基于元胞自动机的集装箱码头前沿水平运输模型研究
2012-01-23,
,
(武汉理工大学 物流工程学院,武汉 430063)
集装箱码头交通流系统是一个复杂的离散事件动态系统,过去的文献资料对集装箱码头交通系统建立的模型多为基于流程的离散事件动态系统仿真模型,侧重对系统中事件的发生和运行进行控制和分析,集装箱卡车(集卡)行驶一般被视作装船、集箱等事件的组成部分,缺乏对其行驶方式的研究和模拟。元胞自动机(Cellular Automata,CA)是定义在一个由具有离散、有限状态的元胞组成的元胞空间上,按照一定的局部规则,在离散的时间维度上演化的动力学模型,它是研究自组织化复杂系统的有效工具[1]。将一个集卡行驶车位视作单一元胞个体,该元胞周围的车况可视为其相临元胞的各自状态。周围元胞的状态对选择道路决策发生的影响充分体现了元胞自动机理论和车辆行驶特征的一致性。尝试用复杂系统的元胞自动机建模方法对集装箱码头前沿交通流系统进行更细致、深入的仿真建模和分析。
1 码头前沿交通流系统特性
1) 交通流仅由集卡构成,车辆类型单一。
2) 道路类型类似,且交叉路口没有红绿灯控制,基本上靠集卡司机自行判断。
3) 集卡的运输时间直接影响船舶在港时间和装卸效率,进而影响到码头的服务质量,所以码头内的交通要尽可能的减少堵塞和排队现象。
4) 交通流量比较有规律,大体上可以通过码头的吞吐量来判断和估计。
5) 集卡的行驶速度为20~35 km/h[2]。
除此之外,集装箱码头前沿经常设计成单方向行驶车道,因此集装箱码头前沿的集卡流向更加容易预测。
在编制码头元胞模型时,简化处理码头交通构成、集卡行驶速度等因素,而对车辆堵塞和排队进行详细的仿真分析。
2 码头前沿交通系统胞模型构建
2.1 元胞模型状态设定
考虑集装箱码头前沿道路的布局和集卡的行驶规律,将每个集卡行驶车位(即一个 “元胞”)的状态抽象为4种。
状态1(空闲等待)。目前为无车状态,在周围元胞状态影响下,下一次的状态可能进来车转入有车状态,也可能维持无车状态。
状态2(有车且该车无需换道)。目前车位上有一辆集卡,且其正前方不存在排队或堵塞,无需换道。下一次该元胞的状态可能因车辆向前移动转为无车状态,也可能因移入新车或者车辆前方各方向均拥堵形成排队而维持有车状态。
状态3(有车且需向右转)。目前车位上有一辆集卡,且正前方存在排队拥堵,在右前方无车的情况下,下一步该车辆会转向其右方相邻车位(即其右上角的元胞转为状态2)。模型中车辆转弯参考公路车辆转弯规则,优先考虑车辆右转。
状态4(有车且需向左转)。目前车位上有一辆集卡,且其正前方和右前方相邻车位均存在拥堵现象,但其左前方车位无车的情况下,下一步该车辆会转向其左边的相邻车道。状态3和状态4元胞的下一次状态变化情况与状态2元胞类似。
2.2 元胞状态变化规则
每个元胞下一次状态变化情况都受到周围相邻元胞的影响,本模型主要考虑单一元胞A0周围相邻的8个元胞A1、A2、A3、A4、A5、A6、A7、A8的状态情况,其位置分布见图1,设定其状态分别为t1、t2、t3、t4、t5、t6、t7、t8。
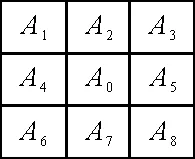
图1 相邻元胞位置分布
在道路上存在一些位置特殊的元胞,这些元胞相邻的元胞有部分不存在,见图2。

图2 前沿道路特殊位置元胞分布
假定该图表示一条4车道的前沿道路,标有字母的空格所在位置的元胞都有其特殊性。
1) 标有字母A的元胞前方不存在元胞,故前方不会存在车辆的占道和拥堵,故A1、A4、A6三个位置的元胞状态永远设定为状态1(空闲等待)。
2) 标有字母B的元胞右方不存在元胞,故这些元胞无法向右转向。其右方元胞视作永远有车,即A1、A2、A3三个位置的元胞状态永远设定为状态2(有车且无需换道)。
3) 标有字母C的元胞后方不存在元胞,故其后方永远无车,A3、A5、A8三个位置的元胞状态永远设定为状态1。
4) 标有字母D的元胞左方不存在元胞,故其左方元胞看作永远有车状态,即A6、A7、A8位置的元胞状态设定为状态2。
5) 标有AB、AD、BC、CD的四个点的情况分别为以上某两种情况的综合。AB处元胞A1、A2、A3三个位置状态为2,A4、A6状态为1。其它3个点周围元胞状态依次类推。
在已知元胞及其相邻位置元胞的状态值后,根据函数计算该元胞下一轮的状态值,计算流程见图3。每次循环计算出所有元胞的新状态值后,即开始下一次循环,将每个元胞重新赋值。实现车辆的前进,转向、排队等行驶情况的仿真。
2.3 车辆换道规则设定
根据车辆跟驰理论,车队中的每辆车必须与前车保持一定的间距以免发生碰撞,后车维持原车道或者换道的动机通常在于前方是否拥堵。造成自身若按照期望速度行驶会产生碰撞的危险,要实现换道必须满足两个前提条件:①换道动机,即本车是不是想换道;②安全条件,即如果本车要换道,对自身以及其它车辆是不是安全的[3]。

