机载相控阵雷达STAP原理及其干扰方法研究
2012-01-15唐孝国张剑云
唐孝国,张剑云
(解放军电子工程学院 安徽 合肥 230037)
现代战争环境复杂,来袭目标常常是大纵深、全方位、多批次、全高度的。及时、准确地发现来袭目标是掌握制空权的关键。机载雷达以其突出的预警和搜索能力受到了许多国家的青睐,在现代战争中扮演着十分重要的角色,也受到了各国的高度重视。新一代机载雷达采用了相控阵体制,相控阵雷达具有波束无惯性捷变、控制灵活等独特优点,能够满足现代雷达系统多目标识别与跟踪、远作用距离、高数据率、强自适应能力、高可靠性能的要求。
机载雷达经常处于下视工作状态,地面杂波对检测性能的影响十分严重。地杂波不仅强度大,而且由于不同方向的地面散射体相对载机的速度不同,使杂波谱大大展宽[1]。有效地抑制地杂波是机载雷达工作的难题,又是必须解决的问题。
解决杂波抑制的传统技术包括时间平均杂波相干机载雷达(Time Average Clutter Coherent Airborne,TACCAR)和偏置天线相位中心 (Displaced Phase Center Antenna,DPCA)技术[2]。TACCAR和DPCA技术均较成熟,设备相对简单,可获得稳定的主杂波对消比,是目前机载雷达中广泛被采用的补充方法。但这两种技术对旁瓣杂波无明显的抑制,且对误差比较敏感,因此在工程上受到很大限制。
随着军事技术的发展和战场环境的复杂化,采用传统技术的机载雷达越来越难以满足现代战争的要求。单纯的相控阵天线技术也很难形成超低副瓣电平,TACCAR技术和DPCA技术抑制地杂波能力有限,所以要想高效地抑制地杂波只有通过天线和信号处理技术共同完成。空时二维自适应处理(Space-Time Adaptive Processing,STAP)技术正是在这种情况下应运而生的,它可以有效提高机载相控阵雷达的地杂波抑制能力[3-5]。由于机载雷达地杂波的空时耦合特性,杂波在空时二维平面内呈刀背式分布,空时二维自适应处理技术通过与相控阵体制的机载雷达有机的结合,形成与杂波匹配的斜凹口,同时又可在一定程度上补偿系统误差的影响,有效地抑制地杂波,并大大改善了系统的检测性能[6]。
电子战越来越成为决定现代战争成败的关键因素。随着科技不断发展,现代电子战更加多元化,逐渐发展成为包含雷达对抗、通信对抗、光电对抗、水声对抗、GPS导航对抗、精确制导武器对抗、军事卫星对抗及新概念电子战武器对抗等多种对抗方式的新形态。雷达电子战是电子战的一个重要分支,主要包括雷达电子支援(ES)、雷达电子进攻(EA)和雷达电子防护(EP)3个方面。雷达电子干扰是雷达电子战的主要内容之一,旨在制造复杂的电磁环境,大幅消弱敌方雷达的作战性能,其重要性已经被若干战争实例证实。
现代雷达各方面性能的提高,对雷达对抗方提出了巨大挑战:首先,实施电子干扰的前提是电子侦察设备能对有效获取敌方雷达的重要信息,否则基本不能有效干扰敌方雷达,所以首先电子侦察设备必须能克服雷达低旁瓣、低截获概率波形、雷达信号参数捷变等抗截获技术的障碍;其次,在电子侦察设备获取了敌方雷达的重要信息后,要有效干扰雷达,则干扰机必须保证有效的干扰信号、足够大的发射功率、足够大的天线增益等,保证干扰信号能进入敌方雷达并能影响其正常工作;在此些前提下,反辐射弹打击等后续对抗措施才能更容易的实施。可见,对现代雷达干扰技术的研究具有非常重要的意义,对现代雷达的电子干扰有效与否直接关系到现代战争的成败。
由于STAP技术能大大加强机载雷达的杂波抑制,提高目标的检测能力,而自古以来,雷达技术与雷达对抗技术总是一个相辅相成、相互竞争和相互促进的关系,一项雷达技术的突破必将给对抗放提出严峻的挑战,笔者探究了对STAP技术的干扰方法及其干扰原理,使得STAP技术的性能下降,减弱其目标检测能力,从而达到减弱其战斗力而保障己方战斗力的目的。
1 STAP技术的基本原理
1.1 杂波几何模型
不失一般性,假设雷达天线采用的矩形平面阵。对天线阵实行可分离加权,每一列微波合成为一路,则形成由个等效阵元组成的等间距线阵[2]。

