自动导航探测机器人设计
2012-02-06杨久红王小增李明庭刘祖强黄泽鹏
杨久红 ,王小增 ,2,李明庭 ,刘祖强 ,黄泽鹏
(1.嘉应学院 电子信息工程学院,广东 梅州514018;2.西北工业大学 航空学院,陕西 西安 710072)
在对人类具有威胁、环境恶劣的场合中,移动机器人发挥着重要的作用。目前国内外研制的机器人驱动方式以轮式或履带式居多,在爬越坡面、跨越障碍、壕沟以及在湿地、碎石路面、泥泞地面上行走时,履带式机器人具有一定的优越性[1-3]。定位和导航技术是移动机器人的关键技术,移动机器人必须准确获取自身位置信息以有效完成指定功能。采用差分GPS系统或者惯性制导系统可以实现精确的定位和导航,但成本高昂,目前多用于军事、航空航天等关键领域[4-5]。低成本的定位导航技术仍然是阻碍移动机器人推广应用的瓶颈。本文设计并制作的机器人可以解决此问题。
1 工作原理

GPS自动导航探测机器人总体原理框图如图1所示,是以履带式移动机器人作为机器人底盘,利用机器人的行驶功能并加以改造。在机器人上搭载GPS、电子罗盘、温湿度传感器作为信息采集单元;搭载红外传感器与驱动电路作为机器人控制单元。信息采集单元与机器人控制单元都由单片机实现。LabVIEW编写的上位机程序构成了导航计算单元,通过无线通信模块与信息采集单元、机器人控制单元形成一个自动导航探测系统,机器人上载有数字摄像机,可以对机器人周围环境进行直观地探测。
2 硬件电路设计
GPS自动导航探测机器人硬件电路包括车载的信息采集单元电路、控制单元电路以及上位机无线数据收发电路。硬件电路的主要功能是将采集数据发送给上位机;接收来自上位机的数据控制自动导航机器人的运行。
2.1 信息采集单元电路
本设计采用WGS84坐标系统,定位采用绝对定位法[6]。方位角的获得采用GY-26平面数字罗盘模块,此罗盘以 RS232协议与其他设备通信,具有重新标定的功能,能够在任意位置得到准确的方位角,其输出的波特率为 9 600 b/s,具有磁偏角补偿功能,可适应不同的工作环境[7]。