图3 元胞状态赋值流程
假定本车所在车道为M,车道相邻左车道为L,车道相邻右车道为R,基于以上理论设定车辆换道规则如下。
1) M→M(不换道)状态要求。 ①t0=2或t0=3或t0=4。元胞处于该状态时,表示该元胞所代表的车位上存在车辆,且该车辆下一步行驶目标确定。下一次赋予状态时,若无车辆进入则其状态必定为状态1,若有车辆进入,则不论该车辆是从正后方车道而来,还是从后侧方车道转向而来,都赋予其状态2;②t0=1且不满足换道条件。当①和②之一被满足时,车辆无需换道。
2) M→R(向右换道)状态要求。①t0=1,t6=1,t7=2,t8=2;②t0=1,t6=2,t7=2,t8=2。元胞处于这两种状态时,A3位置元胞前方存在拥堵需要转向,而A0位置元胞状态为1,可以转入车辆。因为优先考虑向右换道,故此时满足向右换道条件。
3) M→L(向左换道)状态要求。不满足向右换道条件且满足①t0=1,t1=1,t2=2,t3=2;或者②t0=1,t1=2,t2=2,t3=2。处于这两种状态的元胞可向左换道,原理类似向右换道规则。
3 仿真结果分析
3.1 两种模型在车辆密集情况下对车辆自组织现象模拟情况对比
基于流程的离散事件动态系统仿真模型对集卡行驶规律的模拟相对简单,基本规则为:车辆按指定车道向前行驶,前方车道存在车辆堵塞道路则进行排队。排队车辆数目超过道路车辆容纳能力后,新来车辆向相邻车道换道行驶,原路堵塞消失时排队车辆继续向前行驶,否则持续排队。该规则忽略了驾驶员的主动性,造成一些不必要的排队等待时间,而基于元胞自动机理论的模型能对该问题进行较好的修正。
用某随机数流来模拟进入码头前沿道路的集卡数量,对元胞模型和传统模型进行对比仿真试验。运行相同时间后,两种模型中各个车道上车辆的分布数量情况见表1。

表1 码头前沿道路集卡分布 辆
可以看出,元胞模型在车辆较拥堵的状况下对集卡自组织特性进行了较好的模拟,集卡在道路上分布较传统模型均匀。图4a)、b)分别为元胞自动机模型和传统模型中,码头前沿道路各车道上的集卡分布数量。
3.2 两种模型在作业条件相同的情况下前沿车辆吞吐量统计对比
由于元胞自动机模型在仿真实验中较传统模型减少了不必要的排队和堵车现象,故在相同的外界条件下,同样的时间内,元胞自动机模型中的码头前沿吞吐量统计值应该更接近实际值。本文建立的模型为天津港某集装箱码头的道路交通仿真分析模型,该码头岸线总长度1 400 m,纵深约1 000 m,岸边配置15台岸桥,轨距35 m。两种不同模型以及实际情况在相同的时间段通过相同码头前沿道路的总集卡数量统计见表2。

图4 码头前沿集卡分布
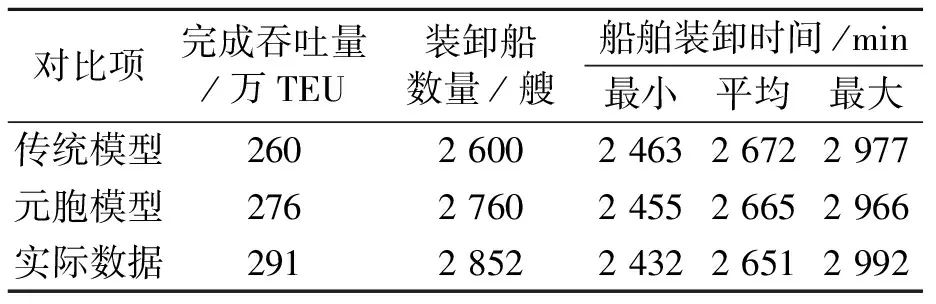
表2 完成吞吐量和完成装卸数量统计
由表2可见,运用元胞自动机模型在集装箱码头前沿吞吐量数据统计方面,能够仿真出更接近现实生产数据的结果。
4 结论
运用元胞自动机理论能够建立对集卡行驶路径和行驶规则模拟更贴合实际的集装箱码头交通系统模型。在计算机仿真技术高速发展的今天,这种新型模型能够满足仿真建模结果更精确的现实要求。
由于依据元胞自动机理论建立的仿真模型对交通流模拟的精确程度较传统模型高,状态的刷新和重新赋值过程较复杂,导致了程序的数据处理速度较传统模型有所减缓,进行仿真模拟实验需要较长的运行时间。因此,对模型结构进行优化,减少冗余的数据运算,使其运行速度合理提升是建立元胞自动机模型需要考虑和注意的问题。
[1] 贾 斌,高自友,李克平,等.基于元胞自动机的交通系统建模与模拟[M].北京:科学出版社,2007.
[2] 肖矫矫.集装箱码头路网交通研究[D].武汉:武汉理工大学,2006.
[3] 李 江.交通工程学[M].北京:人民交通出版社,2002.
