一种基于Matlab的模糊控制系统优化设计方法
2012-02-26刘亮
刘 亮
(海军装备部,西安 710025)
模糊控制是基于规则的一种智能控制方式,它不依赖于被控对象的精确数学模型,特别适用于多输入-多输出的强耦合性、参数的时变性和严重的非线性与不确定性的复杂系统。且控制方法简单,实际效果好。其实质是对人观察、思考、判断、决策的思维过程的一种模拟,模糊控制器的设计在很大程度上依赖于设计者的经验,带有主观性[1]。因此,需要对控制器进行优化才能取得较为满意的设计效果。
Matlab软件是由美国Math Works公司推出的专门用于科学、工程计算和系统仿真的高级语言,它集数值分析、矩阵运算、信号处理和图形显示于一体,并且提供了大量应用于不同学科的工具箱,编程效率高,使用简单方便。特别是Simulink工具箱和FUZZY工具箱使得控制系统的设计与仿真变得相当容易和直观。本文在Matlab6.5的基础上介绍了如何构造模糊控制系统的结构框图和进行仿真研究,对某火炮调速系统的控制器进行设计仿真,提供了一种模糊控制系统的高效仿真方法。
1 基于Matlab的模糊控制仿真系统的设计
模糊控制系统设计的关键是模糊控制器的设计,其参数主要有:各输入、输出变量模糊子集的隶属度函数,模糊控制规则,输入输出变量的比例变量因子等。偏差和偏差变化作为模糊控制器的两个输入量,先对它们进行模糊量化处理,得到模糊变量E和EC,按模糊控制规则进行模糊决策,得到模糊控制量U,再经过解模糊和比例变换得到实际控制量输出。
1.1 模糊控制器的设计
在Matlab中,可以借助于模糊系统工具箱的图形用户界面(GUI)工具编辑隶属度函数和控制规则,这里以某火炮调速系统的开环传递函数作为设计控制器以及仿真的基础。
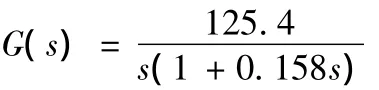
设控制系统的输入为单位阶跃信号r,输出为y,误差为e,误差导数为de;模糊控制器的输入为e、de,其输出为u,所对应的模糊语言变量为E、DE和U,其论域范围均取[-6,+6],模糊子集均为{NB,NM,NS,ZO,PS,PM,PB}。控制规则是对专家的理论知识和经验的总结,此处共有49条规则,如表1所示。在RulesEditor窗口中输入这49条控制规则[2]。例如:If E is NB and DE is NB then U is PB。