采集单元电路使用两块单片机作为信息采集处理器,如图2所示。一块为STC89C52,作从处理器,用于对GPS传来的多种NMEA语句中“GPRMC”语句的提取,并把数据发送到主单片机串口2的接收口,以及对温湿度传感器DHT11的数据进行采集;另一块为STC12C5A60S2双串口单片机,串口1用于对电子罗盘的控制与信息获取,串口2的发送口用于对从机上传的“GPRMC”语句再次筛选以及把所有信息(经度、纬度、速度、方位角、湿度、温度)打包后通过无线通信模块APC220发给上位机。同时将经纬度、时间、方位角在LCD12864液晶屏上显示出来。
2.2 控制单元电路


控制单元采用STC89C52作为处理器,如图3所示。机器人通过数据无线接收模块APC220接收上位机发来的角度和距离数据,并将数据由字符型转换成整型,执行相对应的动作,达到对机器人的比例控制,向目标点前进。单片机的I/O口接驱动电路的输入端,在L298的两个使能端的控制下,机器人直流电机可以正转和反转,从而使机器人前进、后退、左转与右转。机器人驱动部分采用的L298N是专用驱动集成电路,其输出电流为2 A,最高电流为4 A,最高工作电压为50 V。机器人采用的电机工作电压为7.2 V,工作电流为160 mA~180 mA。
避障功能采用红外传感器实现,传感器集发射器和接收器于一体,DATA端接单片机的I/O口,单片机通过扫描I/O口可以判断前方是否有障碍物。当有障碍物时,物体将发射器发射足够量的光线反射到接收器,接收器即产生了开关信号,信号线低电平输出,正常状态是高电平输出。检测有效距离为0 cm~80 cm,自动避障后,继续按照原来的路径前进。
2.3 上位机无线收发单元电路
上位机无线收发单元由电平转换芯片MAX232以及无线收发模块APC220构成。APC220接收GPS自动导航探测机器人采集的GPS信号,经过MAX232芯片把TTL电平转换成PC端能识别的232电平。上位机根据收到的GPS信号为GPS自动导航探测机器人规划好路径,通过无线收发模块APC220,向GPS自动导航探测机器人控制单元发出控制指令,从而使GPS自动导航探测机器人运动到指定目标,如图4所示。
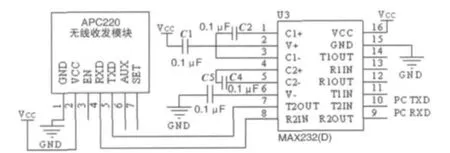
图4 上位机无线收发单元电路图
3 自动导航软件设计
上位机程序在LabVIEW环境下开发,下位单片机程序采用C51开发。下位机数据处理软件用于接收GPS、电子罗盘、温度等数据并发送给上位机,下位机控制软件负责接收上位机控制指令并控制机器人的运行。上位机程序用来接收下位机数据进行坐标转换,并规划机器人的运行路径。