图1 机载雷达阵列天线和散射体几何图Fig.1 Geometry of airborne radar array and scatters
假设载机水平飞行,竖直放置的平面阵天线与地面散射体的几何关系上图所示。其中ψ为主波束高低角,θ为主波束水平指向,ψ为观察方向,θp为阵列和航向的夹角,V为载机速度,λ为波长,则散射体P的回波的多普勒频率为

对于空时二维处理,对时域权的控制相当于改变其多普勒(fd)响应特性,而控制空域等效线阵的权相当于改变其锥角余弦(cosψ)波束响应[7]。因此,要从空时二维滤波的角度入手研究二维杂波的抑制,取2fd/fr和cosψ作坐标是合适的,其中 fr表示脉冲重复频率,且 cosψ=cosθcosφ。 则式(1)可改写为

其中,fdm=2V/λ表示地杂波散射体的最大多普勒频率。对于不同的偏航角θp可以得到不同的情况,其中θp=0°称为正侧视阵,此时杂波轨迹在2fd/fr-cosψ平面上呈现为一根直线;θp=90°称为前向阵,此时杂波轨迹在2fd/fr-cosψ平面上呈现为一簇同心圆;0°<θp<90°时杂波轨迹在 2fd/fr-cosψ 平面上呈现为一簇椭圆。
1.2 二维杂波数学模型
对于一M×N的阵面,经微波列合成后等效为一N元线阵,该线阵实现空域采样。设时域采样数(即时域脉冲数)为K,则第l个非模糊距离环的雷达空时快拍采样信号可表示为

式中 x(n,k),n=1,…N,k=1,…K 表示第 n 个天线阵元第 k个时刻的空时二维采样数据,也可用(NK×1)维矢量表示,即

式中 Xl(k)=[x(1,k) x(2,k) … x(N,k)]T,k=1,2,…,K 为第k个脉冲采样的阵列数据。空时自适应处理通常是以距离环数据为最小处理单元,下文如没特殊说明所有数据只限于一个相干处理间隔内的单位距离环数据。
1.3 STAP算法原理
前面讨论了空时二维杂波的特性,从中可以看出杂波谱分布的复杂性,反映在二维平面上为强空时耦合性[8-9],这就决定了杂波抑制应从空间和时间二维空间中进行。Brennan首先提出了空时二维处理思想,并用于基于相控阵体制的机载预警雷达,其本质是将一维空域滤波扩展到了时间和空间二维域中,并在高斯杂波加确知信号模型下,根据似然比理论导出了一种空时二维自适应处理结构,即“最优处理器”。空时二维自适应处理原理如图2所示。图中,{wnk}为空时二维权系数,n=1,2,3,…N;k=1,2,3,…K。用 NK×1 维表示处理器权矢量,则

