基于电压扫描和电导增量法的局部遮荫条件下多峰MPPT方法
2012-02-08张渊明孙彦广张云贵
张渊明,孙彦广,张云贵
(混合流程工业自动化系统及装备技术国家重点实验室,北京市, 100071)
0 引言
光伏阵列在使用过程中并非时刻工作于理想状况,受灰尘、树木、建筑甚至云层等影响,阵列经常受到非均匀的辐射,产生局部遮荫情况。由于光伏阵列本身对环境辐射、温度具有强非线性特性,一旦产生局部遮荫的状况,其工作特性会变得更加复杂。常见的最大功率点跟踪(maximum power point tracking,MPPT)方法,如扰动观察法(perturb and observe,P&O)、电导增量法(incremental conductance,INC)和恒压(constant voltage,CV)法等[1-5]将无法有效追踪最大功率点,导致整个光伏系统的效率下降,有些情况下功率损失高达70%[6]。
针对局部遮荫的情况,文献[7-8]提出采用粒子群算法和遗传算法,这2种方法不仅具有收敛性问题,在参数的选择和对控制器性能的要求方面也限制了其应用;文献[9]采用了模糊逻辑控制,该算法同样对控制器性能的要求较高,同时需要大量的实际经验来确定控制规则;文献[10-11]采用了较为复杂的控制方法,在实际的控制中难以实现。
本文建立了局部遮荫条件的光伏(photovoltaic,PV)阵列模型,分析了传统MPPT方法在局部遮荫条件下的局限性,从寻找全局最优值的思路出发,先通过1个扫描电压找出最大功率点的大概位置,再以此为初始条件结合传统的INC方法找出其较为精确的位置,从而实现局部遮荫条件下最大功率点的跟踪。
1 局部遮荫条件下的PV阵列特性
PV阵列本身由多个基本光伏模块单元串并联组成,在辐射均匀的条件下,其输出的功率电压曲线仅有1个峰值,然而在实际应用中,受灰尘、树木和建筑等因素的影响,PV阵列常处于光照不均匀的工作环境。由于光伏电池本身与环境温度和辐射强度之间具有强非线性,在局部遮荫条件下其工作特性复杂,功率电压曲线出现多个峰值,电流电压曲线呈分段形式。单个光伏电池的近似等效电路模型如图1所示。
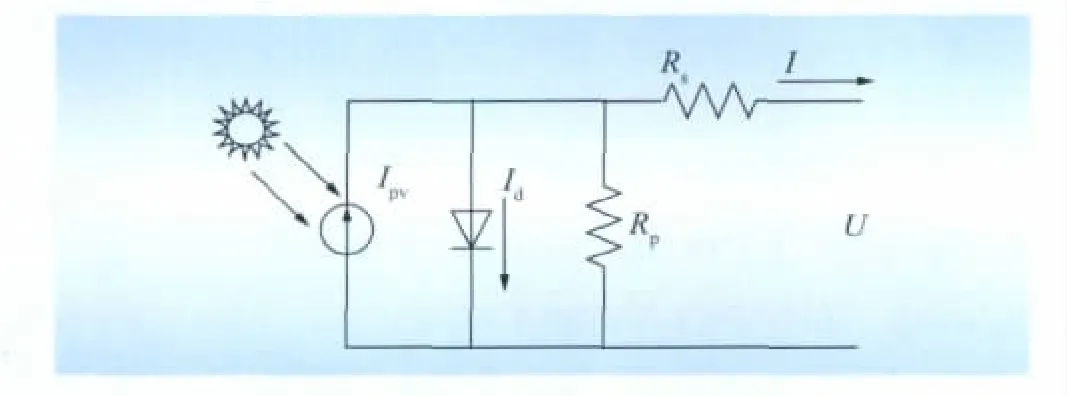
图1 光伏电池近似等效电路模型Fig.1Approximate equivalent circuit model of PV cell
功率电压和电流电压关系[12]为

式中:Ipv为光生电流;Id为二极管反向电流;Rs为光伏电池串联电阻;Rp为光伏电池旁路电阻;I0为P-N结反向饱和电流;q为电荷量;a为二极管理想常数;k为波尔兹曼常数;T为P-N结温度;标准工作情况下环境温度为25℃,辐射为1 000 W/m2。
由于功率电压和电流电压之间的关系方程均为超越方程,可以采用牛顿迭代法[13]求出其近似解。以30 kW阵列为例,在不同均匀辐射条件下的P-U、I-U特性曲线如图2所示,P-U曲线在不同的均匀辐射条件下呈现单峰特性。

