油茶果采摘机工作空间的分析及优化
2012-01-04左二兵李立君高自成刘银辉
左二兵,李立君,高自成,刘银辉,李 昕
(中南林业科技大学 机电工程学院, 湖南 长沙 410004)
油茶果采摘机工作空间的分析及优化
左二兵,李立君,高自成,刘银辉,李 昕
(中南林业科技大学 机电工程学院, 湖南 长沙 410004)
油茶果采摘机是工作在非结构环境下的机械系统,结合油茶树的生物学特性和栽培方式等因素,利用边界法求解采摘机执行机构的工作空间,建立以满足采摘机作业空间最小、各臂臂长之和最小为优化目标,得到优化后的执行机构结构参数;在求出执行机构位移正解的基础上,基于matlab蒙罗卡洛法对采摘机的工作空间进行仿真与分析,验证了采摘机结构参数设计的合理性。
采摘机;工作空间优化;蒙罗卡洛法;仿真分析
油茶果采摘作业是油茶生产最重要的环节之一,季节性强,劳动强度大。随着我国人口老年化的加剧和农村劳动力的不断减少,研究开发油茶林果采摘机具有重大意义[1]。油茶果采摘机工作空间是指其执行机构末端所能达到的空间点的集合,工作空间的大小代表了采摘机的活动范围[2],采摘机执行机构如图1所示,图中各点表示执行机构各节点位置。根据采摘机执行机构的结构分析,为实现采摘作业在空间的任意位置,需要6个自由度,一般设计成二个连杆系统。前三个自由度构成的连杆组成主连杆系统,又称为“手臂”,尺寸较长,主要用来确定末端的空间位置;后三个自由度构成的连杆系统尺寸较小,主要用来调整姿态。根据国家标准,工作空间主要由主连杆的几何参数决定。因此,油茶果采摘机的工作空间优化及分析实际上是分析执行机构几何尺寸和各关节范围,而且为了更好的满足采摘作业的要求,尺寸尽可能小[3-5]。
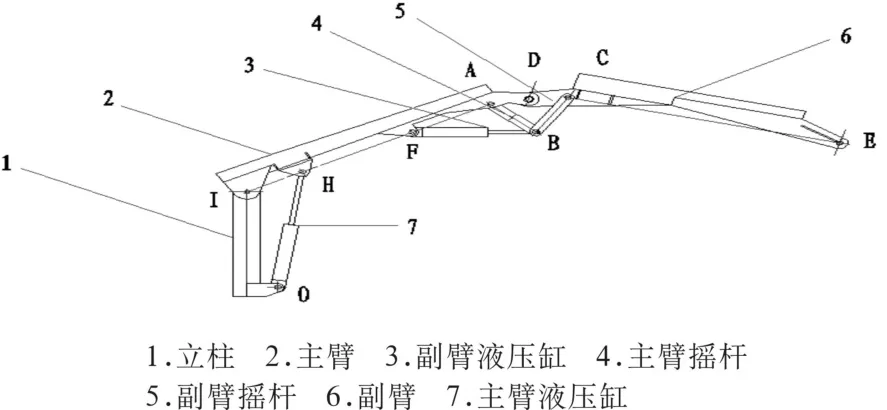
图1 采摘机执行机构Fig. 1 Actuator of picking machine
1 工作空间的确定
1.1 油茶果分布空间的确定
油茶果的分布如图2所示。根据对油茶林基地的实地考察,油茶果树高度一般为2 800~3 200 mm,树冠直径在4 500 mm左右,油茶果分布在300~3 000 mm之间,约80%的油茶果分布在油茶树的表面。为简化空间综合问题,确定油茶果的分布空间为4 500 mm×4 500 mm×2 700 mm。