该处理器可以描述为如下优化问题

其中R为NK×NK接收数据的协方差矩阵,为空时导向矢量

式中

由(6)式可得空时二维最优化处理器的权矢量Wopt为
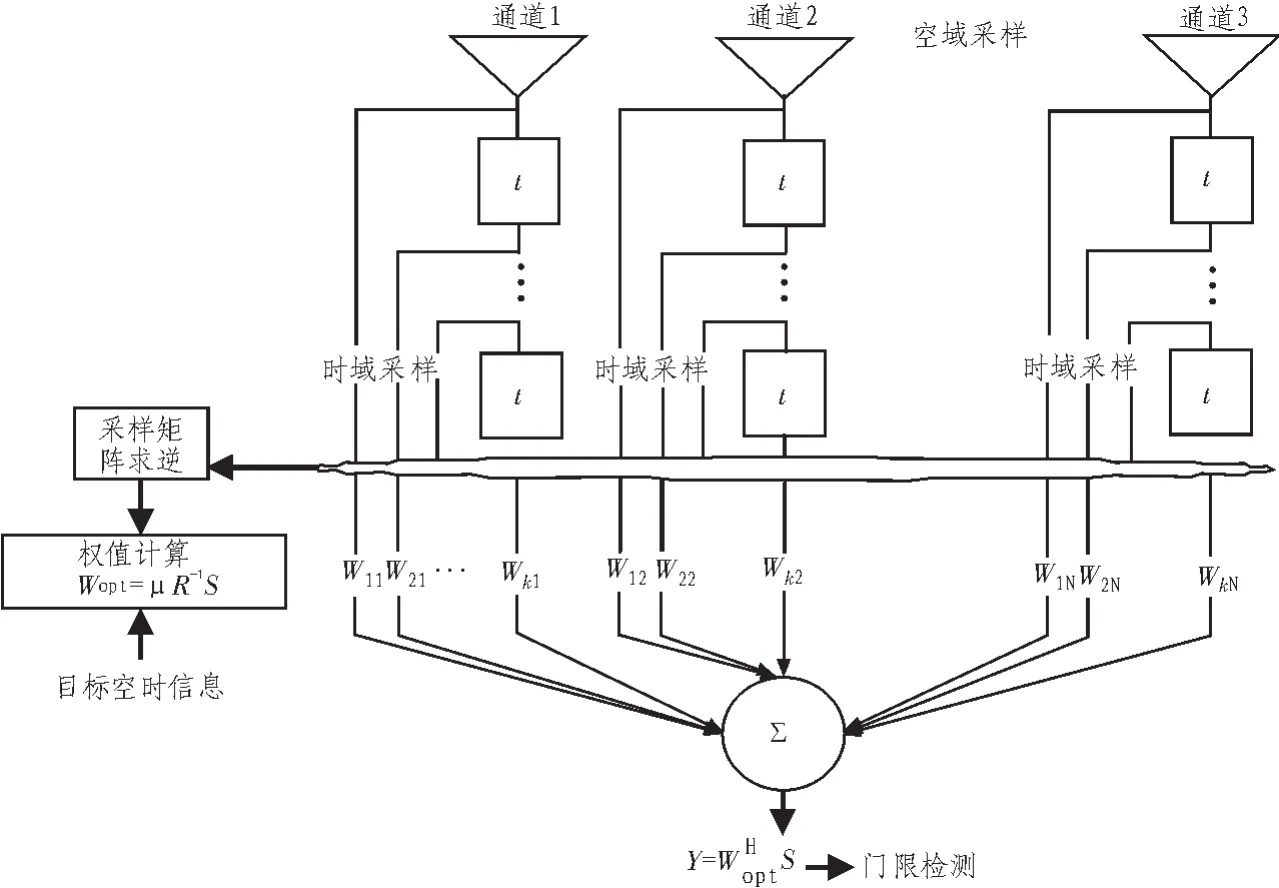
图2 空时二维自适应处理原理图Fig.2 Principle of space-time adaptive processing

其中,μ=1/(SHR-1S)。 则最优二维响应输出为

图3、图4给出了目标位于cosψ=0.2与2fd/fr=0处的杂波频谱图和最优处理器二维频响图。同时说明了式(11)的几何意义,即最优处理器在信号方向(cosψ=0.5与2fd/fr=0)有最强输出,而在杂波分布方向形成二维凹口。

图3 杂波功率谱Fig.3 Power spectral of clutter
2 STAP干扰方法探究
前面阐述了STAP技术的基本原理,它是利用杂波的空时二维耦合性来抑制杂波的。然而任何一项先进的技术有其优点也就必有其弱点或者局限性,下面就从STAP的主要局限性出发提出可能的干扰方法。
2.1 对STAP的密集干扰
STAP抑制杂波的前期是系统要有足够的自由度(Degree of Freedom,DOF),至少要大于杂波的自由度,而有源干扰的引入将使杂波与干扰的自由度大幅度增加,这将使本来就很复杂的处理系统进一步复杂,因此,对于很多次最优的部分自适应降维处理方法而言,当有多个有源干扰时,系统性能将因缺乏足够多的自由度而降低,特别是主瓣干扰,其影响就更为严重。

