基于CX20106A的超声波测距设计
2012-01-29方正超姚善学
方正超,姚善学
(贵州大学 理学院,贵州 贵阳 550025)
在日常生活中超声波技术都有着广泛的应用,例如催化技术、探伤技术、清洗技术、测距技术等等[2-5]。超声波测距,多应用于汽车倒车雷达、建筑工地以及一些工业现场的位置监控如液位、井深的测量等,一些不方便有形测量工具进行测量的场合多可以考虑使用超声波测量技术来测量[1-2]。利用超声波检测迅速、计算简单、易于做到实时控制,并且测量精度能够达到工业实用要求。为了试验超声波测距控制精度,使得它更加适合于现场实际生活中的检测领域。同时简化工业现场的测量又能达到预期的测量精度,能够符合我们现场测距的要求,给工程实践带来更多的简便易行的方案[3]。
1 超声波测距原理
超声波测距由超声波发射极T40-16发射声波,经过障碍物反射,回到接收端R40-16接收到声波,然后通过单片机计算两次接到声波的时间差来计算障碍物与探头的距离。超声波测距示意图如图1所示。
如上图1所示,被测距离为H,两探头中心距离的一半用M表示,超声波单程所走过的距离用L表示,由图中关系

图1 超声波测距示意图Fig.1 Schematic diagram of ultrasonic ranging
可得:

将式(2)代入式(1)可得:

在整个传播过程中,超声波所走过的距离为:

式中:v为超声波的传播速度;t为传播时间,即为超声波从发射到接收的时间。
将式(4)代入式(3)可得:

当被测距离 H 远远大于 M 时,cos[arctan(M/H)]≈1,于是式(5)变为:

由此可见,要想测得距离H,只要测得超声波的传播时间t和在这个时候对应的外界温度(℃)然后代入表1对应的速度中即可。温度和速度对应表如表1所示。

表1 温度与速度对应表Tab.1 Temperature and the speed of table
2 总体设计
该方案主要通过T/R40-16的集成分立收发超声波模块单元来发射和接收超声波,然后通过计算发射和接收到的时间差来计算障碍物和测距探头的距离。同时通过DS18B20来测试环境温度来进行温度补偿,来实现本设计中的更高精度保证设计方案的可行性[5-6]。系统设计框图如下:

图2 超声测距系统设计框图Fig.2 Design of ultrasonic measurement system block diagram
3 系统硬件设计
3.1 控制单元At89c52
控制模块主要由At89c52单片机、控制电路、复位电路实现,其中还包括振荡电路使用12 MHz高精度晶振荡电容选择30 pF小瓷片电容;复位电路使用电路;使用普通的电解电容与金属膜电阻。该单片机有一下有点:兼容MCS-51指令系统、8k可反复擦写(1000次以上)Flash ROM、32个双向I/O口、256×8bit内部 RAM、3个 16位可编程定时/计数器中断、时钟频率可达24 MHz、2个串行中断,可编程UART串行通道、2个外部中断,共8个中断源。
3.2 超声波产生电路
超声波在空气中传播功率及精度与频率成正比,比较和分析几个常用超声波频率的特点,最终选取频率为40 kHz[4]。为了便于超声波的发射与接收,超声波发射探头采用共振频率为40 kHz的TCT40-16探头,接收探头采用RCT40-16。超声波发射电路主要由超声波换能器和反相器74LS04构成,单片机P1.0端口输出40 kHz间断方波,此时定时器开始计时,信号经两反相器送到超声波换能器的两个电极,可以提高超声波的发射强度。输出端采用两个反相器并联,可以提高驱动能力。电阻R1、R2可以增加超声波换能器的阻尼效果,这样可以缩短振荡时间,提高74LS04输出高电平的驱动能力。超声波发射电路原理图如图3所示。
3.3 超声波接收电路
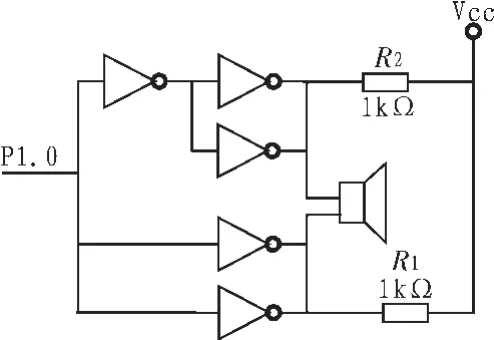
图3 超声波发射电路原理Fig.3 Ultrasonic transmitting circuit principle
超声波接收电路采用SONY公司的CX20106A集成电路,对接收探头收到的信号进行放大、滤波。它是一款红外线检波接收的专用芯片,有较强的抗干扰性和灵敏度。管脚1是超声波信号输入端,其输入阻抗约为40 kΩ;管脚2的C2、R3决定接收换能器的总增益,增大电阻R或者减小C,将使放大倍数下降,负反馈量增大,电容C的改变会影响到频率特性,实际使用中一般不改动,推荐选择参数 R=4.7,C=3.3 μF;管脚3与GND之间连接检波电容,考虑到检波输出的脉冲宽度变动大,推荐参数3.3 μF;管脚5上的连续电阻R4用以设计带通滤波器的中心频率,阻值越大,中心频率越低,取R=200 kΩ时,中心频率约为42 kHz;管脚6与GND之间接入一个积分电容,标准值为330 pF如果该电容取得太大,会使探测距离变短;管脚7是遥控命令输出端,它是集电极开路的输出方式,因此该引脚必须接上一个上拉电阻到电源端,该电阻推荐阻值为R5=220 kΩ,没有接收信号时该端输出为高电平,有信号时则会下降;管脚8接电源正极4.5~5 V。超声波接收电路原理图如图4所示。
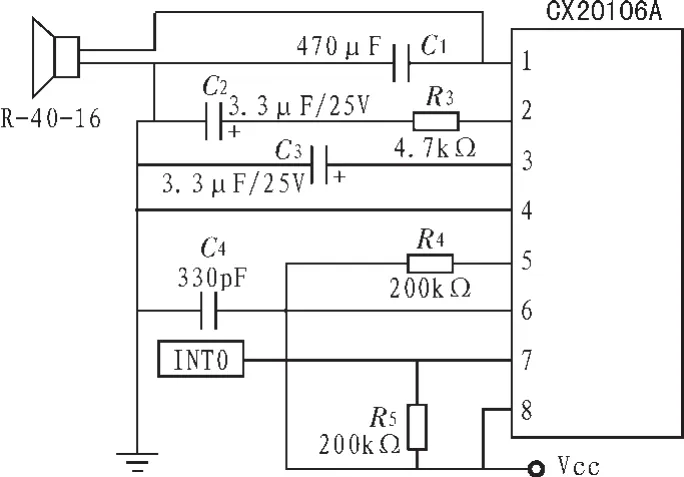
图4 超声波接收电路原理图Fig.4 Ultrasonic receiving circuit principle diagram
3.4 DS18B20的温度补偿模块
温度测量电路主要作用是测量电子器件周围实时环境温度,超声波测距依据是基于超声波在空气中的传播速度,但温度会影响波速,为了使系统更加稳定使测得的数据更加精确能够更好的符合我们实际使用中的要求更好的达到工程实际中的精度要求,这里可以通过增加温度补偿电路,来解决实测精度不高的现象。采用DS18B20数字温度芯片采集当前空气温度,单片机通过单总线接口读到该数据,测温分辨率可以达到0.0125℃,该方法可有效地提高测距精度,且能简便的达到设计目的。温度补偿模块电路图如下图5所示。
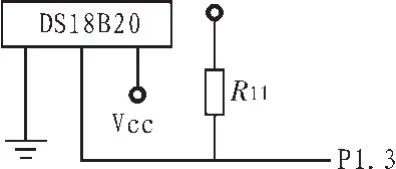
图5 温度补偿模块电路图Fig.5 Temperature compensation circuit module
4 系统软件设计
4.1 系统软件设计流程图
该测距系统的软件设计流程图如下图6所示,主要由外部中断INT0来向单片机申请,当R40-16接收到单片机的反射信号时通过INT0来申请中断然后有定时器T0来计算这段两次反射回来波形的时间差,在通过以设定好的软件来计算障碍物与发射探头的距离。然后由此得出这段需要测量的距离,最后显示在LCD显示屏幕上。
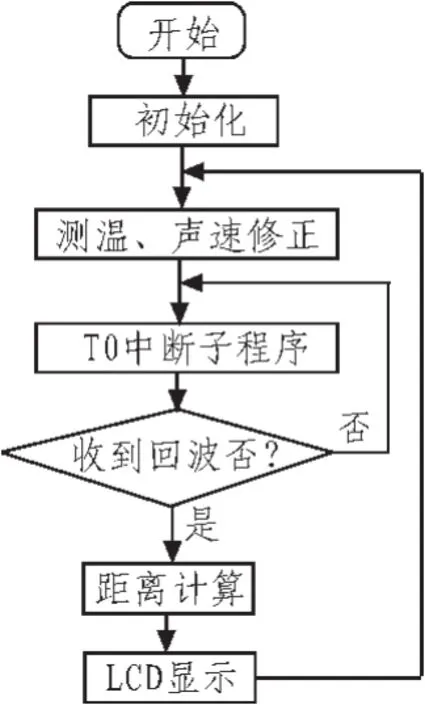
图6 测距系统软件设计流程图Fig.6 Ranging system software design flow chart
4.2 收发显示模块软件设计
在软件设计中首先对系统进行初始化,设定TOMD为T0工作于方式1即16位定时计数工作模式下,置总中断允许为EA,将显示模块进行清0处理,调用超声波发射子程序发射超声波,延迟一段时间(设计中延迟为150 ms,可以自行设定一个合适的延迟)。打开外部中断INT0来接收返回的超声波信号,当单片机检测到有外部中断时就用发射和接收回来的这段时间差来计算障碍物与探头的距离,最后通过LCD的display函数显示在LCD屏幕上。主程序部分设计如下:


5 结束语
本设计通过硬件实现,进行实验测距都能达到较高精度。该设计有结构简单,易于操作,成本低廉,精确度较高等优点适合于工程实践当中对于测距不是要求特别高的领域,而且可以省去好多操作上的麻烦进行实时数据显示。实际制作之中由于加入了DS18B20进行温度补偿使得测距精度有较大的提高。在设计时采用CX20106A芯片用于检波放大,减少了电路之间的互相干扰,减小了电噪声使得系统功能更加的温度。该系统可广泛的应用于倒车雷达、机器人检测、工程测距以及诸多测量领域。
[1]宋杨,王宗伟,戴景民.前置反射式发射率在线测量装置的研制[J].哈尔滨理工大学学报,2009,14(3):126-130.SONG Yong,WANG Zong-wei,DAI Jing-min. The development of emissivity on-line measurement device based on front reflection[J].Journal of Harbin Univefsity of Science and Technology,2009,14(3):126-130.
[2]王峰,葛立峰.一种高精度超声测距系统的设计[J].计算机技术与发展,2008,18(1):229-231.WANG Feng,GE Li-feng.Design of an ultrasonic range measurement system with high precision [J].Competer Technology and Development,2008,18(1):229-231.
[3]Tikanmkia,Mkeltpietikinenaeta1.Multi-robot system for exploration in an outdoor environment[J].Ro-botics and Applications and Telematies,2007,9(1):563-567.
[4]刘升平,王剑,葛红.超声波测距系统的开发与研究[J].计算机工程与应用,2009,45(25):78-81.LIU Shengping,WANG Jian,GE Hong.Ultrasonic ranging system development and resear-Sh[J].Computer Engineering&Applications,2009,45(25):78-81.
[5]彭翠云,赵广耀,戎海龙.汽车倒车系统中超声波测距模块的设计[J].压电与声光,2008,30(2).251-254.PENG Cui-yun,ZHAO Guang-yao,RONG Hai-long.The design of ultrasonic distance measur-ing system used on carbacking system[J].Piezoelectrics&Acoustooptics,2008,30(2):251-254.
[6]高飞燕.基于单片机的超声波测距系统的设计[J].信息技术,2005,29(7):128-129.GAO Feiyan.Design of ultrasonic distance measurement system based on microprocessor[J].Information Technology,2005,29(7):128-129.
