基于运动控制器的数控试验平台设计
2012-02-20何苗
何苗
(四川信息职业技术学院,四川 广元 628017)
机电一体化产品质量和技术水平的高低,已是当今世界衡量一个国家实力和国际地位的重要标志,运动控制器及其相关技术是各类机电一体化产品的核心技术,本课题的目的是通过对GT400运动控制器的二次开发,利用其提供的基本功能完成基于PC机的实验数控工作台设计。

图1 硬件组成框图
1 机电传动系统设计
1.1 机械传动部分
机电传动系统的设计一般由动力源、变速机构、换向机构、运动分配机构、执行件等组成。常用的机械传动部件有螺旋机构、齿轮传动、同步带以及各种非线性传动部件,其主要目的是传递转矩与转速。该系统动力源采用VRDM397/LHA型步进电机;换向机构采用型号为FYC2D2504-3的滚珠丝杠,固定方式为一端固定,一段有隙,其优点在于压杆稳定和临界转校高,而且丝杠有热膨胀的余地。支承形式采用7603020TVP60接触角角接触球轴承一对,背靠背组合的形式。滚动直线导轨副时在滑块与导轨之间放入适当的钢珠,使滑块与导轨之间的滑动摩擦变为滚动摩擦大大降低二者之间的摩擦阻力,有助于提高数控系统的相应度与灵敏度。因此在x、y向用滚动导轨副,型号为HJG-D25.
1.2 电器部分设计
伺服驱动部件是数控系统中与机械直接有关的部分,它们的性能决定了机床的本控制特性,所以正确合理的选择可靠的伺服驱动部件对提高产品的功能起着决定性的作用。
步进电机是将电脉冲信号转换成机械角位移的执行元件,其特点是:步进电机的工作状态不易受各种干扰因素的影响,只要他们的大小未引起步进电机产生丢步现象之前,就不影响其正常工作:控制性能好。在启动停止反转时不易丢步。因此步进电机被广泛应用于开环结构的机电一体化系统,使系统简化,并可靠的获得较高的位置精度。动力源采用VRDM397/LHA型步进电机。步进电机不能直接接到交流电源上工作,需要有步进电动机驱动电源。步进电机及其驱动电源是一个有机整体,步进电机运行性能是步进电机和驱动电源两者的综合效果。
步进电机驱动器采用雷塞535型驱动器。该驱动器内部采用类似伺服控制原理的电路,此电路可以使电机低速运行平稳,几乎没有震动和噪音,电机在高速时力矩大大高于二相和五相混合式步进电机,定位精度最高可达30 000步/转。
2 检测部分的设计
本次设计的工作台要求进行往复运动加工产品,在工作台达到极限位置时,必须自动停下来。另外机械原点是数控工作台所有坐标系的基准点,机械原点的稳定性是该工作台的一个极为重要技术指标,也是加工文宁的一个最基本的保证。像这一类的行程控制可以利用行程开关来实现。
电感式接近开关属于一种有开关量输出的位置传感器,当金属在接近时,使物体内部产生涡流。这个涡流反作用于接近开关,是开关内部电路的参数产生变化,由此识别出有无金属物体接近,进而控制开关的通和断完成无接触检测物体的目的。
根据工作台精度要求及尺寸选型号为JG35L-F15TB,尺寸大小为35×33×70 mm的电感定位开关作为该数控工作台的检测原件。
3 故障诊断设计部分
随着现代工业和科学技术的迅猛发展,现代机械设备本身的结构越来越复杂,功能越来越完备,自动化程度也越来越高。机械设备的故障诊断技术越来越受到重视,如果某台设备出现故障而又未能及时发现和排除,其结果不仅会导致设备本身损坏,甚至可能会给生产和质量以至人们的生命财产安全造成难以估计的严重后果。
为适应试验台的工作要求将诊断部分的设计分为通讯出错;命令错误;圆弧插补半径不正确;直线插补长度为零或超出控制器处理范围等几块,适合教学要求。
对于用户通过主机发出命令,运动控制器在检查校验后会给出一个反馈,这个反馈就是命令(库函数)的返回值。根据返回的值在界面上显示相应的故障原因。比如,返回值为-1时,显示通讯出错;返回值为0时,显示命令执行成功;返回值为1时,显示命令错误;此时调用GT-Get(mdstsc)命令,进一步确定出错原因,显示在命令出错函数的下一行,当出现命令错误时,通过判断命令错误寄存器中的位,把可能引起命令错误的原因显示在界面上。
(2)根据返回的值在界面上显示相应的故障原因。返回值为-1时,显示通讯出错;而且重复调试用该命令多次仍返回-1,说明运动控制器的通讯出现故障,运动控制器没有正确的接受主机命令;或是运动控制器的软件运行不正常;不能正确处理主机命令;此时应停止程序运行。此时于诊断界面上显示“通讯出错”。框图如图2:

图2 运动框图
(2)如果该命令是单轴运动命令出错,将引起当前轴运动状态字的Bit7的置位。同时运动控制器的命令状态积存器提供命令出错的详细原因,主机可通过调用命令GT-Get(mdstsc)得到命令出错的详细原因。返回值1表示当前轴状态积存器的位置捕获完成标志为1,或已经设定了GT_CaptIndex(GT_CaptHome)命令但位置尚未捕获到时主机又发送了GT_CaptIndex命令。框图如图3:

图3 运动框图
(3)系统仿真界面如图4所示:
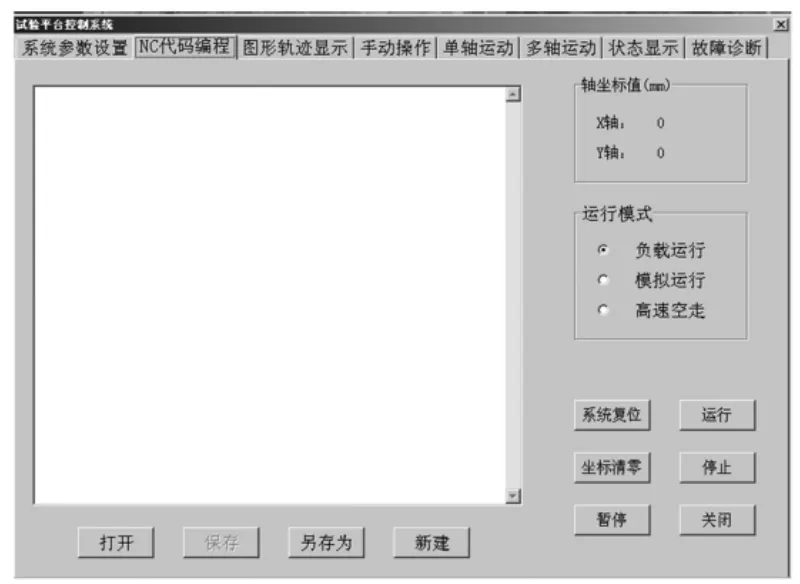
图4 系统界面
4 结论
数控系统正朝着开放式、高精度、高速度、智能化、简单化方向发展。作为一个具有开放式结构的数控工作台,它为用户提供了一个高度柔性的控制平台,既允许用户利用运动控制器提供的底层运动函数库进行电机运动规则和控制方面的教学实践,也允许用户利用G代码进行开放式数控系统的教学和研究,是高等工科院校机电一体化,自动控制等专业以及相关院校理想的数控教学实验设备。
[1]固高科技有限公司.GT系列运动控制器编程手册[M].2006.
[2]严爱珍.机床数控原理与系统[M].北京:机械工业出版社,2004.
[3]陈子银.数控机床结构原理与应用(第2版)[M].北京:北京理工大学出版社,2009.
[4]冯 浩,汪建新,赵书尚.机电一体化系统设计[M].武汉:华中科技大学出版社,2009.
[5]李颖卓,张波,王茁.机电一体化系统设计(第2版)[M].北京:化学工业出版社,2010.
[6]文怀兴,夏 田.数控机床系统设计(第2版)[M].北京:化学工业出版社,2011.