图4 最优二维频率响应Fig.4 Optimal two-demention frequency response
针对STAP对系统自由度要求较高这一局限性,可考虑采用密集干扰方法,即从不同的方向施放几组干扰,每组均密集分布于一个小的角域内,随着干扰数目的增加,对系统的自由度要求将增高,其性能将逐步下降,而且,对同样的干扰数目,干扰强度越强,性能下降也会越明显。
2.2 对STAP的灵巧噪声干扰
STAP的数据域实现是由式(12)给出的加权滤波,而实际上,杂波协方差矩阵和表示目标信息的空时导向矢量S都是未知的。处理器用估算值来代替,由此获得自适应加权矢量

该方法被称为样本矩阵求逆(SamplingMatrixInversion,SIM),文献[4]还介绍了其他自适应加权计算方法。在高斯杂波加噪声背景下,由最大似然(Maximum Likelihood,ML)估计可得

R^称为采样协方差矩阵,L表示距离门数。利用采样协方差矩阵代替真实协方差矩阵会造成系统输出信杂噪比下降3 dB。要使信杂噪比的下降在,则要同时满足两个条件[10]。一是参与估计协方差矩阵的训练数据必须独立同分布(Independent Identical Distribution,IID), 二是训练数据总数L≥2NK。为了避免目标自行白化,处理器将剔除训练数据中的检测单元和几个相邻单元 (称为保护单元或保护通道),性能损失较大程度是实际协方差矩阵与估计协方差矩阵的偏差造成的[11-12]。因此,如果引入的干扰使训练样本在距离-多普勒域呈非均匀状态而得不到足够的IID样本则会使得矩阵估计误差很大,进而滤波器凹口偏差较大,从而导致STAP对干扰和杂波的抑制性能急剧下降。
针对STAP对非均匀环境下训练样本不足这一局限性,可采用灵巧噪声干扰,因为灵巧噪声干扰兼具欺骗和压制双重特性,且其功率在距离-多普勒域呈非均匀分布,因而将导致没有足够的IID训练样本数去估计杂波协方差矩阵,使其估计误差很大,进而滤波器凹口偏差将很大,从而使其性能急剧下降。
2.3 快变干扰
STAP的最大特点是可以对外部环境自适应的学习,但有个致命的缺陷,即外部环境变化太快会导致学习失败,如果引入在距离向和多普勒向变换(比如功率等)比较剧烈的干扰,将对STAP的性能造成致命的威胁。
针对STAP对快速变化的环境自适应能力差这一局限性,可设计一种在距离向和多普勒向变化比较剧烈的干扰样式(为方便表述,称其为快变干扰),从而对STAP技术造成致命的威胁,无论怎样设计干扰,其初衷必须是变化,从而导致STAP失败。
2.4 地形散射干扰
机载雷达[13-14]在下视工作时,其雷达主波束将同地面相交,如果在这一地区放置几个干扰机,而且它们的发射的能量可以覆盖的地面区域与雷达波束所覆盖的相同时,相当部分的反射能量可进入雷达系统,这种干扰称之为地形散射干扰(Terrain Scattering Jamming, TSJ),也称热杂波。 现代雷达天线一般都能实现低旁瓣或者超低旁瓣,因此它主要作为主瓣干扰,可以严重影响STAP的性能。
因为STAP方法实质上都是基于独立的、高斯噪声条件下的滤波器设计,一旦引入高电平、在空时二维域展宽的非平稳的随机噪声,就会导致其性能和可用性达不到预想的目标。也就是说,以完成对消技术为基础的空时自适应处理方法,不能有效地消除来自非常规辐射体的地形散射干扰,这是由于以目标线性约束为基础的空时自适应处理算法,在解决多普勒频谱展宽的主波束干扰方面基本上是无能为力的[2]。
2.5 相干转发干扰
基于数字射频存储 (Digital Radio Frequency Memory,DRFM)的相干转发干扰(Coherent Repeater Jamming,CRJ),它产生与被干扰的雷达系统相同的载波频率、调制型式、脉冲宽度和脉冲重复频率(PRF)的相干脉冲串,具有干扰脉冲的两次扫描间距延时随机特性和在脉冲串期间具有可调节的、线性初始相位渐进的特性,实际上,CRJ产生有随机距离和多普勒频率的与目标类似的干扰信号,因此CRJ对于以STAP为基础的AEW系统将产生严重威胁。
对于以STAP为基础的常规系统,CRJ会引起虚假目标。然而,CRJ将干扰用来估计协方差矩阵的辅助数据矢量,这种干扰使得通常均匀假设的条件受到严重背离,这一点只有在基于STAP的系统上才会出现。
3 结束语