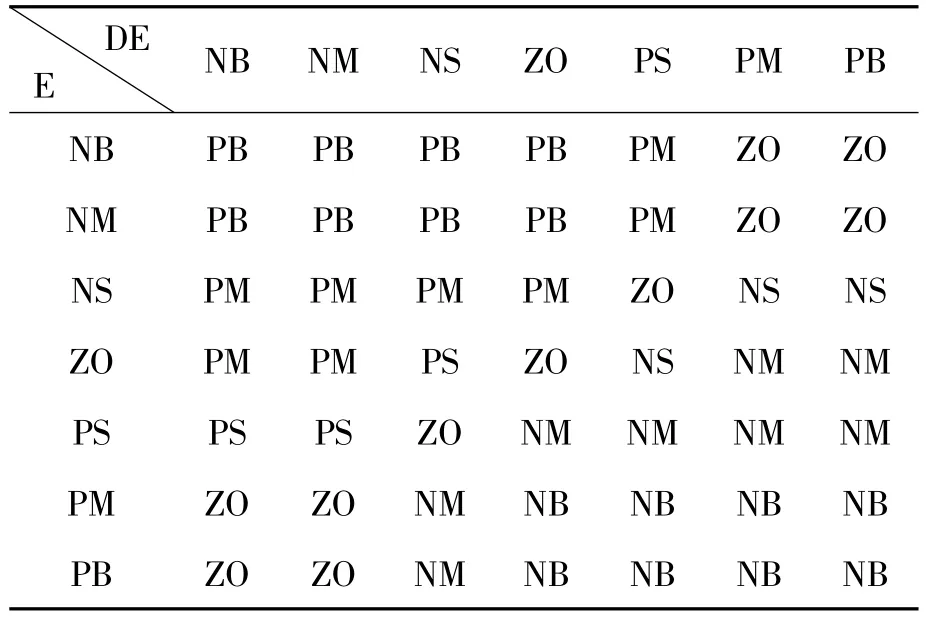
表1 模糊控制规则
在Matlab中键入FUZZY,进入模糊编辑窗口FISEDITOR。建立E、DE、U的隶属度函数,有三角形、高斯形、梯形等11种可供选择,在此选用常用的三角形隶属度函数,如图1所示。
模糊决策采用与方法为min,或方法为max,推理方法为min,合成方法为max,解模糊化方法为重心法(centroid)。建立的FIS文件取名为aa.fis.如此设计的模糊控制器的输入与输出的关系曲线如图2所示,显然模糊控制是一种非线性控制。
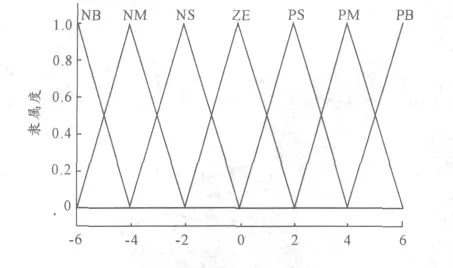
图1 E/DE/U的隶属度函数
1.2 Simulink仿真模型的建立
Simulink工具箱是Matlab软件的扩展,主要用于动态系统的仿真.Simulink模块库中提供了建立系统模型所需的大部分模块,进入Matlab环境后,键入Simulink命令就可打开该模块库,用户可以根据自己的系统选择所需的模块,用鼠标将其拖至自己的系统模型中,其中在模糊控制工具箱中有一个模糊控制器模块(Fuzzy Logic Controller),将这些模块连接起来构成系统结构图.双击各个模块输入相应的参数,其中模糊控制器的结构变量取aa,连接好各模块,就构成了图3所示的系统的Simulink描述.系统的模型建好后,用户可以根据系统的不同需要,设置或更改模块的参数,然后打开仿真菜单设置仿真参数,启动仿真过程[3].这里仿真时间设置为 10 s,采样周期设置为 0.01 s。
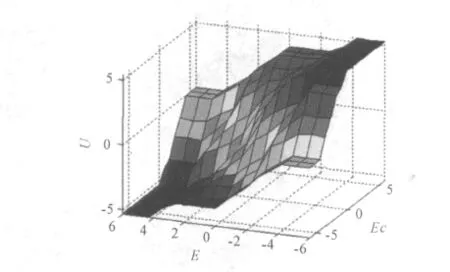
图2 模糊控制器的输入输出曲线
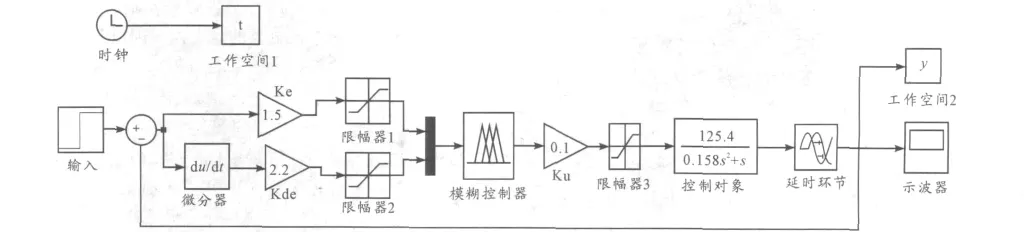
图3 模糊控制系统仿真框
2 模糊控制系统的优化
