基于二次曲面反镜的周向全景成像系统
2012-01-31潘晋孝
张 璐,潘晋孝
(中北大学a.仪器科学与动态测试教育部重点实验室;b.信息与通信工程学院,山西 太原030051)
周向全景图是计算机图形学的新型研究课题之一[1],以现场实景图像为数据源,提供场景水平方向360°全方位浏览。全景图一般可分为柱面全景、球面全景和立方体全景图三种。柱面全景图[2]可提供水平方向360°浏览,而球面全景和立方体全景,不仅可以呈现周向360°浏览,还能够提供垂直方向180°视角的浏览,使人们产生三维立体感[3],使人眼所见的场景具有较高的逼真度。
1 二次曲面反镜的折反射全景成像技术
1.1 曲面镜成像技术
一个很普通的球面系统很容易就可以得到周向360°视场的景相[4],再由CCD相机从曲面镜上方将镜面上的信息拍摄,就完成了信息采集。但是由于球面镜上各点到相机焦距距离有差异,曲面镜的顶部成像面积比较小,会造成图像有些部分存在一定的扭曲变形,因此折反射全景系统反射镜面所成的像存在畸变,所以折反射全景成像系统设计的关键之一就是要设计成像系统的参数,也就是本课题中球面镜的各项参数和指标,如球面镜的弧高和成像半径等。
1.2 信息获取技术
CCD是一种半导体器件,能够把光学影像转化为数字信号,是完成信息处理的重要器件。CCD上植入的微小光敏物质称作像素(Pixel)。为了获取曲面镜上的图像信息,本课题采用CCD相机拍摄球面镜面图像来完成。系统将CCD相机置于曲面镜正上方,由于CCD相机镜头有其固定的焦距,为了得到大小合适、清晰的图形信息,相机镜头距离曲面镜的顶点也要设定合适的距离。
2 曲面反镜的全景成像系统设计
2.1 系统组成
系统设计如图1所示。
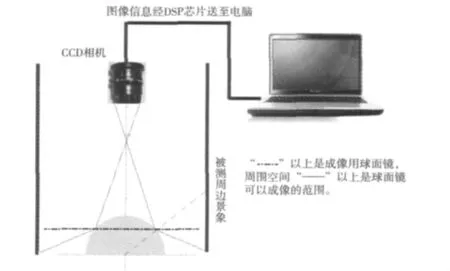
图1 系统设计图
2.2 系统关键部件参数设计
针对每个系统,必须合理设计各个部件的各项参数指标,其简易成像原理[5]如图2所示。

图2 简易成像原理图
针对本系统,假设CCD相机镜头口径已知为m,且其镜头焦距为f,则为了计算方便,可以设m/f=a,因为设计系统时针对实际应用,可以将镜头焦点到球面镜距离设为已知量H,球面镜所在球半径为R,为了计算球面镜参数,将球面镜所在弧半径设为未知量r,球面镜厚度(即弧高)为未知量h。根据这些参量,不仅可以计算出球面镜的详细外形尺寸,而且还可以计算出它的成像视角大小。
根据三角形相似性,可以得到

根据三角形勾股定理,可以得到

将两式联立解方程组,利用二元一次方程根的表达式

最终解出方程

将式(4)代入方程

即可得到r的值。
求出r和h的值后就可以根据r和h的数据算出全景成像系统的成像视角。如图2所标角度,使用三角形相似的原理,分析图中各个角,即
其次,空空如也的木桶是多么沉重!因为他装载的不只是煤炭,更是鲜活的肉身,这活着的该死的肉身实在太沉重,他既有尊严感却又偏偏需要物资的侍候,想象一下骑桶者每次提着空桶前去借煤时的惶恐不安且借而不得的绝望与屈辱,他该有多么痛恨这肉身的沉重!为什么肉身就不能轻盈起来呢?——必须骑着木桶前去,如此就好像把沉重的生活骑在了胯下;必须骑着木桶前去,如此肉身就轻盈起来;轻盈的肉身,把沉重的生活骑在胯下的肉身,是活着的根本目的。——木桶必须飞起来。显然,这是木桶飞起来的生存论依据,他超越于地球引力之上,是合乎情理的心理现实。

