约束总体最小二乘在空间后方交会中的应用
2012-03-27刘庆元姜柱
刘庆元 姜柱
(中南大学地球科学与信息物理学院,湖南长沙410083)
1.引言
空间后方交会是以共线条件方程式为基础,将像片的6个外方位元素和地面坐标作为待定值看待。首先传统的方法需要处理大量的三角函数解算,给计算带来不必要的麻烦,文献[3]和[4]利用单位四元素法代替三个旋转角,简化了计算。但是其平差方法通常采用高斯-马尔科夫模型进行求解。该模型仅将非线性函数模型在参数概略值处按泰勒级数展开,忽略高次项使其线性化,因此,必然造成系数矩阵中存在误差。因而,进行平差时必然要考虑到系数矩阵的误差。为了同时考虑系数矩阵和观测值的误差,建立更合理的模型,本文引入了约束总体最小二乘(CTLSE)。该方法可用于解决所谓的变量中的误差模型的估计问题。
2.单位四元数与共线条件方程式
2.1 单位四元素
四元素是一个四元矢量,可用来描述坐标旋转。在三维空间中的单位球上的任意一个位置只对应X轴和Y轴旋转的两个角,但绕Z轴旋转的第三个角却无法描述。这时如果再增加一个自由度就可以表示所有三个旋转角,这样便产生了四维空间的单位球。四维空间的单位球定义如下:三维空间中所有三个旋转角可以通过四维单位球上的点表示,四维单位球上点的四元坐标构成了单位四元数。用单位四元数表示旋转矩阵为:

由于采用单位四元数对共线条件方程式进行描述,描述像片姿态角时不在出现传统的角元素,取而代之的是单位四元素的4个系数q0,q1,q2,q3。对共线方程线性化后得出误差方程式为:


各系数值及常数值见文献[3];

结合单位四元数之间的约束条件方程,经线性化后得到:

采用联系数的直接解法,得到的法方程为:

如此反复趋近,直至每幅影像外方位元素的改正值均小于某个限值时为止,迭代结束。
2.2 约束总体最小二乘(CTLS)
与仅考虑到观测向量L中是含有误差的,而认为系数矩阵A中并不存在误差的最小二乘方法相比,约束总体最小二乘法所关心的是当L和A中都含有误差,同时考虑这些误差时,参数向量x的估计方法。令顾及L和A误差的模型为:

式中,V和EA分别为观测值和系数矩阵元素的随机误差。基于拉格朗日极值的总体最小二乘法,在模型(4)下,总体最小二乘准则可以表示为:

式中,eA=vec(EA),是将误差矩阵EA按列拉直得到的列向量,排列顺序为从左到右。
由此可得模型(4)在准则(5)下的拉格朗日极值函数为:

式中,⊗是表示Kronecker积,EAx=(xT⊗In)eA
对式(6)求偏导得到拉格朗日条件为:
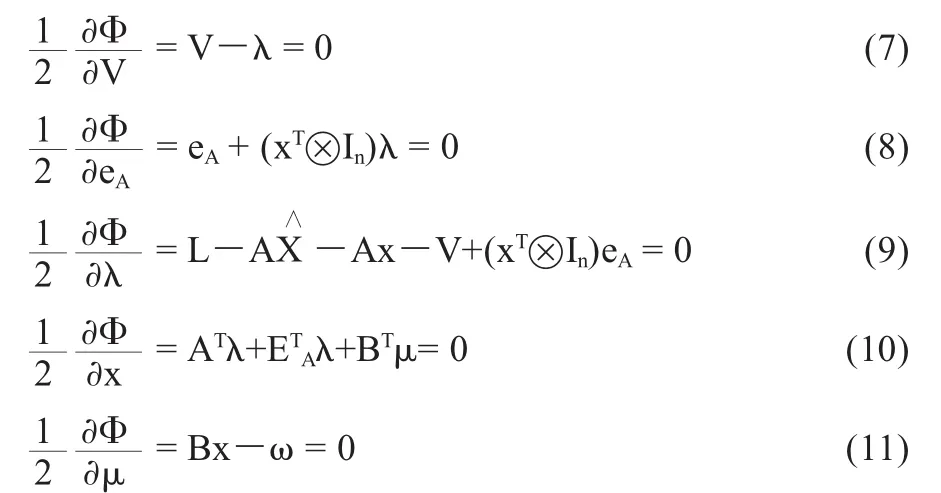
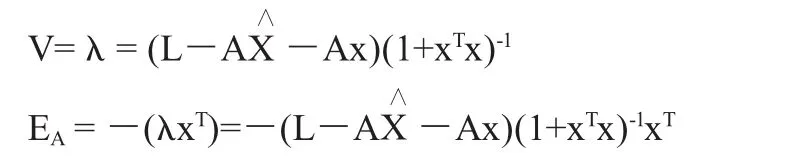
由式(7)和式(9)得