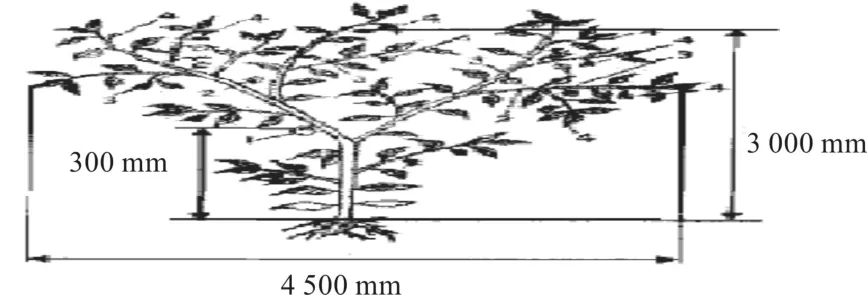
图2 油茶果的分布Fig. 2 Camellia fruit distribution
1.2 采摘机工作空间的求解
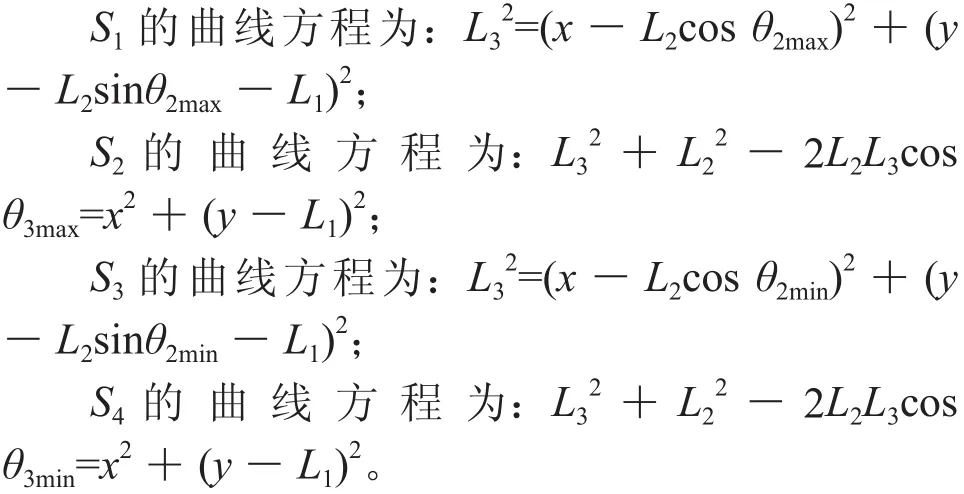
本研究的采摘臂自由度较少,因此采用图解法和数值法相结合的形式来求解采摘臂的工作空间。采用固定一个限制角的分段作图法作出采摘臂末端E点在XOY面的工作空间图,如图3所示。工作空间边界由4条曲线S1、S2、S3和S4组成。
根据油茶果的分布图,确定所要求的工作空间为4 500 mm×4 500 mm×3 000 mm的立方体。通过分析可知,工作空间内满足油茶果的分布空间图问题可以转化为平面内b×h的问题,如图4所示。因为在满足b×h之后,立柱需要绕Y轴旋转相应的θ1角度,就能实现要求的工作空间问题。因此,只需要研究执行机构工作空间满足b×h的矩形问题,就可以完成采摘机工作空间的优化问题。
2 工作空间的优化
2.1 设计变量的确定
设计变量包括立柱高L1,主臂L2,副臂L3,主臂转角θ2,副臂转角θ3,即:
X=[L1,L2,L3,θ2min,θ2max,θ3min,θ3max]=[x1,x2,x3,x4,x5,x6,x7]。
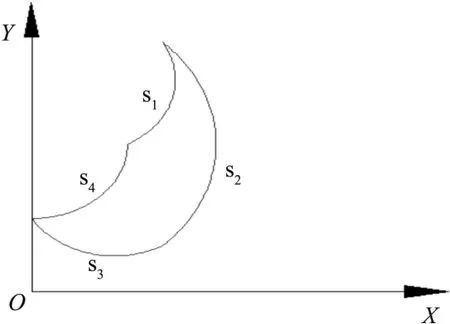
图3 工作空间边界Fig. 3 Working space boundary
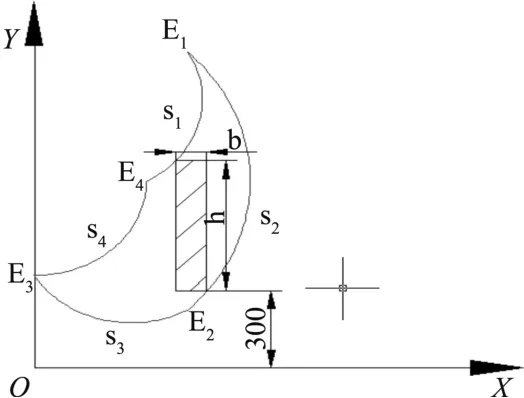
图4 工作空间位置Fig. 4 Working space location
2.2 数学模型的建立
恰当的数学模型的建立是优化设计的关键步骤。采摘机的数学模型包括两部分内容:第一是建立目标函数的数学模型;第二是建立优化时的约束条件。数学模型的建立,应既要保证设计变量所有一定的可行域,又要保证机构的每一方面都有合理的要求。
2.2.1 目标函数的确定
目标函数1:在满足作业要求的情况下,要求采摘臂结构最轻,采摘臂各臂的长度尺寸之和应为最小,即目标函数为:

目标函数2:采摘臂的工作空间S与油茶果采摘臂所要求的空间S′之差F2(x)最小,于是实际对工作空间的研究就归结为对其截面大小的研究。设采摘油茶果的生长分布范围为区域ABСD,其坐标值分别为:A(a,b),B(a,d),C(c,d),D(c,b),由此可以确定目标函数:

工作空间主截面是四条圆弧组成的,如图5所示。现将工作空间分S2和S3两部分,分析易知,S1=S3。工作空间总面积S=S1+S2,其中S1,S2均在圆C1和圆C2之间,已知主臂的旋转角度θ2,可得出:

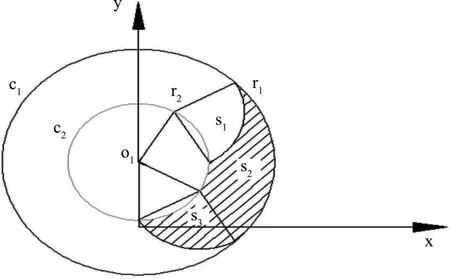
图5 采摘臂工作空间Fig. 5 Picking arm’s working space
通过上述可知,得到采摘臂工作空间优化的两个目标函数,在优化过程中合并为一个目标函数的形式为:

式中k1,k2为加权系数且k1+k2=1,设计者可根据具体要求取值,现取这两个目标函数权重相同,即:k1=k2=0.5
2.2.2 约束条件的确定
确定油茶果采摘机工作空间边界曲线关键在于确定边界上的极限点。约束条件主要包括轨迹区域约束、各臂长度约束和关节变量约束。
(1)轨迹区域约束
如图6所示,执行机构工作空间区域应包含所要求的作业空间区域(图中阴影),所以根据工作空间边界的四条圆弧,得到如下几个重要极限点的约束条件。
分析可知,最低极限点出现在S3圆弧段,当x=a时,

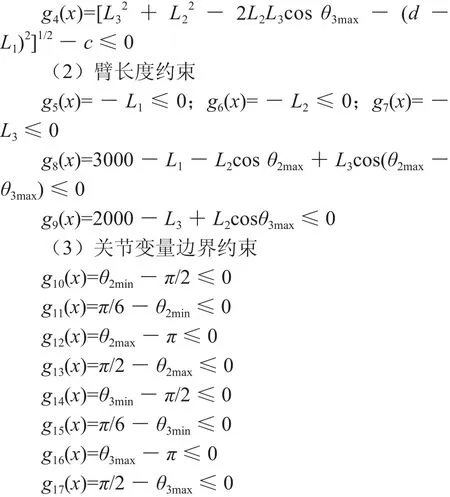
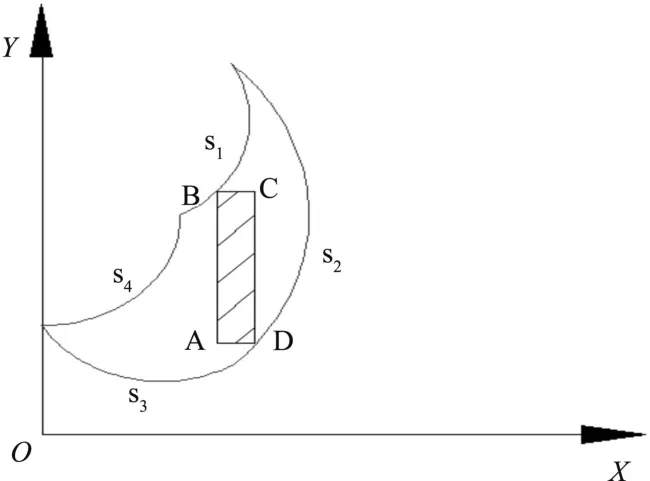
图6 油茶采摘臂工作空间平面Fig. 6 Camellia picking arm’s working space plane
2.3 优化计算结果与分析
根据油茶林果采摘的生长范围,对a,b,c,d赋初值分别为:a=1 500,b=300,c=1 900,d=2 800。油茶林果采摘机工作空间优化是一个多目标非线性优化问题,该优化具有2个目标函数,7个设计变量,17个约束条件,且都是不等式约束。使用matlab软件的优化工具箱进行编程运算。得到优化结果为:

上述优化值臂长和关节值都是极值,采摘机的精度要求一般较低,这样有利于了控制成本,因此将结果进行圆整为:L1=960mm,L2=1 180mm,

3 工作空间仿真与分析
采用蒙特卡洛方法在matlab软件上描绘出采摘臂工作空间形状,利用D-H算法求出执行机构末端在参考系中的坐标方程为:

式(3)中:Px、Py、Pz分别为采摘臂末端在x轴、y轴、z轴上的坐标值;θ1、θ2、θ3分别为立柱、主臂、副臂关节变量;L1、L2、L3分别为采摘臂立柱、主臂、副臂臂长。
设定循环次数N,利用随机函数产生N个0-1之间的随机值,RAND j(j=1,2,…,N),由此产生一随机步长 (-)xRANDj,则采摘臂关节变量的随机值为:

式(4)中:θ1为关节变量随机值;,分别为关节变量的极限值;为关节数目;i=1,2,3,4。
上式循环N次,就会产生N个随机值,将关节变量的值按由大到小的顺序带入采摘臂的正运动学方程,得到执行机构末端位置在参考坐标系中的位置向量,然后将这些位置向量按一定的比列,以打点的方式显示在matlab的图像设备上,即为油茶果采摘机工作空间图。
图7~图9中各图坐标对应各自图号,单位均为mm。如图7所示,采摘臂工作空间三维图工作空间内部密集且均匀;从图8中可以看出采摘臂末端可以达到的位置距离采摘机基座最大距离可接近2 500 mm,最大高度能达到3 000 mm;图9和图10中相对应与XOY平面和YOZ平面的运动位置。仿真结果表明,能够满足采摘机作业要求,验证了工作空间优化的合理性。
4 结 论
油茶果采摘机工作空间分析及优化是理论和实际密切联系的典例。工作空间是设计采摘机时首要考虑的问题。提出了一种三杆四自由度的执行机构,采用边界法求得其工作空间,油茶采摘机的工作空间与油茶果分布空间的关系进行优化,通过建立数学模型并求解得出了满足作业空间要求的执行机构的结构尺寸和采摘臂各臂的转角范围,为油茶果采摘机试制提供了理论依据。
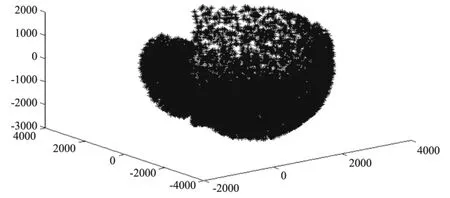
图7 采摘机工作空间三维图Fig. 7 3D map of picking machine working space
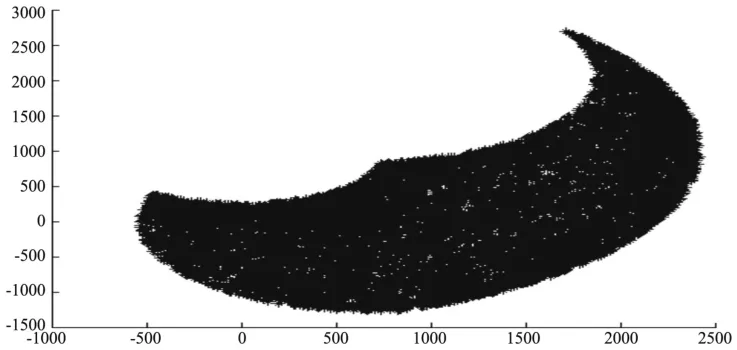
图8 工作空间在平面XOZ上的投影Fig. 8 Projection of working space on plane XOZ
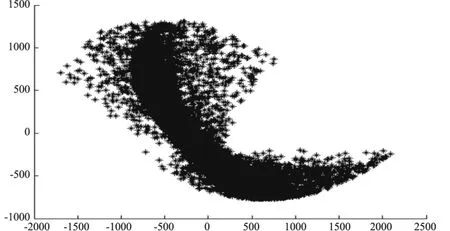
图9 工作空间在平面XOY上的投影Fig. 9 Projection of working space on plane XOY
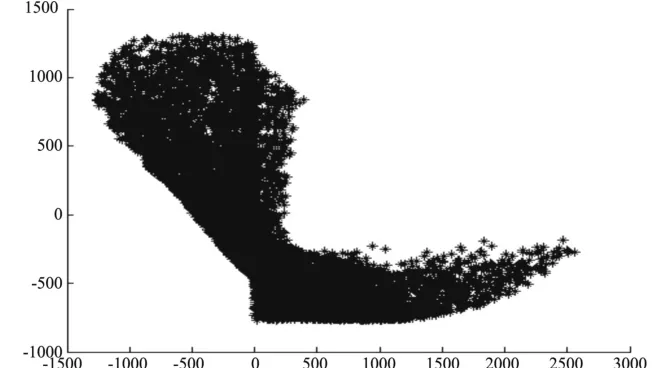
图10 工作空间在平面YOZ上的投影Fig. 10 Projection of working space on plane YOZ
[1] 方建军.移动式采摘机器人的研究现状与进展[J].农业工程学报, 2004(2):273-278.
[2] 朱遂伍,孙杏初.关节型工业机器人工作空间及结构尺寸参数的一种确定方法[J].机械科学与技术, 1995,(3):41-43.
[3] 蔡 颂,李立君,高自成.基于Pro/ENGІNEER坚果采摘臂的建模及运动仿真分析[J].中南林业科技大学报, 2010,(4):10-13.