上述模糊控制器是在特定的条件下设计的,其参数ke、kde、ku及其控制规则是根据经验确定的,一般情况下这些参数不会是最佳值。量化因子ke、kde的大小对控制系统的动态性能影响很大。ke选得大时,系统的超调也较大,过渡过程较长,但可以使上升时间变短;kde选择较大时,系统超调较小,但系统的响应速度变慢,ke、kde两者之间也相互影响。ku选择过小会使系统动态过程变长,过大又会导致系统震荡加剧[4-5]。
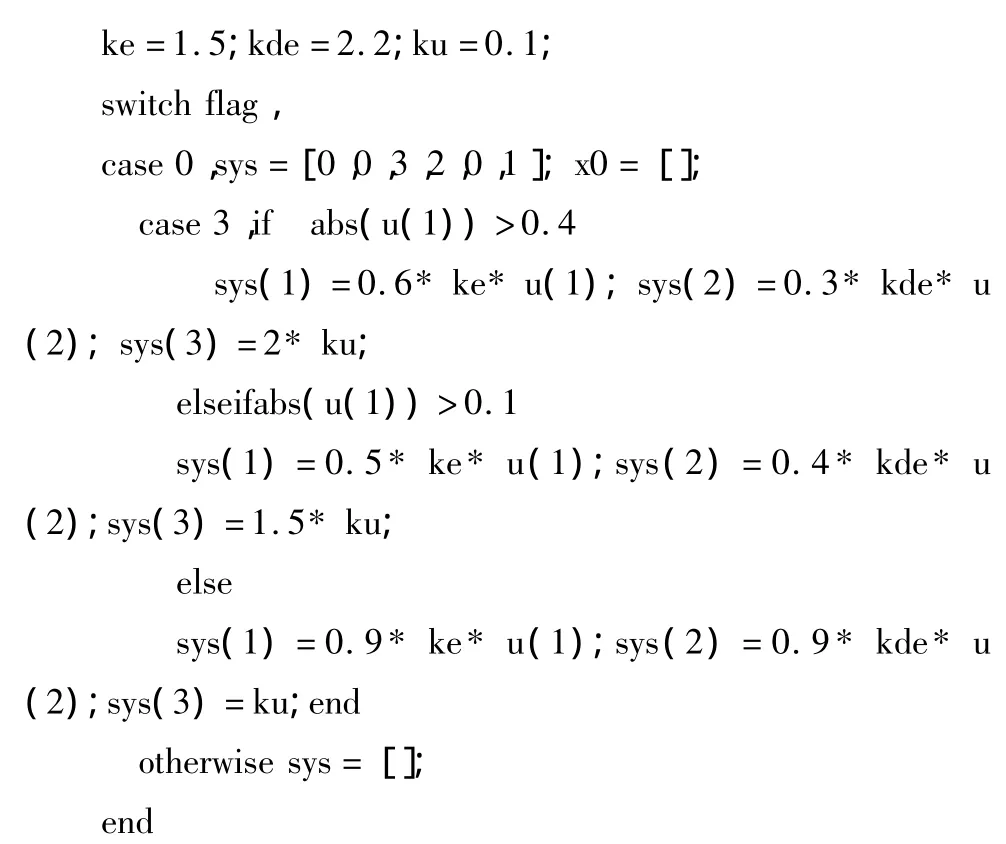
S函数是扩展Simulink功能的有力工具,给用户提供编写复杂函数、创建系统未提供的模块功能。在此编写M文件的S函数,对ke、kde、ku进行自调整,优化控制效果。另外引入一个Ⅰ型积分环节用来消除固有的静态误差,编写的S函数如下:
将编写的S函数存盘为s1.m文件,按图4(a)创建子系统,并对其封装,如图(b)。重新构建的模糊控制系统结构框图如图5所示。
对上述2种模糊控制系统框图运行仿真后得到图6所示结果,很显然,参数调整时的仿真结果优于参数固定时的结果。
3 结束语
本文基于Matlab软件,采用模糊控制的图形用户界面(GUI)创建模糊控制器,应用Simulink构造模糊控制的系统结构框图进行仿真,减少了编程工作量,而且形象直观、方便快捷。另外编写了S函数,根据误差大小实现参数自调整,通过引入一个Ⅰ型积分环节用来消除模糊控制固有的静态误差,同时,改善了模糊控制的控制效果。
[1] 楼顺天,胡昌华,张伟.基于Matlab的系统分析与设计——模糊系统[M].西安:西安电子科技大学出版社,2001.
[2] 张葛祥,李娜.Matlab仿真技术与应用[M].北京:清华大学出版社,2003.
[3] 李祖欣.Matlab在模糊控制系统设计和仿真的应用[J].系统仿真学报,2003(1):132-134.
[4] 宋哲英,宋雪玲,刘朝英.应用Matlab设计模糊控制系统[J].计算机应用研究,2001(2):69 -71.
[5] 侯北平,卢佩,陈锋军.Matlab下模糊控制器的设计与应用[J].测控技术,2002(10):40-42.
(责任编辑周江川)
