基于声学风洞的麦克风阵列测试技术应用研究
2012-04-17陈正武王勋年李征初刘志涛崔红芳
陈正武,王勋年,李征初,刘志涛,崔红芳
(中国空气动力研究与发展中心空气动力学国家重点实验室,四川绵阳 621000)
0 引 言
随着航空运输业的高速发展,民用飞机数量的剧增,大型客机噪声污染问题已经引起世界范围内的关注。大型客机噪声源主要包括发动机噪声和增升装置、起落架等机体噪声。近年来,由于大涵道比涡轮风扇发动机及其发动机降噪研究成果的实际应用,发动机噪声已经明显降低,特别是在大型客机起飞和降落阶段,机体噪声已经取代了发动机噪声成为大型客机主要噪声源。因此大型客机机体噪声降噪研究已经成为目前国际气动噪声研究领域的热点研究问题。
声学风洞为大型客机气动噪声研究提供了一种有效的研究平台。为有效地评估大型客机机体噪声的影响,指导大型客机降噪研究,需要针对声学风洞的特点,发展一种有效的噪声测试技术,准确测量大型客机机体噪声源的分布。
近年来从无线电、雷达等信息领域发展起来的麦克风阵列测试技术能准确地识别噪声产生的区域以及量化噪声的强度,已经成为现代声学测量的关键测试设备。麦克风阵列由一定数量的麦克风传感器组成,根据麦克风传感器到扫描点的距离不同,利用各个麦克风间的声音信号振幅和相位的关系,采用“延迟求和”算法[1-2]实现声源的定位。一直以来,由于数据采集设备和计算机水平限制,麦克风阵列所用麦克风数量受到限制,其分辨率和信噪比都比较低,麦克风阵列一直没得到广泛应用。近年来,由于计算机的飞速进步以及数采设备的快速发展,采用多通道麦克风阵列能有效克服分辨率低和信噪比低的缺点。麦克风阵列测试技术已经成为现代飞行器气动噪声试验研究过程中最有效的声学测试技术。
为了将麦克风阵列测试技术用于声学风洞试验研究,针对中国空气动力研究与发展中心0.55m× 0.4m声学风洞的特点,介绍一种基于声学风洞的麦克风阵列应用技术。并采用36通道的螺旋型麦克风阵列进行试验验证。最后还测量NACA23018翼型的气动噪声源分布,研究其噪声特性。
1 试验设备和仪器
1.1 0.55m×0.4m声学风洞
试验在0.55m×0.4m声学风洞进行,如图1所示。0.55m×0.4m声学风洞是一座单回流式低速风洞,具有开口、闭口两个试验段,其中开口试验段长1.5m,宽0.55m,高0.4m,主要用于声学试验。开口试验段空风洞最大风速为100m/s,背景噪声范围75~80dB(A)(气流风速80m/s,截止频率100Hz,气流轴线中心外2m处测得)。开口试验段外是一个内部尺寸为5.5m宽,3.7m长,4m高的消声室,消声室截止频率为100Hz。

图1 0.55m×0.4m声学风洞Fig.1 0.55m×0.4manechoic wind tunnel
1.2 麦克风阵列系统
试验所采用的麦克风阵列由36个1/4英寸MPA416麦克风传感器组成。MPA416型传感器的频率范围为20Hz~20kHz,动态范围为29~127dB。麦克风中传感器的布置方式为多臂螺旋形,总共有6条螺旋臂,每条螺旋臂上包含6个麦克风传感器,如图2所示,麦克风阵列的直径约为1.0m。
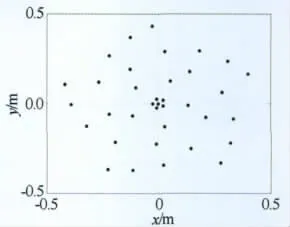
图2 麦克风阵列分布图Fig.2 Microphone array layout
麦克风阵列数采系统为48通道BBM公司的MKII便携式数采系统,其最高采样频率可达204.8kHz(图3)。

图3 麦克风阵列数采系统Fig.3 Data acquisition system of microphone array
2 麦克风阵列数据处理方法
2.1 波束成形(beamforming)算法
麦克风阵列数据处理时首先生成麦克风阵列互谱矩阵(CSM)。具体计算时首先将麦克风采阵列的信号数据分块,采用快速傅里叶变换(FFT)将时域数据转换为频域数据。那么麦克风阵列的互谱矩阵可表示为
式中矩阵元素为:

其中K为阵列信号数据块数,M表示阵列中麦克风数目,Pmk(f)表示第m个麦克风第k段数据块的频域信号,Ws为频谱分析选取的数据窗函数因子,窗函数选为hamming窗,上标*号表示共轭。互谱矩阵下三角元素通过上三角对应矩阵元素复共轭得到。
麦克风阵列的数据处理算法采集基于“延迟求和”的波束成形算法[1-2]。假设在声学试验模型附近存在一扫描平面,对于扫描平面上任一扫描点,阵列的指向向量为:

式中x表示扫描点与麦克风之间的距离向量,k表示声波波数向量,rm表示声波扫描点与麦克风之间的传播距离,rc表示阵列中心点与扫描点之间距离,Am表示由风洞射流剪切层引起的第m个麦克风的振幅修正因子,ωΔtm,shear为由风洞射流剪切层引起的第m个麦克风的相位修正值。那么声学风洞试验时麦克风阵列的输出功率谱为:

式中上标T表示转置,p(^e)表示单位带宽声压的压力均方值,除以(M2-M)表示将阵列输出功率谱转化到单一麦克风的量级。扣除互谱矩阵^C对角线元素主要是抑制麦克风自噪声的影响。式(3)针对窄带信号求解的,对于宽频信号,比如1/3倍频程、倍频程等,可采取对窄带信号求和的方式求解。
2.2 风洞射流剪切层修正
在声学风洞进行气动声学试验时,麦克风阵列位于试验段射流外部,声波穿过风洞射流剪切层时,剪切层对声波产生折射效应,剪切层的折射效应会改变声波传播方向和声音量级。因此需要进行剪切层修正,提高麦克风阵列测试的精准度。
风洞射流剪切层影响根据Amiet[3-4]介绍的声波穿过剪切层的折射理论进行修正。即根据麦克风位置、剪切层位置以及麦克风阵列扫描点位置之间的几何关系,对流波动运动关系以及斯涅尔(Snell)折射定律,采用迭代算法求解麦克风阵列扫描点与麦克风之间声波的真实传播路径。具体算法可参考文献[3-4]。数据处理过程中剪切层位置取为风洞喷口位置。确定声波的真实传播路径后,剪切层的延迟时间为:

式中Rpath为声波的真实传播路径,Rm为麦克风传感器与扫描点之间的距离。由于声源振幅在麦克风阵列测试结果中处于相对次要地位,并且由剪切层引起的声波振幅变化对麦克风阵列识别声源的结果影响相对较小,具体应用时将不做剪切层振幅修正。
3 麦克风阵列性能的数值模拟
阵列响应图谱中主瓣和旁瓣是阵列性能设计研究的热点问题。阵列响应图谱中主瓣的宽度(称之为瓣宽,定义为在阵列响应图谱中与阵列最大响应点相差为3dB处对应的主瓣宽度)决定阵列的分辨率,它是阵列定位声源的能力和分辨临近空间声源的重要度量参数。阵列响应图谱中旁瓣相对于主瓣的差值确定了阵列的动态范围。因此阵列响应函数是评估阵列性能指标的重要参数。麦克风阵列响应表达式如下:

式中x0为声源位置,r0和r0m分别为声源至麦克风阵列中心和第m路麦克风的距离,r和rm分别为扫描点至麦克风阵列中心和第m路麦克风的距离。wm是第m路麦克风的相应加权因子。相对于声源点x0,麦克风阵列对任一点的响应为:

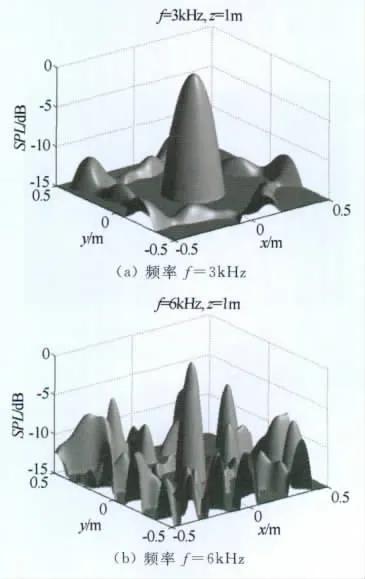
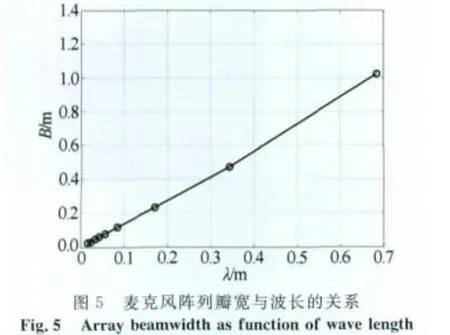
图4给出了采用公式(6)计算的频率为3、6、8kHz时36通道螺旋型麦克风阵列响应图谱。由图可知,随着频率的增大,阵列瓣宽迅速减小,阵列的动态范围减小。当频率范围为1~8kHz,动态范围大于7dB。图5给出了阵列瓣宽与波长(频率)的关系曲线,通过曲线拟合可得36通道螺旋型麦克风阵列的瓣宽为波长的1.48倍。

首先采用数值仿真的手段检验麦克风阵列识别声源的能力。数值仿真时声源模型为两个单位强度点声源,位置分别为(-0.2,0,1.05)m,(0.2,0,1.05)m,频率分别为4、6kHz,并增加强度为声源模型强度50%的随机噪声信号。图6给出了仿真数据的麦克风阵列数据处理结果,由图可知,麦克风阵列识别出的声源位置与声源模型位置基本是一致的,并且随着声源频率的升高,阵列空间分辨率也越来越高。同时当频率增大时,声源分布图中虚假声源也逐渐增多。

4 麦克风阵列实际应用
4.1 麦克风阵列校准
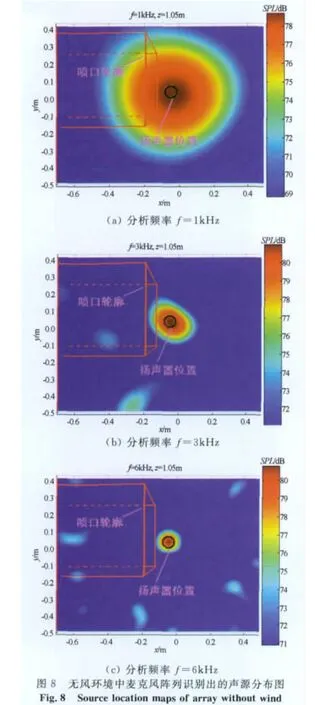
麦克风阵列实际应用时先检验无风环境下麦克风阵列识别声源的能力。无风环境中声源识别试验采用的声源模型为扬声器,安装情况如图7所示。试验时扬声器辐射的声音频率分别为1、3、6kHz。麦克风阵列数据采集频率为16384Hz,采集时间5s。麦克风阵列与扬声器之间的距离为1.05m。数据处理过程中对麦克风阵列采集的数据进行分块,每个数据块包含8192个采样数据。