3.1 自动导航算法
通过无线数据采集模块,上位机获取机器人所在位置的经纬度、方位角等数据;由于目标点经纬度已知,所以可以通过高斯-克吕格投影变换法得到目标点与出发点的直角坐标;由电子罗盘检测机器人的指向角来规划机器人路径。由于机器人受重心以及各种外界因素的影响,行驶过程可能出现偏差。因此,采用反馈校正的方式,即发送给机器人指令前一瞬间当作机器人的起始位置,再次与目标点进行路径规划。自动校正指令发送的周期可以根据实际情况加以设置。当机器人与目标点非常接近时(3 m~6 m),上位机发送最后一次指令给机器人(即上位机不再发送指令给机器人),避免由GPS模块精度不高而带来的机器人在目标点打转的问题。
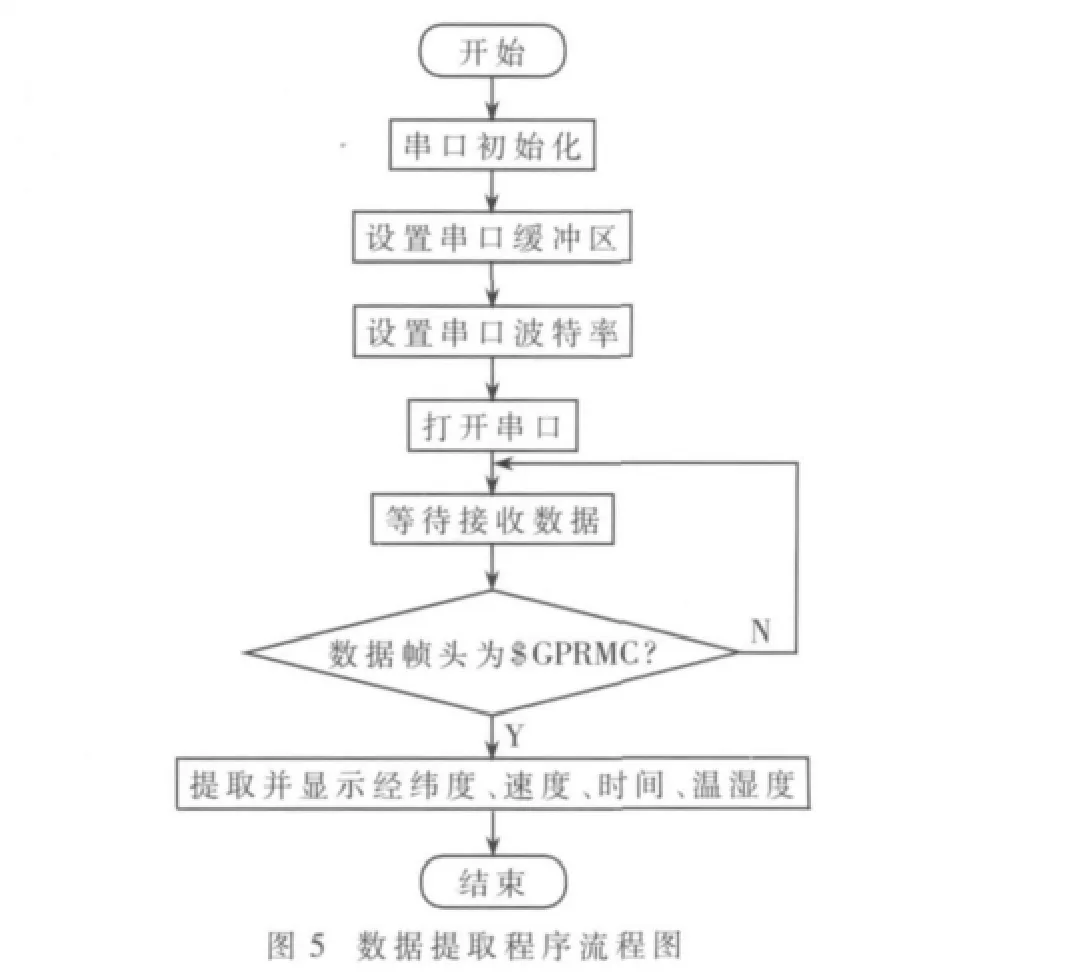
3.2 GPS数据提取程序设计
数据提取程序流程如图5所示,当数据帧头为$GPRMC时,提取并显示目标点经纬度、速度、时间和温湿度。
3.3 上位机程序
上位机对机器人控制有自动和手动两种模式。自动导航适用于远距离导航,在上位机输入指定一个目标点的经纬度,通过转换,最后发给机器人的是一个角度和距离,机器人接收到数据后向目标点前进。在行驶过程中可以对行驶路线进行若干次自动校正,以提高导航能力。手动控制通过上位机发送响应指令控制机器人的前后左右动作,适合短距离位置调整和探测。上位机程序流程图如图6所示。
4 机器人系统测试
对硬件电路制作的GPS自动导航探测机器人进行了试验,并对试验数据进行了分析。
自动导航试验地点选于某地一广场,首先运行LabVIEW开发的上位机监控软件,先采集目标位置,并显示到上位机监控软件中;然后把GPS自动导航探测机器人拿到出发位置;最后在上位机监控软件界面上点击自动导航按钮,机器人自动向目标点进发。其中,试验的出发点经纬度为(E11607.45785、N2419.88293),目标点经纬度为(E11607.45931、N2419.88526),实际距离为 25 m。通过10次机器人自动导航试验,测得机器人最后停止位置与目标点的距离如表1所示。测试结果的绝对误差平均值为1.085 m,相对误差平均值为4.34%。
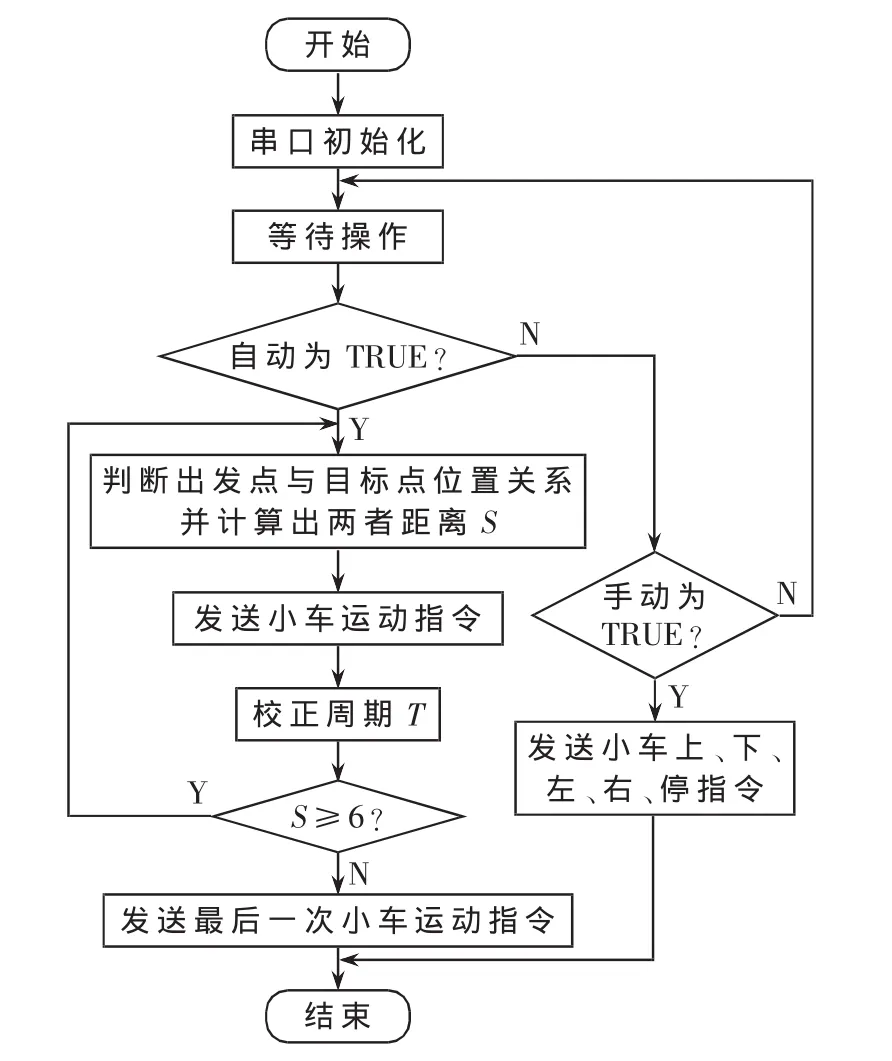
图6 上行机指令流程图

表1 实测机器人停止位置与目标点距离