结合平面角度关系和三角形相似原理,得到系统的可成像视角θ为

根据式(8),同时也可以得出结论:如果知道被测景物(成像的需求)的成像范围、球面镜的参数或CCD相机的参数这三者中的任意两个,就可以求出第三个详细参数。因此可以反过来结合实际应用来选择合适的CCD相机或设计合适的球面反射镜。
3 圆柱坐标[6]与直角坐标系的转换模型
极对数栅格法也叫傅里叶—笛卡尔变换法,是基于傅里叶——笛卡尔算法的坐标变换方法。其处理问题的算法简便,易于理解。这种方法经常应用处理圆形图片,将其按极坐标划分,之后转化为直角坐标。
二次快速解算法是应用比较广泛的一种方法,其处理图像的方式已经细化到具体的像素,是一种图片处理中比较通用的方法,其实质就是图片的拆分与重组。
3.1 极对数栅格法(傅里叶—笛卡尔变换法)
极对数栅格技术其实是本着由中心向四周、成像面积由小向大的原则沿着由反射镜顶端的顶点到反射镜边缘的弧线将直角坐标下的图像采样成极坐标下的图像。
如下图3为极对数栅格法校正原理图,左边圆形为原图,右边矩形为校正后图像,原图进行栅格采样后将对数极坐标变换原图像上的点一一映射到对数极坐标中去,这种方法也被称为傅里叶-笛卡尔变换法。

图3 极对数栅格法原理图
3.2 二次逆向快速解算法
选用逆向快速解算法时,首先要将原图像中的信息分为若干像素。例如,若图首先将拍摄下来的全景图分成若干个半径相差相同的同心圆,之后将圆周等分为几等分,这就完成了图像初步的分割,之后再结合算法将分割得到的像素坐标(每一份区域)转换到对应的直角坐标中,就完成全景图形的转换工作。
如图4中实例,将原图分为6个同心圆,再将其一周等分为16等分,这样就将原全景图分成了6×16个像素区,之后将这16个区域的坐标对应变换到一张展开的矩形图中去,就完成了极坐标到直角坐标的变换。值得注意的是,在实际应用中,一般是分为上百个同心圆,而且角度也等分为几百甚至上千份,只有划分得这么精细才可能尽量真实、低损耗地再现真实图像。

图4 二次逆向快速解算法原理图
4 试验及数据分析
图5是由MATLAB处理的的灰度全景图。
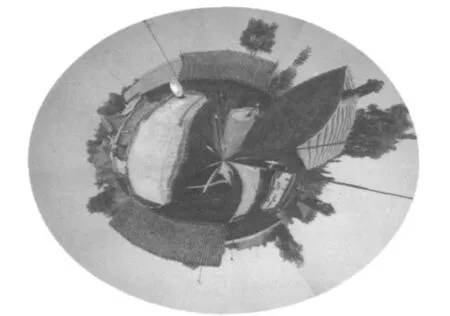
图5 灰度全景图
4.1 极对数栅格法实验结果
观察处理后的展开全景图(见图6),图片水平方向像素损失不严重,但是畸变比较严重。

图6 极对数栅格法结果图
4.2 二次逆向快速解算法实验过程及结果
观察图7会发现,对图像水平和竖直方向各进行一次的二次算法,可以修正原始图像水平和竖直方向上的失真,采用逆向算法,又能减少解算点数,提高解算速度。

图7 二次逆向快速解算法结果图
4.3 方法对比
极对数栅格法是基于线的采样,对场景的竖直方向均按照等比例均匀变化的原则还原,方法简便快捷,但是忽略了球形镜面曲率的影响,所以视场范围越大,失真越严重。而二次逆向快速解算方法[7]从根本上修正了由球面反镜造成的图像非线性扭曲,使还原图像的效果进一步得到改善,同时很大程度减少了解算次数,节省了时间。
5 结论
折反射式全景成像系统[8],相比于鱼眼镜头繁杂的校正算法,以及图像拼接冗余的结构系统,这种方便、高效、低成本的系统的优势明显地体现出来。折反射式全景系统确实是一种性价比很高,前途应用很广的系统。
[1]肖潇,杨国光.全景成像技术的现状和进展[J].光学仪器,2007,29(4):82-89.
[2]曾吉勇,苏显渝.折反射全景成像系统[J].激光杂志,2004,25(6):62-63.
[3]冯茂岩,沈春林.立体显示技术及其研究现状[J].电视技术,2008,32(11):42-43.
[4]曾吉勇,苏显渝.双曲面折反射全景成像系统[J].光学学报,2003,23(9):1138-1139.
[5]曾吉勇,苏显渝.水平场景无畸变的折反射全景成像系统[J].光学学报,2003,3(10):179-184.
[6]陈旺,徐玮熊,志辉,等.折反射全向图像柱面展开校正算法研究[J].中国图象图形学报,2009,14(12):2559-2564.
[7]席志红,吴自新,张曙觉.基于全视觉图像中心的二次逆向快速解算方法[J].哈尔滨工程大学学报,2007,28(4):465-468.
[8]冯永明.全方位图像展开算法改进的研究与实现[D].杭州:浙江工业大学,2007.
