具有尺度与旋转不变性的立体影像自动匹配研究
2012-01-04赵西安陈志学吕京国靖常峰
赵西安,陈志学,吕京国,靖常峰
北京建筑工程学院测绘系,北京100044
具有尺度与旋转不变性的立体影像自动匹配研究
赵西安,陈志学,吕京国,靖常峰
北京建筑工程学院测绘系,北京100044
提出一种具有尺度与旋转不变性的影像自动匹配算法。首先基于方向小波变换构造三尺度特征点算子,进行两尺度匹配,保证其尺度不变性问题;其次构造特征点64维描述向量,解决影像匹配的旋转不变性。分别采用地面立体像对、无人机平台立体像对、航空立体像对进行试验分析。试验结果表明,提出的立体匹配算法具有良好的尺度和旋转不变性。
影像匹配;立体影像;尺度不变性;旋转不变性;特征点
1 引 言
立体影像匹配是数字摄影测量的核心技术之一。常用立体影像匹配算法,如跨接法匹配、核线匹配、最小二乘匹配[1]在地形信息自动生成中效果明显。但对于建筑物的三维信息自动生成,上述算法效果还不明显。文献[2]提出的基于小波变换、遗传算法和最小二乘匹配的高精度影像匹配组合算法,其小波变换用于减少匹配搜索数据,遗传算法用于优化搜索空间,最小二乘匹配则用于获得子像素匹配精度。文献[3]提出的全局自动配准算法,采用多分辨率小波变换缩小搜索空间,实现多传感器、大数据量影像的快速高效自动配准。当影像间视差不连续,或存在明显辐射强度变化,或有较大旋转变化时,上述算法的匹配效果明显下降。Fourier-Mellin变换是保持旋转、尺度和平移不变性算法,在SAR与多光谱影像配准,医学影像匹配中得到应用[6-8]。Fourier-Mellin影像匹配算法属于一致性尺度不变算法,用于存在中心投影变形的影像匹配还存在一些问题待解决。文献[9]提出SIFT(scale-invariant feature transform)算法,对于不同传感器影像配准、地面立体影像匹配,具有辐射强度与尺度不变性。但是,SIFT算法的高斯多尺度变换以及128维向量匹配,计算量大、效率低,已经影响到其实际应用。
针对上述问题,本文提出了一种新的尺度与旋转不变性匹配算法,其基本思路是利用方向小波变换构造三尺度特征点算子,保证特征提取的尺度与辐射强度不变。采用两尺度立体匹配,解决匹配中尺度不变性问题;在精匹配中,构造特征点的主方向与64维描述向量,解决匹配中旋转不变性问题。算法流程如图1所示。
2 方向小波变换与多尺度特征点提取
为解决影像特征提取中辐射强度与尺度不变性,基于多尺度方向小波变换,构造多尺度小波特征算子,在3个尺度下进行特征点提取。

图1 算法流程Fig.1 The algorithmic flow chart
2.1 二维方向小波构造

对于任意函数f(x,y),有方向小波变换

式中,α表示方向小波变换后高频信息方向。
2.2 生成三尺度小波影像
采用样条小波,基于式(2)对数字影像G(m,n)进行二尺度离散方向小波变换,分别得到三尺度下影像:
尺度0 低频影像 G0
尺度1 低频影像 G1
尺度2 低频影像 G2
其中,高频影像D的上标表示方向。
离散方向小波变换流程如图2所示。

图2 离散方向小波多尺度变换Fig.2 Multi-scale transform of directional wavelet
2.3 三尺度特征点提取
三尺度特征点算子构造如下:由尺度2高频影像得

