电耦合的结果是维持固定的相位差,由此可见在大多数情况下,机电耦合对于控制同步是不利的.试验中发现,随着桩的贯入,两桩锤间的机电耦合作用有减弱的趋势,当试验桩贯入地下约2m时,机电耦合的影响减弱,此时控制同步同步精度明显提高,相位差稳定后的波动非常小,如图8e所示.
5 结论
(1)通过对桩锤同步振动系统的机电耦合、控制策略及算法进行建模仿真与试验验证,证明了通过控制方法实现桩锤同步振动是可行的,为大直径桩基的施工提供了新思路,具有较广阔的应用前景.
(2)机电耦合的结果是在一定的条件下出现自同步现象,即相位差会自动稳定在零度或某个固定角度附近.由于桩土动力响应的复杂性与非线性,加上桩锤结构、电机特性、安装位置等因素的差异,在打桩中应用自同步是不够的,应为控制同步方式.
(3)机电耦合是固有存在的,两桩锤之间具有较强的力与能量传递,通过转速的变化促使出现自同步现象,相位差会有趋于零或某个固定角度的趋势,而控制同步是通过改变转速消除相位差,因此系统的机电耦合作用对于控制同步是不利的.
(4)本文通过对机电耦合下的同步控制策略与算法仿真分析,从同步响应时间、同步效果、抗扰能力等方面综合考虑,确定了采用“虚拟主令PID”的控制方式,仿真和试验皆验证了该控制策略及算法的有效性.
[1] 袁孟全,徐文华,李永全.大直径钢圆筒振动下沉设备及工艺的研究与应用[J].建筑机械,2004(2):45.
YUAN Mengquan,XU Wenhua,LI Yongquan.Study and application of vibratory sinking equipment and technology for steel cylinder with large diameter[J].Construction Machinery,2004(2):45.
[2] 罗春雷.液压振动桩锤沉桩动力学及调频调矩控制研究[D].长沙:中南大学机电工程学院,2005.
LUO Chunlei.Hydraulic vibratory pile hammer sinking pole’s dynamics,adjustment frequency and adjustment moment of force’s research [D].Changsha:Central South University,College of Mechanical and Electrical Engineering,2005.
[3] 杨静,周永礼.振动打桩机施工影响的简化分析[J].中国科技信息,2008(8):54.
YANG Jing,ZHOU Yongli.Simplified analysis of effects on buildings near the site caused by a vibration-impact pile driver during construction [J]. China Science and Technology Information,2008(8):54.
[4] 贾晓辉,田延岭,张大卫.3-PRR柔性并联机构动力学分析[J].农业机械学报,2010,41(10):199.
JIA Xiaohui,TIAN Yanling,ZHANG Dawei.Dynamics analysis of 3-PRR compliant parallel mechanism [J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(10):199.
[5] 王步来,黄磊,顾伟.基于绕组复变换的双三相异步电动机建模研究[J].系统仿真学报,2011,23(6):1069.
WANG Bulai,HUANG Lei,GU Wei.Modeling on dual threephase induction machine based on double winding transformation[J].Journal of System Simulation,2011,23(6):1069.
[6] 罗春雷,韩清凯.液压驱动控制的偏心回转系统同步特性[J].机械工程学报,2010,46(6):176.
LUO Chunlei,HAN Qingkai.Synchronization characteristics research of eccentric gyration system controlled by hydraulic driving[J].Journal of Mechanical Engineering,2010,46(6):176.
[7] 王得刚,赵清华,赵春雨,等.同向回转双机驱动振动系统的自同步特性[J].振动、测试与诊断,2010,30(3):217.
WANG Degang,ZHAO Qinghua,ZHAO Chunyu,et al.Selfsynchronous feature of a vibrating system driven by two motors with the same rotation direction [J].Journal of Vibration,Measurement &Diagnosis,2010,30(3):217.
[8] 靳慧,史丽萍,温树峰.通用变频器控制系统设计[J].变频器世界,2011(7):95.
JIN Hu,SHI Liping,WEN Shufeng.Design of the control system in the general inverter[J].The World of Inverters,2011(7):95.
[9] 李军,张涛,黄浦,等.基于双模态控制器的中心式快门控制[J].信息与控制,2010,39(6):789.
LI Jun,ZHANG Tao,HUANG Pu,et al.Central shutter control based on dual-mode controller[J].Information and Control,2010,39(6):789.