[4] 何春燕,何允纪,浦纪寿.HP99型堆垛机器人结构参数的优化设计[J].江苏理工大学学报, 2000,21(3):42-45.
[5] 梁喜凤,苗香雯,崔绍荣,等.果实采摘机械手机构设计与工作性能分析[J].农机化研究, 2004,(2):133-135.
Working space analysis and optimization of Camellia fruit picking machine
ZUO Er-bing, LІ Li-jun, GAO Zi-cheng, LІU Ying-hui, LІ Xing
(School of Mechanical and Electrical Engineering, Сentral South University of Forestry and Technology, Сhangsha 410004, Hunan, Сhina)
Camellia fruit picking machine is a mechanical system working in the environment of non-structural. Сombined with the Camellia tree’s biological characteristics and the factors such as cultivation patterns etc., the boundary method was used to solve the working space of fruit pick actuator machine, and the optimization objectives that were set up to meet the minimum picking machine working space and the minimum sum of all arm length, thus obtaining the optimal actuators structure parameters. Through solving the positive solutions of actuator machine displacement, based on Matlab software and los method, the machine working space of the machine was simulated and analyzed, and the rationality of the machine structure parameter design was verif i ed.
picking machine; working space optimization; llong with los method; simulation analysis
S776
A
1673-923X (2012)05-0191-04
2012-03-13
国家林业公益性行业科研专项经费项目(201104007-07);湖南省研究生科研创新项目(СX2011B327);长沙市科技计划项目(k1005021-21)
左二兵(1986-),男,硕士研究生,主要从事林业机械化的研究;电话:15874263977;E-mail: zuoerbing@163.com
李立君(1964-),女,教授,博士,博士生导师,主要从事现代林业技术装备的研究
[本文编校:欧阳钦]