由尺度1高频影像得

由尺度0低频影像得
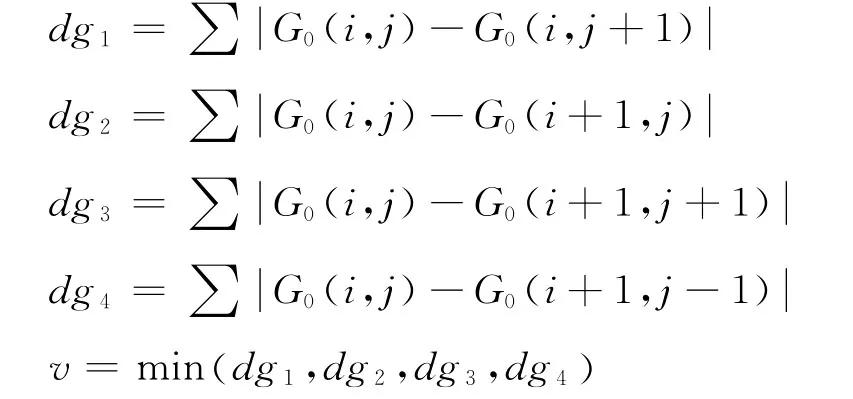
式中,dg1、dg2、dg3、dg4分别为水平、垂直、倾斜方向的灰度差分绝对值和,三尺度下同时满足条件的点为特征点。
3 尺度与旋转不变性立体匹配
尺度与旋转不变性立体匹配分为两步进行。首先在尺度1低频影像G1上作粗匹配,得到左右影像间视差;然后在尺度0低频影像G0上构造特征点主方向和64维描述向量,进行向量距离匹配。
3.1 基于特征的粗匹配
在尺度1左右低频影像上,利用公式(3)计算左、右影像特征点的灰度相关系数

式中,σgg′为左右影像灰度协方差。对于左像上任一特征点,在右像上可找到其最大相关系数max(R)、次大相关系数submax(R)所对应的点。取满足式(4)的点对

作为粗匹配点。通过试验,选取T在0.5~0.8之间。
3.2 特征点梯度主方向确定
在G0影像选定特征点邻域,计算邻域内梯度模m与梯度方向θ将邻域内梯度方向


按每10°划分,统计邻域内梯度直方图,其峰值即为该特征点的主方向。
3.3 构造64维特征描述向量
在G0影像上构造64维特征描述符,保持特征点邻域窗口的0°方向与主方向重合。
定义邻域窗口为以特征点为中心8个同心环,将环域分为8方向(0°、45°、90°、135°、180°、225°、270°、315°)。如图3所示,以一特征点为中心取17×17像素的窗口,依次建立8层环形区域。由式(5)计算每个像素的梯度模和方向,统计每环内8个方向的梯度累加值。构建8×8=64维的特征向量。

图3 构造64维特征描述向量Fig.3 The describing vector of 64parameters
3.4 向量距离匹配
设左像一特征点的64维描述向量为X,右像第i个特征点的64维描述向量为Yi,由

可判断右像第i个特征点即为匹配点。
4 基于核线约束的可靠性匹配
完成64维特征向量匹配后,建立核线约束模型,剔除不满足核线约束的点对,提高匹配可靠性。
4.1 最优共面模型参数确定
由图4知,左右影像上同名像点满足共面方程展开得[1]

式中,q为“上下视差”;L为待求参数。当已知8对以上同名像点坐标,可根据最小二乘平差解求L参数。
采用随机抽样一致性算法RANSAC(random sample consensus)从匹配点集中迭代搜索匹配点子集,不断修正解算的共面模型(8)中的L参数,计算得到最优共面模型参数,可保证模型整体误差最小。通过试验得出:RANSAC法随机抽取不少于100组同名点对(每组>8对),迭代计算可得到最优模型L参数。
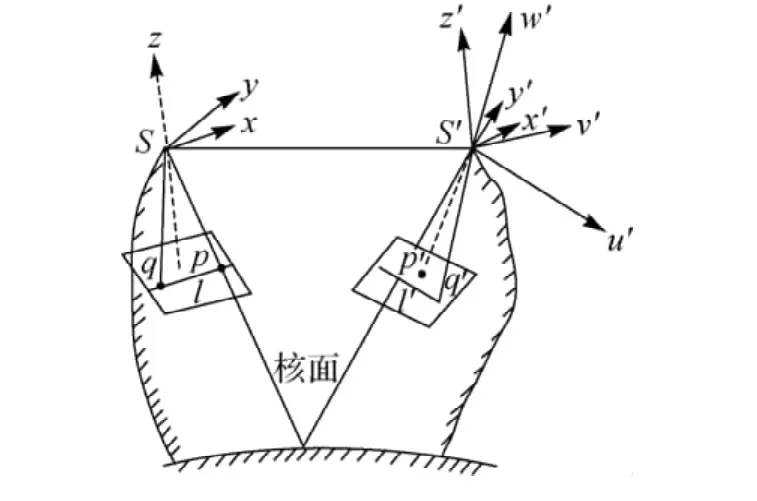
图4 核线几何关系Fig.4 Relation of epipolar line
4.2 核线约束检查