在非均匀辐射条件下,组成阵列的各个模块由于辐射的不同,产生的光生电流大小也不同。光生电流较小的模块会成为与其串联的光生电流较大模块的负载,从而导致被遮挡模块发热,甚至烧毁电池板,这就是所谓的热斑效应[14]。为避免电池板的损坏、延长工作寿命,常采用并联旁路二极管的方法,通过二极管的分流作用来保护电池板,如图3所示。未遮挡模块的光生电流为I,受遮挡模块的光生电流为I0,I>I0,因此受遮挡部分的二极管分流I1,最终作用结果为I=I0+I1。辐射的不同使各模块的特性曲线也发生了变化,各模块的特性曲线不再相同,叠加后PU曲线产生多峰值,I-U曲线呈分段形式。若有多个串并联,则还要在各串之间串联二极管以防止逆电流的产生[15]。以30 kW阵列为例,局部遮荫条件下其P-U和I-U特性曲线如图4所示。此模型忽略了二极管的损耗及串联组建的失配因素[16],但误差在工程允许的范围之内,因此可以用来模拟非均匀辐射的情况。

图4 非均匀辐射条件下PV阵列P-U、I-U特性Fig.4P-U and I-U characteristics of PV array under non-even radiation condition
2 传统方法在局部遮荫条件下的局限性
常用的MPPT算法都是基于PV阵列P-U特性曲线的单峰值特性,P&O法和INC法的基本原理都是通过比较功率的大小来改变扰动方向,以INC法为例来说明其在多峰特性下跟踪最大功率点的局限性:在仿真或实际应用中,为了增加系统的稳定性,判断条件中的0值常取1个小的阈值;遮荫情况出现时,产生如图5所示的多峰特性,其中A点为全局最大功率点,B点为局部最大功率点;如果初始条件位于A点左右连续的可导区域内,则可以追踪到最大功率点;如果初始条件位于B点左右连续的可导区域,因步长无法跨越ΔU,会陷入伪最大功率点B,相当于陷入了局部极值;而实际工作中无法准确预测峰值的位置,初始条件也常为1个固定值,因此,一旦初始值不在最大功率点附近则搜索失败。

图5 INC方法在多峰特性下失去作用示意图Fig.5Schematic diagram of losing function of INC method in multi-peak conditions
3 基于VS和INC的MPPT方法设计
局部遮荫条件下的多峰值特性可以抽象为多极值问题求最值的数学模型,现有针对多极值问题求最值的方法大多数有1个目标函数,基于此函数在某一范围内先求出所有极值,再通过比较求出最值。局部遮荫条件下的光伏电池PV特性与此不同之处在于遮荫情况无法预知,遮荫发生后电池无法得出具体的数学模型,从而目标函数无法确立。
考虑到电压、电流采样的实时性,可以设想给电池板提供1个一定范围的扫描电压Uset,通过检测输出电流I,计算电池板的输出功率P,比较后即可得到最大功率点。此方法的问题在于如果扫描步长ΔU过大,将无法准确找到最大功率点,只能在其附近摆动;扫描步长ΔU过小则检测时间较长、功率损失较大。基于上述考虑,本文采用一种折中的方法,先通过较大步长的扫描电压ΔU找出最大功率点附近的某点,然后通过INC方法以此点为初始条件进行搜索,最终得到最大功率点的位置。
此方法的优点在于既可以通过大步长的扫描电压确定最大功率点附近的一点,减少搜索时间,又可以利用INC方法精度高的特点准确定位最大功率点。
4 仿真结果及分析
利用Matalb/Simulink工具箱建模进行算法验证。实验中采用的光伏电池功率为30 kW,为检验算法,电池开路电压设置为820 V;跟踪算法中电压扫描阶段的扫描电压步长为5 V,扫描范围为0.1~800 V,电导增量法的基本步长为0.5 V。仿真以2峰值模型为例,2种辐射强度分别设置为1 000和500 W/m2。

图6 局部遮荫条件下光伏阵列输出功率Fig.6Output power of PV array under partially shaded conditions
局部遮荫条件下的PV阵列输出功率如图6所示,由图6可见,输出功率电压曲线有2个峰值,14.97 kW为局部最大功率点,若系统稳定在此点,则输出并非当前条件下的最大功率;真正的最大功率点约在16.27 kW处,此时输出电压值约为692.7 V。
算法运行过程中阵列输出电压的变化如图7所示。由图7可知,扫描结束后返回电压约为695.6 V,而非局部最大功率点对应的电压值328 V附近,避免了陷入局部极值。以此电压作为电导增量法的初始值继续进行搜索,最后稳定在692.1~693.1 V之间,在图6所示的最大功率点电压在692.7 V附近。搜索过程中相应的输出电流的变化如图8所示。