本文介绍的GPS自动导航履带式探测机器人对地面的适应能力强,可以在对人体有害的环境中代替人运动到指定位置,完成数据采集任务,完成一些危险的工作。在前往目标点的途中机器人能实时测量并发送当前位置的经纬度、温湿度、有害气体浓度、机器人的方位角、速度等,数字摄像机能实时反映机器人周围的环境,并在上位机主界面上,直观地显示出所采集的各种信息;导航的平均误差为1.086 m,最大数据采集间间隔为3 s,无线数据传输模块APC220的无线传输距离为1 000 m,能够通过计算机实现机器人的远距离监控。
[1]LIU J G,WANG Y C,MA S G,et al.Analysis of stairs climbing ability for a tracked reconfigurable modular robot[C].Proceedings of the 2005 IEEE International Workshop on Safety,Security and Rescue Robotics Kobe.Japan:IEEE,2005:36-41.
[2]姜红娟,孟庆鑫.城市主排水管道穿缆检测机器人结构及其运动特性的研究[D].哈尔滨:哈尔滨工程大学机电工程学院,2006.
[3]LI Y W,GE S R,FANG H F,et al.Effects of the fiber releasing on step-climbing performance of the articulated tracks robots[C].Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics.Guilin,China:IEEE,2009:818-823.
[4]贾银山,贾传荧,魏海平,等.基于 GPS和电子海图的船舶导航系统设计与实现[J].计算机工程,2003,29(1):194-195,255.
[5]刘晶,刘钰,陆雨花.基于FPGA+ARM的视觉导航轮式机器人[J].计算机工程,2010,36(21):194-195,198.
[6]田学军.非差分GPS在移动机器人位点导航中的应用[J].制造业自动化,2009,31(6):78-81.
[7]于日平,王德兴.基于GPS与电子罗盘的定向天线自动定向装置[J].微计算机信息,2009(25):121-122.