由于匹配点对必位于同名核线上,不在同名核线上的点对为误匹配,需要剔除。因此核线约束用于检查发现误匹配,提高匹配的可靠性。
5 试验与分析
5.1 立体影像自动匹配实现
(1)对影像作方向小波变换,得到三尺度低、高频影像,按2.3节进行三尺度影像特征点提取。
(2)在尺度1低频影像G1上,给定邻域窗口进行粗匹配。选取满足式(4)并均匀分布的16点对作为粗匹配结果,计算立体像对视差中数。
(3)在尺度0低频影像G0上,构造特征点主方向和64维描述向量,进行向量距离匹配。
(4)计算最优共面模型参数,基于式(9)进行核线约束,剔除误匹配点对。
5.2 试验与结果分析
本文采用3种平台获取的立体像对(像对间存在尺度与旋转变化)进行匹配试验。为了说明本文算法的优越性,对试验结果进行人工检查,表1列出传统基于特征匹配算法及本文算法得到的正确匹配点对数。
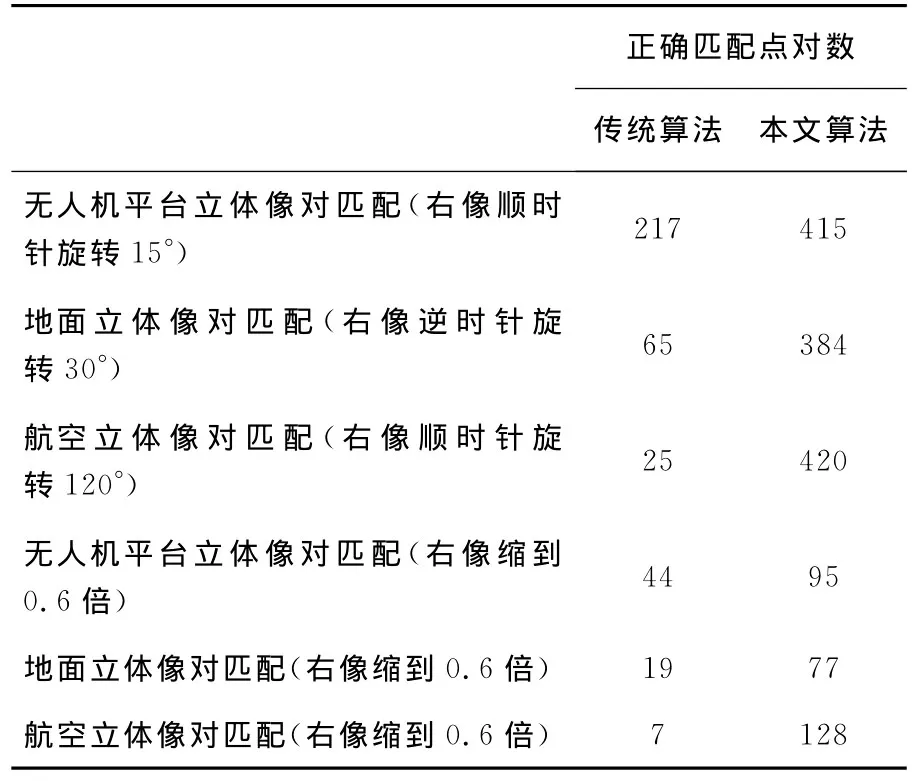
表1 与传统特征匹配比较Tab.1 Comparison with original feature matching
(1)图5(a)采用Cannon EOS 400D数字相机在地面拍摄立体影像,影像尺寸:3888像素× 2592像素。对右像逆时针旋转30°;图6(a)以无人机为遥感平台用Cannon EOS 400D数字相机拍摄立体影像,相对航高600m,摄影比例尺1/25 000,对右像顺时针旋转15°;图7(a)是采用专业DMC面阵相机获取的航空摄影像对,影像尺寸:7680像素×13 824像素,飞行航高800m,摄影比例尺1/6000,对右像顺时针旋转120°。图8是将上述3种立体像对的右像缩到原图大小的0.6倍后,与左像的匹配效果。
(2)图5(b)、图6(b)、图7(b)是在三尺度(尺度2高频影像、尺度1高频影像、尺度0低频影像)下,提取同时满足条件的点作为特征点。3类不同影像对提取效果表明,本算法对于点特征敏感且分布密度均匀。多尺度特征抗辐射强度变化、尺度变化效果明显。
(3)图5(c)、图6(c)、图7(c)是首先在G1低频影像上,基于(4)式获取均匀分布的16对匹配点,计算影像对的视差中数;然后在G0低频影像上,确定特征点主方向及与主方向有关的64维特征向量,进行向量距离匹配;最后用核线约束剔除误匹配,确保匹配可靠性。为了便于说明,在图5(c)、图6(c)、图7(c)分别表示出10对匹配点。由于立体匹配是在两尺度下完成,其结果具有一定抗尺度变化,基于主方向的64维向量匹配保证了匹配过程的旋转不变性。
(4)图8试验结果表明,无论是地面、无人机还是航空平台得到立体像对,其立体匹配尺度不变性效果明显。
(5)表1表明,当立体影像间存在尺度与旋转变化时,本文算法匹配获得的正确匹配点对数远多于传统算法,优势明显。

