一种智能交通系统的自适应拥塞控制方法
2012-01-15杨伟钧
杨 燕,杨伟钧
(广州城市职业学院 广东 广州 510405)
随着经济的发展,交通需求和交通量成为城市交通网络中急需解决的问题,智能交通系统为改善和提高交通发挥了重要的作用,其中,交通信号控制是智能交通系统的一个重要方面,平面交叉口的控制是智能交通流量控制的基础。交通信号控制系统具有较强的非线性、模糊性和不确定性,用传统的控制理论和方法很难对其进行有效的控制,如传统的定时控制和感应控制具有很明显的缺点。把先进技术应用与交通路口的信号控制是一个新的研究方向。1977年希腊的C.P.Pappis和英国的E.H.Mamdani提出了单交叉口模糊控制法(称Pappis法)[1],分析考虑单交叉路口的理想状态下的控制;1992年我国徐东玲等学者也提出了基于感应控制思想的单路口模糊神经网络控制方案,效果较好。
目前很多路口都是多相位的,因此多相位平面交叉口的研究很有必要。笔者针对车流量拥塞控制问题提了一种模糊模型参考学习控制策略。交通路口车流量的高突发性和时变特征对智能交通系统自适应性能[2]提了更高的要求。笔者提出的控制策略,主控制通道采用模糊控制方法,综合考虑多相位平面交叉口当前到达车辆的排队长度和后继两相位车辆的排队长度,对相位实施不同的配时方案,保证系统的稳定性和鲁棒性;辅助学习通道采用模糊模型参考自适应方法实现主通道控制参数的自修正和自学习过程,针对车流量突发性状况自适应调整主控制通道的配时参数,对相位实施不同的配时方案,提高多相位路口的通行能力,缓解交通压力。
1 车流量拥塞控制模型
根据智能交通系统中多相位路口车流量主动队列管理的作用机制,可以得到拥塞控制的流体动力学模型如下所示[3]:

其中,V (t)为车流量窗口大小;F(t)为车流传播时间RTT;d(t)为车流缓冲区队列长度;M(t)为车流链路容量;Ty 为传输时间;K(t)为交通路口活动相位连接数;y(t)为主动丢弃概率。定义(V,d)为流体模型的状态变量,y为输入变量。令V′=0 和 d′=0 时, 得到网络流体动态系统的平衡点(V0,d0,y0)。进一步在平衡点附近线性化,则可得到在近似时滞二阶动态的传递函数为

2 主通道模糊控制系统设计
本文模糊模型参考学习控制器引入了参考模型的学习机制对模糊控制的知识库进行修正。由于高速网络中分组丢弃机制需要较强的实时性,因此本文提出的控制方法采用了模糊反向推理机制对主控制器的参数进行修正,以满足系统的实时性要求。拥塞控制系统输入为平均队列长度与期望队列长度的偏差以及偏差的变化率,系统输出为所计算的丢弃概率。主通道模糊控制器是一个双输入单输出结构的控制器,输入变量为A,B(队列偏差、偏差变化率),输出变量为C(控制量丢弃概率)。控制规则表示为

其中Ai,Bj,Ck分别表示语言词集。主通道模糊控制器的输入为E和EC,输出为U,设定E,EC和U的论域均为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。 对应的模糊语言子集为{NB(负大)、N(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)}。 通过比例因子 ke和 kec将偏差e和ec转换为模糊学习控制器的输入论域E和EC,通过量化因子ku将控制器的输出转化为实际控制量。E=e×ke和EC=ec×kec,其中〈〉为取整运算。在模糊模型参考学习控制器中,控制规则可以得到在线实时调整,每个输出与输入可以用一定的对应关系来表示:

通过调整α,就可以根据不同交通网络状况、不同时刻的误差和误差变化率来调整控制规则[4]。当平均队列长度与期望队列长度之间的偏差较大时,或者当网络的业务量突发性能较强时,误差对输出的影响应超过误差变化率的影响,α的值应取得较大以获取较好的稳定性。反之,α的值可取得小些以提高系统控制精度。模糊模型参考学习控制就是利用参考模型的输出与实际输出的误差及其变化率实时在线地调整α的值来达到调整控制规则的目的。为了使模糊模型参考学习控制器做到实时在线推理,对模糊模型参考学习控制器的推理过程进行了改进。
3 辅助通道模糊反向推理设计
本文仍然采用模糊推理方法来完成对α的调整,以保证修正过程的简单迅捷。α的调整过程是基于参考模型与实际对象的误差及其变化率的模糊推理来实现的。具体实现如图1所示。

图1 反向推理学习结构Fig.1 Study structure of backward inference
其中,E^,E^C,S 分别为 e^,e^c 和 α 的模糊量, 其论域均为{-6, -5,-4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6}。 E^,E^C 和S对应的模糊词集为{NB,NM,NS,ZO,PS,PM,PB}。根据在校正过程中要遇到的各种可能出现的情况和相应的调整策略得到控制规则表如表1所示。