现代雷达各方面性能的提高,对雷达对抗方提出了巨大挑。STAP技术最大的特点是可以对外部环境进行自适应学习,但任何一项先进的技术有其独特的优点也必有其弱点,对于STAP来说,对系统自由度要求和在分均匀环境下缺乏独立同分布的样本就是其两个主要的局限,还有一个致命的缺陷就是对变化太快的外部环境会导致其自适应学习的失败。因此,本文从STAP的原理出发,分析了其局限性和弱点,在此基础上研究对抗STAP技术的干扰方法并阐述了其作用机理,具有一定的理论价值,当然其具体效果还有待针对具体的方法建立相应的干扰数学模型进行仿真研究。
[1]保铮,张洪玉,廖桂生,等.机载雷达空时二维信号处理[J].现代雷达,1994,2(1):38-48.BAO Zheng,ZHANG Hong-yu,LIAO Gui-sheng,etal.Space-Time signal processing for airborne radars[J].Modern Radar,1994,2(1):38-48.
[2]王永良,彭应宁.空时自适应信号处理[M].北京:清华大学出版社,2000.
[3]Klemm R K.Principles of space-time adaptive processing[M].London:The Institution of Electrical Engineers,2002.
[4]吴仁彪.机载相控阵雷达空时二维自适应滤波的理论与实现[D].西安:西安电子科技大学,1993.
[5]Brennan L E,Reed I S.Theory of adaptive radar[J].IEEE Trans.on AES,1973,9(2):237-252.
[6]Melvin W L.A STAP overview[J].IEEE AES Magazine,2004,19 (1):19-35.
[7]Wang Y L,Peng Y N,Bao Z.Space-time adaptive processing for airborne radar with various array orientations[J].IEE Proc.Radar, Sonar Navigation ,1997,144(6):330-340.
[8]Klemm R.Optimum clutter suppression in airborne phased array radar[C]//Paris, France:Proc.of IEEE ICASSP,1982:1509-1512.
[9]Klemm R.Suboptimum clutter suppressing for airborne phased array radar[C]//London,UK:Proc.of IEE Int.Conf.on Radar 82,1982:473-476.
[10]Reed I S ,Mallett J D,Brennan L E.Rapid convergence rate in adaptive arrays[J].IEEE Trans.on AES,1974,10 (6):853-863.
[11]Klemm R.Applications of space-time adaptive processing[M].IEE Radar,Sonar,Navigation and Avionics,IEE Press,2002.
[12]Melvin W L,Callahan M J,Wicks M C.Bistatic STAP:Application to airborne radar[C]//IEEE 2001 Radar Conference,Long Beach,2002:1-7.
[13]刘德军.机载雷达探地及其特性分析[J].现代电子技术,2009(5):34-35.LIU De-jun.Airborne radar grounding and its characteristics analysis[J].Modern Electronics Technique,2009(5):34-35.
[14]王敬强,骆鲁秦,张晓杰.机载雷达告警系统对敌雷达测向性能分析[J].电子科技,2011(7):39-41.WANG Jing-qiang,LUO Lu-qin,ZHANG Xiao-jie.Performance analysis of the airborne Rrdar warning system[J].Electronic Science and Technology,2011(7):39-41.