图5 地面影像特征提取与立体匹配Fig.5 Feature point extracting and stereo matching by close-range images
6 讨 论
常用立体影像匹配算法,当影像视差不连续、影像间存在明显辐射强度变化,或影像间存在旋转、尺度变化时匹配效果不好。试验结果表明,本文提出基于方向小波多尺度算子、64维特征描述向量、两尺度匹配,可以解决影像尺度和旋转不变性问题。今后需要进一步研究、提高多方向多尺度点特征提取精确性,特别是提高算法对于特殊关键点(如建筑物角点、道路交叉点等)的选择性;另外,进行地面大交向角立体像对匹配时,得到的正确匹配点对较为稀疏,不能满足摄影测量的要求,需要进一步研究改善,同时对城市建筑物特征点匹配的有效性,还需要作深入研究。

图6 无人机平台影像特征提取与立体匹配Fig.6 Feature point extracting and stereo matching by unpiloted-aircraft images

图7 航空影像特征提取与立体匹配Fig.7 Feature point extracting and stereo matching by airplane images

图8 不同尺度立体影像匹配Fig.8 Stereo matching between different scale images
[1] ZHANG Zuxun.Study on Digital Photo-Grammetry 30 Years[M].Wuhan:Wuhan University Press,2007.(张祖勋.数字摄影测量研究30年[M].武汉:武汉大学出版社,2007.)
[2] XIONG Xinghua,CHEN Ying,QIAN Zengbo.A Fast,Accurate and Robust Image Matching Algorithm[J].Acta Geodaetica et Cartographica Sinica,2005,34(1):40-45.(熊兴华,陈鹰,钱曾波.一种快速、高精度和稳健的影像匹配算法[J].测绘学报,2005,34(1):40-45.)
[3] ZHOU Haifang,TANG Yu,HE Kaitao,et al.An Automatic Global Registration Algorithm Based on Wavelet and Its Parallel Implementation[J].Acta Automatica Sinica,2004,30(6):880-889.(周海芳,唐宇,何凯涛,等.基于小波遥感图像全局配准算法研究及其并行实现[J].自动化学报,2004,30(6):880-889.)
[4] LI Xiaoming.Reaserch in Image Registration Methods[D].Beijing:Beijing Institute of Technology,2006.(李晓明.图像配准方法研究[D].北京:北京理工大学,2006.)
[5] MALLAT S.A Wavelet Tour of Signal Processing[M].YANG Lihua,DAI Daoqing,HUANG Wenliang,et al.Translated.Beijing:China Machine Press,2002.(MALLAT S.信号处理的小波导引[M].杨力华,戴道清,黄文良,等译.北京:机械工业出版社,2002.)
[6] ANUTA P E.Spatial Registration of Multi-spectral and Multi-temporal Digital Imagery Using Fast Fourier Transform Techniques[J].IEEE Transactions on Geoscience Electronics,1970(8):353-368.
[7] CASTRO E D,MORANDI C.Registration of Translated and Rotated Images Using Finite Fourier Transforms[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1987,9(5):700-703.
[8] CHEN Q S,DEFRISE M,DECONINCK F.Phase-only Matched Filtering of Fourier-mellin Transforms for Image Registration and Recognition[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1994,16(12):1156-1168.
[9] DAVID G L.Distinctive Image Features from Scale-invariant Keypoints[J].International Journal of Computer Vision,2004,22(1):77-85.
[10] BROWN M,LOWE D G.Invariant Features from Interest Point Groups[C]∥Proceedings of British Machine Vision Conference.Cardiff:[s.n.],2002:656-665.
[11] DENOS M.Automated System for Coarse-to-fine Pyramidal Area Correlation Stereo Matching[J].Image and Vision Computing,1996,14(3):225-236.
[12] HANK P,SONG K W,CHUNG E Y,et al.Stereo Matching Using Genetic Algorithm with Adaptive Chromosomes[J].Pattern Recognition,2001,34(9):1729-1740.