图7 扬声器在风洞中的安装情况图Fig.7 Speaker mounted in wind tunnel
图8给出了36通道螺旋形麦克风阵列识别出的声源分布图。由图可知,麦克风阵列识别出的声源位置与扬声器的位置基本一致。当声源频率为1kHz时,阵列瓣宽B=1.48×波长=0.5m,麦克风阵列分辨率较低,因此麦克风阵列识别出的声源位置区域较大,分辨率较低,随着频率的增大,麦克风阵列的分辨率增大,但图中出现虚假声源,麦克风阵列的动态范围减小。这与麦克风阵列数值仿真结果是一致的。
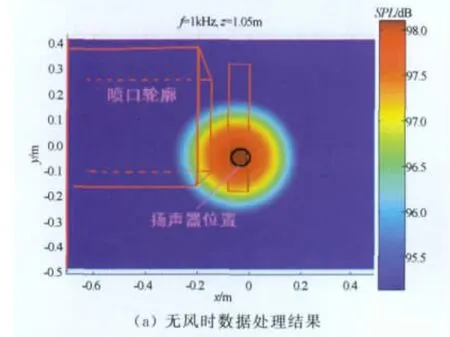
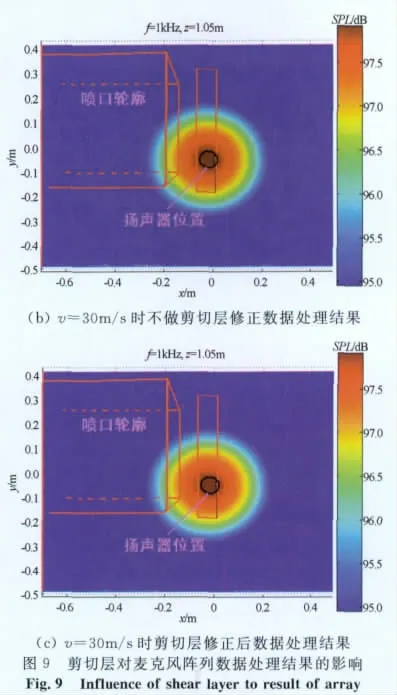
为了进一步考核麦克风阵列识别流场中声源的能力,试验验证了来流条件下麦克风阵列识别声源的能力。声源模型仍然采用扬声器,通过翼型支撑装置固定在风洞射流内部,声源发声频率为1kHz,与麦克风阵列之间的距离为1.05m,数采频率为51200Hz,试验风速为30m/s。图9给出来流条件下风洞射流剪切层对麦克风阵列识别声源效果的影响对比图,由图可知,风洞射流剪切层影响麦克风阵列识别声源的量级,同时对麦克风阵列识别声源的位置有一定影响,采用剪切层修正后,阵列识别声源的位置略有改善,但由于风速较低,风洞射流剪切层对麦克风阵列识别声源的位置影响有限,剪切层对阵列识别出声源的修正量在毫米量级,小于阵列分辨率,麦克风阵列声源分布图中声源位置变化不是特别明显。
4.2 翼型声学试验结果分析
试验翼型为NACA23018翼型,弦长为100mm,试验迎角为0°、8°,试验风速为40m/s。翼型垂直安装,如图10所示,翼型与麦克风阵列平面平行。翼型与阵列平面之间的距离为1.05m。数据采集频率为16384Hz,采集时间为15s。数据处理过程中对麦克风阵列采集的数据进行分块,每个数据块包含8192个采样数据,因此频率分辨率为4Hz。数据处理过程中采用1/3倍频程进行分析。
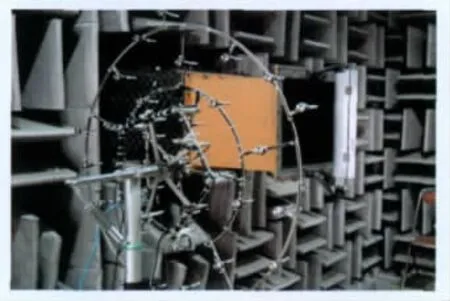
图10 翼型在风洞中的安装情况Fig.10 Wing model mounted in wind tunnel
图11和12分别给出了风速为40m/s,迎角为0°时翼型噪声频谱曲线和声源分布图。由图11可知,频谱曲线上频率为3.3、3.9、5.3kHz处出现峰值。根据背景噪声频谱曲线可知,这些频率的噪声不是风洞背景噪声。图12分别给出这些频率对应的噪声分布图。图中可以明显看到这些频率的噪声出现在翼型后缘,它们是由翼型后缘分离、涡的脱落产生的,属于后缘噪声(TE noise)。