表1 α调整规则Tab.1 Rules of α adjustment
根据表1,用Max-Min方法进行Fuzzy推理和逆模糊化[5],可得到模糊判决表。在系统运行时的t时刻采样周期内,根据E^,E^C由α调整规则模糊判决表可直接查出相应的S,从而得出α的相应调整值。

其中, kα 为量化因子,使得 α∈(0,1)。
4 控制算法实现步骤
对于整个模糊模型参考学习控制器来说,在t时刻采样周期内,根据队列长度误差和误差变化率E^,E^C,可由模糊判决表查出相应的S,进一步得到相应的α值,再由E,EC,α根据式(4)可得到规则自校正模糊控制器的输出U,并由量化因子ku计算得到丢弃概率p。控制算法实现步骤如下[6]:
1)计算拥塞控制系统的输入状态。
2)根据参考模型的输出与实际对象输出计算e^,e^c。
3)根据参考模型误差和误差变化率 E^,E^C ,由式(5)计算相应的α值。
4)计算规则自校正模糊控制器的输出U。
5)由模糊控制的量化因子计算最终的丢弃概率p。
5 仿真研究
通过仿真试验来评估模糊参考模型网络自适应拥塞控制算法,交通流拓扑结构采用哑铃型结构,链路容量为1 500个/s,随机延时为[16 s,24 s]之间的平均分布,业务源采用了持续性业务流,交通路段的缓存为800个,平均流量长度为500个。仿真研究将本文提出的模糊模型参考控制方法与普通模糊控制进行比较,研究了在突发性状况下2种算法的控制性能和鲁棒性能。
2种控制算法的仿真结果如图2、图3所示,注意到当输入源发生突发性增长时,普通模糊控制策略将使缓冲区队列长度严重脱离期望队列长度,而使用了模糊参考模型自适应控制后,缓冲区队列仅仅经过一个短暂的突发脉冲就恢复到平衡点附近。从实验结果可以看出,由于普通模糊控制器的推理方式和规则知识固定,因此在交通道路车流发生突发变化时难以达到满意的控制性能,而本文提出的车流自适应拥塞控制方法能够跟随车流量状况实时调整模糊控制参数,进而对突发性车流拥塞对象具备了良好的自适应控制性能。
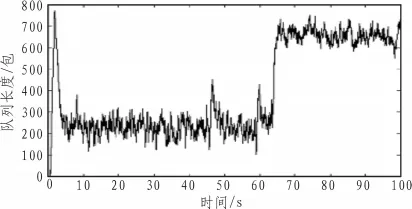
图2 模糊控制的队列长度Fig.2 Length of queue by fuzzy control

图3 模糊模型参考自使用控制的队列长度Fig.3 Length of queue by fuzzy reference model mechanism adaptive control
6 结束语
针对车流状态的突变行为,本文提出了一种基于模糊参考模型机制的自适应拥塞控制算法,以提高在多相位交叉路口的车流量控制的服务质量。该方法采用双通道信息回路对车流量缓冲区队列长度作自适应调整与控制。自适应模糊控制计算过程简单迅捷,该算法在自适应性能和实时性能之间实现了较好的平衡。性能之间实现了较好的平衡。
[1]Pappis C P,Mamdani E H.A fuzzy logic controller for a traffic junction[J].IEEE Transactions on Systems,Man and Cybernetics,1977:707-717.
[2]杨伟钧.一种高性能指纹锁硬件平台的设计[J].电子设计工程,2010,18(4):131-133.YANG Wei-jun.A design of the platform about the highperformance fingerprint locks Hardware[J].Electronic Design Engineering,2010,18(4):131-133.
[3]刘治,章云.基于模糊参考模型机制的网络自适应拥塞控制[J].计算机工程,2008,7(4):89-91.LIU Zhi,ZHANG Yun.Network adaptive congestion control based on fuzzy reference model mechanism [J].Computer Engineering, 2008,7(4):89-91.
[4]牛强,刘学平,向东,等.基于模糊控制的自动进料微控制器设计与实现[J].仪表技术与传感器,2008,45(11):93-95.NIU Qiang,LIU Xue-ping,XIANG Dong,et al.Design and implementation of automatic loading microcontroller with fuzzy control[J].Instrument Technique and Sensor,2008,45(11):93-95.
[5]Paganini F,WANG Zhi-kui.Doyle J C, et al.Congestion Control for High Performance,Stability and Fairness in General Networks[J].IEEE/ACM Trans.on Networking,2005,13(1):43-56.
[6]杨海马,刘瑾,吴文婕.基于模糊控制的恒压供水智能监控系统的研究[J].仪器仪表学报,2006,27(6):1870-1871.YANG Hai-ma,LIU Jin,WU Wen-jie.Study on the intelligent detecting system for water supply of constant pressure based on the fuzzy control[J].Chinese Journal of Scientific Instrument,2006,27(6):1870-1871.