输出功率的变化如图9所示,扫描结束后返回的最大功率为16.26 kW,近似对应于返回的电压值695.6 V。最终的输出功率稳定在16.27 kW附近,与图6对比可知,所述算法很好地跟踪了最大功率点。
综上所述,在局部遮荫条件下,基于电压扫描和电导增量法的MPPT方法不仅可以避免陷入局部极值,有效地跟踪最大功率点,而且具有较高的搜索精度和较快的搜索速度。
5 结论
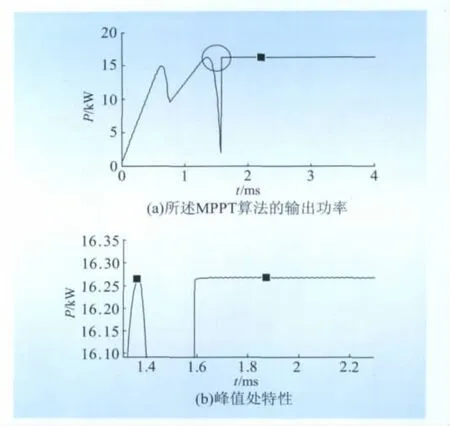
图9 所述算法的输出功率Fig.9Output power using described algorithm
本文提出的局部遮荫条件下MPPT算法先采用较大步长的扫描电压进行比较搜索,不仅可以确定最大功率点所在的单峰位置,而且具有较高的搜索速度;在初步确定最大功率点的位置后,采用精度和速度都较高的变步长INC方法,能够快速准确地搜索到最大功率点。该方法可以有效避免局部遮荫条件下最大功率点追踪陷入局部极值,减小功率损耗,而且适用于均匀辐射的情况,由于初期采用了大步长的搜索电压,其追踪速度远大于只采用电导增量法的最大功率点追踪方法。扫描范围和扫描步长对于搜索速度和精度具有直接影响,因此对于二者的取值需要进一步研究,最佳情况是使搜索速度和精度达到均衡以满足使用要求。
[1]李东辉,王鹤雄,朱晓丹,等.光伏并网发电系统几个关键问题的研究[J].电力系统保护与控制,2010,38(21):208-213.
[2]孙自勇,宇航,严干贵,等.基于PSCAD的光伏阵列和MPPT控制器的仿真[J].电力系统保护与控制,2009,37(19):61-64.
[3]Fenia N,Petrone G,Spagnuolo G,et al.Optimization of perturb and observe maximum power point tracking method[J].IEEE Trans Power Electron,2005,20(4):963-973.
[4]Hussein K H,Muta I.Maximum photovoltaic power tracking:An algorithm for rapidly changing atmospheric conditions[C]//Proc Inst Electro Eng Generation Transmission Distribution,Janpan,1995:59-64.
[5]Masoum M A S,Dehbonei H,Fuchs EF.Theoreticaland experimental analyses of photovoltaic systems with voltage and currentbased maximum power point tracking[J].IEEE Trans Energy Convers,2002,17(4):514-522.
[6]Faranda R,Leva S,Maugeri V.MPPT techniques for PV System: energetic and cost comparison[C]//Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century,US,2008:1-6.
[7]Kondo,Phimmasone Y,Miyatake V.Verification of efficacy of PSO-based MPPT for photovoltaics[C]//Electrical Machines and Systems (ICEMS),2010 International Conference,US,2010:593-596.
[8]肖俊明,王东云,李燕斌,等.基于遗传算法的占空比扰动法在MPPT中的应用研究[J].电力系统保护与控制,2010,38(15): 43-46.
[9]Senjyu T,Arashiro T,Uezato K.Maximum Power Point Tracking Control of Photovoltaic Array under partial Shading Conditions[C]// Proc of the Tenth Annual Conference of Power&Energy Society,Japan,1999:1-4.
[10]Kuo Y,Liang T,Che J.Novel maximum power point tracking controller of photovoltaic energy conversion system[J].IEEE Trans Power Electron,2001,48(3),594-601.
[11]Solodovnic E V,Liu S,Dougal R A.Power controller design for maximum power tracking in solar installations[J].IEEE Trans Power Electron,2004,19(5):1295-1304.
[12]Marcelo G V,Jonas R G,Ernesto R F.Comprehensive approach to modeling and simulation of photovoltaic arrays[J].IEEE Trans Power Electron,2009,24(5):102-108.
[13]茆美琴,余世杰,苏建徽.带有MPPT功能的光伏阵列Matlab通用仿真模型[J].系统仿真学报,2005,17(5):1248-1251.
[14]Peter A.Danger of Hot Spot by Shunt Controllers[C]//The 8thChina PV Conference,Shenzhen,2004:534-535.
[15]王军,王鹤,杨宏,等.太阳电池热斑现象研究[J].电源技术应用,2008,11(4):48-51.
[16]刘素梅.光伏方阵失配现象研究[D].汕头:汕头大学,2008.
(编辑:张磊)