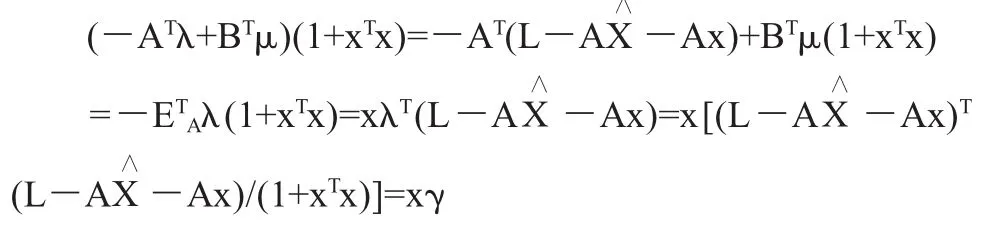
将式(12)代入式(7)和式(8)得,
从而得到:
因此,约束总体最小二乘问题的迭代解法为:
第一步:
令γ(0)=0,μ(0)=0;

第二步:

如此反复迭代,直至满足要求为止。
参数精度为:

3.计算步骤及实例分析
3.1 计算步骤
(1)给定初始值,设K为任意两点求得的摄影比例尺分母;


(2)代入式(1)和(2)组成误差方程式;
(3)根据式(13)到(15),直接求得参数的CTLS解,从而求得外方位元素;
(4)利用约束总体最小二乘法对平差结果进行精度评定。
3.2 实例
本文引用文献[9]中得数据,像片的内方位元素为已知,x0=0,y0=0,f=153.24mm,表1为四个控制点的像片坐标和地面坐标;分别由最小二乘和CTLS方法得到的外方位元素和单位权中误差以及参数的中误差见表2。
系数矩阵的残差矩阵为:EA=10-6


表1 像点坐标和控制点坐标

表2 两种平差方法的比较
4.结论
(1)采用单位四元素描述的平差模型与传统方法相比,单位四元素利用四个独立的量代替三个旋转角度,在实际计算时避免了频繁的三角函数运算,简化了运算过程,提高了效率。
(2)约束总体最小二乘(CTLS)不仅考虑了观测值L所含有的误差,同时也考虑了系数矩阵A所含有的误差,数学模型与实际情况更加吻合,同时求得到的单位权中误差和参数的中误差都要比传统的最小二乘计算的结果小,得到的计算结果精度更高。
[1] 张广军.视觉测量[M].科学出版,2008.
[2] 王之卓.摄影测量原理[M].武汉大学出版社,2007.
[3] 王勇,姜挺,江武刚等.基于单位四元素描述的单像空间后方交会[J].测绘科学技术学报,2007,24(2).
[4] 曾卓乔.一种不测定初始值的近景摄影测量微机程序[J].测绘学报,1990(4).
[5] Burkhard Schaffrin,Andreas Wieser On weighted total least-squares adjustment for linear regression 2008,(82):415-421.
[6] 陈玮娴,袁庆,陈义.约束总体最小二乘在点云数据拼接中的应用[J].大地测量与地球动力学,2011,31(2).
[7] 王娟,陈安平.总体最小二乘问题解算的两种方法比较分析[J].测绘信息与工程,2010,(6).
[8] 陆钰,陈义,郑波.总体最小二乘方法在三维坐标转换中的应用[J].大地测量与地球动力学,2008,28(5).
[9] 陈义,陆钰,郑波.总体最小二乘方法在空间后方交会中的应用[J].武汉大学学报信息科学版,2008,33(12).
[10] 彭天强,张文林,常宁.高精度参数估计问题[J].数学的实践与认识,2007,37(14).