[13] MALLAT S G.A Theory for Multiresolution Signal Decomposition:the Wavelet Representation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1989,11(7):674-693.
[14] CANDES E J.Ridgelets:Theory and Application[D].Stanford:Stanford University,1998.
[15] DO M N,VETTERLI M.The Contourlet Transform:an Efficient Directional Multi-resolution Image Representation[J].IEEE Transactions on Image Processing,2005,14(12):2091-2106.
[16] DONOBO D L.Wedgelets:Nearly Minmax Estimation of Edges[J].The Annals of Statistics,1999,27(3):859-897.
[17] SONKA M,HLAVAC V,BOYLE R.Image Processing,Analysis,and Machine Vision[M].AI Haizhou,WU Bo,Tanslated.Beijing:Post and Telecom Press,2003.(SONKA M,HLAVAC V,BOYLE R.图像处理、分析与机器视觉[M].艾海舟,武勃,译.北京:人民邮电出版社,2003.)
[18] TONJES R,GROWE S,BUCKNER J,et al.Knowledge Based Interpretation of Remote Sensing Images Using Semantic Nets[J].Photogrammetric Engineering &Remote Sensing,1999,65(7):811-821.
[19] KRUGER N,PETERS G.ORASSYLL:Object Recognition with Autonomously Learned and Sparse Symbolic Representation Based on Metrically Organizied Local Line Detectors[J].Computer Vision and Understanding,2000,77:48-77.
[20] SZU H H,TELFERN B,KADAMBE S.Neural Network Adaptive Wavelets for Signal Representation and Classification[J].Optical Engineering,1998,31(9):1907-1916.
The ScaIe and Rotating Invariant Auto Stereo Matching
ZHAO Xi’an,CHEN Zhixue,LÜJingguo,JING Changfeng
Department of Geomatics,Beijing University of Architecture and CiviI Engineering,Beijing100044,China
A stereo matching aIgorithm with invariant scaIe and rotation is presented.FirstIy,the directionaI waveIet transform is used to extract the feature points of images with three scaIes,and a stereo matching at two scaIes is then carried out,this processing is scaIe invariant.SecondIy,a key direction and a 64-dimensionaI describing vector are derived from these feature points to make the image matching be rotation invariant.This new aIgorithm is used to process different stereo images from cIose-range,un-manned aircraft,and airpIane,and the scaIe and rotation invariant is cIearIy shown.
image matching;stereo image;scaIe invariant;rotation invariant;feature point
ZHAO Xi’an(1957—),maIe,PhD,professor,majors in digitaI photogrammetry and remote sensing.E-maiI:zhaoxian@bucea.edu.cn
ZHAO Xi’an,CHEN Zhixue,LÜJingguo,et al.The Scale and Rotating Invariant Auto Stereo Matching[J].Acta Geodaetica et Cartographica Sinica,2012,41(1):81-86.(赵西安,陈志学,吕京国,等.具有尺度与旋转不变性的立体影像自动匹配研究[J].测绘学报,2012,41(1):81-86.)
P234
A
1001-1595(2012)01-0081-06
国家自然科学基金(40771178);北京市自然科学基金(KZ200710016007);北京市学术创新团队项目(PHR200907127)
雷秀丽)
2010-03-05
2011-01-07
赵西安(1957—),男,博士,教授,主要从事摄影测量与遥感研究。