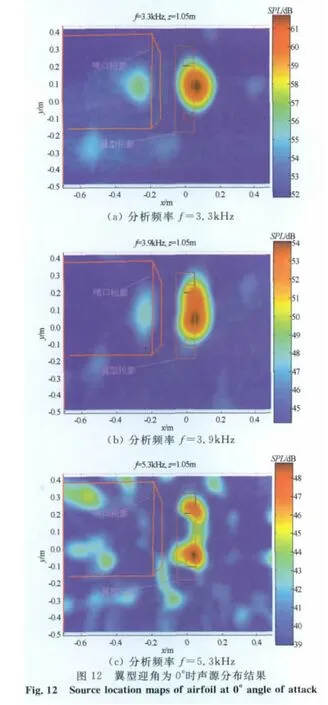
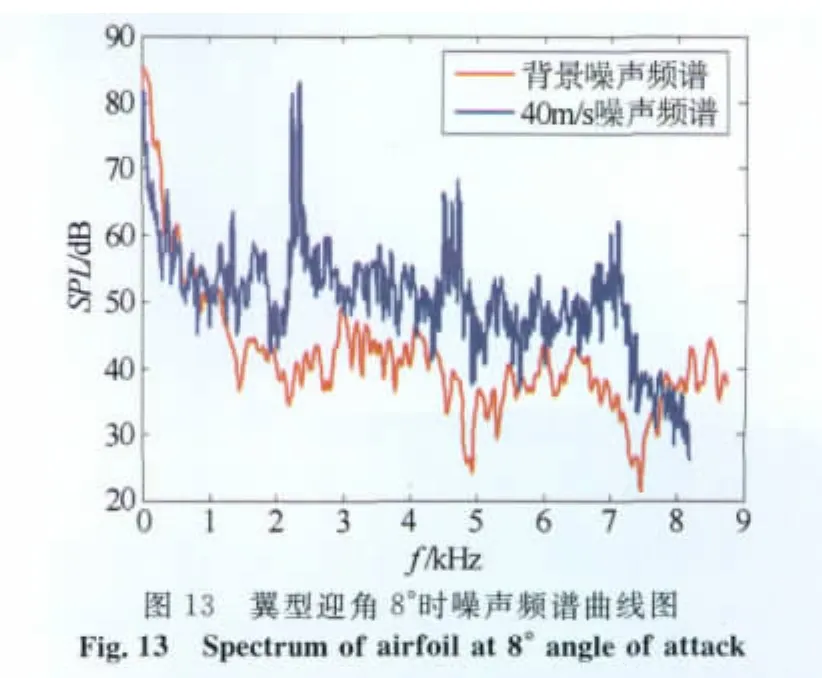

图13和14分别给出了风速为40m/s,迎角为8°时翼型噪声频谱曲线和声源分布图,由图13可知,频谱曲线上在频率为1.4、2.4、3.5kHz处出现峰值。图14给出了这些频率对应的噪声分布图。由图可知,频率为1.4kHz的噪声出现在翼型的表面,可能是由翼面上边界层转捩、边界层分离引起的;而频率为2.4和3.6kHz的声源则为翼型后缘噪声。
5 结 论
麦克风阵列测试技术是现代气动声学风洞试验研究的关键试验技术,通过在0.55m×0.4m声学风洞开展的试验,研究了麦克风阵列数据处理方法和风洞射流剪切层的修正方法,研究结果表明:
(1)风洞剪切层影响麦克风阵列识别声源的精准度,采用剪切层修正方法可以一定程度修正风洞射流剪切层对麦克风阵列测试精准度的影响,但还需研究更加有效的剪切层修正方法;
(2)基于麦克风阵列的数据处理方法可以准确识别出声源位置,可用于声学风洞试验;
(3)翼型声学试验结果表明翼型后缘产生明显的后缘噪声源,它们是由翼型涡的脱落以及边界层分离引起的。
[1] WILLIAM M Humphreys.Design and use of microphone direction arrays for aeroacoustic measurement[R].AIAA 98-0471.
[2] THOMAS J Mueller.Aeroacoustic measurements[M].Springer,2002.
[3] SCHLINKER R H,AMIET R K.Shear layer refraction and scattering of sound[R].AIAA 1980-973.
[4] AMIET R K.Refraction of sound by a shear layer[R].AIAA77-0054.
[5] SODERMAN P T,NOBLE S C.A four-element endfire microphone array for acoustic measure-ments in wind tunnels[R].NASA-TM-X-62-331,1974.
[6] CLIFTON Horne,JULIE A Hayes.Effects of distribution source coherence on the response of phased acoustic arrays[R].AIAA 2000-1935.
[7] GROSCHE R H,SCHNERDER G.Wind tunnel experiments on airframe noise sources of transport aircraft[R].AIAA 1997-1642.
[8] 季建朝,白龙,黄迅.基于状态观测器的波束形成算法及其航空应用[J].航空学报,2011,48(1):35-40.
