电测法在压力机吨位标定中的应用
2011-12-11赵晓龙
赵晓龙
吨位负荷计是机械压力机显示冲压吨位的唯一指示设备,在生产过程中起着非常重要的作用。下面介绍一种标定负荷计的方法及气液式带电控联锁过载保护装置的设定方法。
1 工作原理
本动态测试系统的一次仪表为压力传感器,二次仪表为Liberty数据采集器,数据采集器直接与计算机相连(见图1)。

图1 动态测试系统组成
1.1 桥式电路
本文采用等臂直流电桥,8个应变片的分布在中间位置对称的四个方向(见图2、图3)[1]。
因为选用的电桥为桥臂电阻R1+R3=R2+R4=R6+R8=R5+R7=2R的等臂电桥。在电桥的一个对角线ab接入电源电压Uab,再由另外一个对角线cd输出不平衡电压Ucd。因此将ab两端称为电源端,cd两端称为测量端。当四个桥臂电阻满足条件:)时,cd两端电位相等,Ucd=0,电桥平衡。而当其中一个电阻发生改变时,平衡条件就被破坏,c、d之间将出现电位差Ucd。因此,Ucd的大小可以用来度量桥臂电阻的改变,并进一步计算出桥臂应变的大小。

图2 传感器应变片分布图

图3 线路连接图

式中,Uab—电波电压(mV);Ucd—输出不平衡电压 (mV);R1、R2…R8—电阻 (Ω)。
设Ri=R+ΔRi,并且每个桥臂上的两个应变片变化量相等,带入上式,一般情况下,由于ΔR很小,即R≫ΔR,略去上式中的高阶微量,并利用再由 ε2=ε6=ε,ε1=ε5=-με 得到:

上式表明:
(1) 当R>>ΔRi时,输出电压Ucd与应变成线性关系;
(2)若相邻两桥臂的应变极性一致,即同为拉应变或压应变时,输出电压为两者之差;若相邻两桥臂的极性不同,即一为拉应变,另一为压应变,到输出电压为两者之和;
(3)若相对两桥臂应变的极性一致,输出电压为两者之和;相对桥臂应变的极性不同时,输出电压为两者之差[1,2]。
1.2 测试电路的优点
测试电路的温度自补偿 本测量线路采用全桥温度自补偿的方法,每个应变片包含一个轴向电阻栅,一个横向电阻栅,轴向电阻栅感受轴向应变;横向电阻栅上不感受轴向应变。因此,当八个应变片同时处于一个温度场中,由温度变化引起的桥臂应变电阻变化对测试数据的影响可以相互抵消,从而起到温度补偿的作用[3,4]。
消除弯曲应力 假设传感器向A点方向产生弯曲现象,则R1受到压缩,电阻减小ΔR,同时R3会受到拉伸,电阻增加ΔR,所以桥臂R=R1-ΔR+R3+ΔR,电阻值没有发生变化,从而达到消除弯曲应力的目的。由于传感器在4个方向的应变片为对称分布,所以在向其它方向弯曲时,也可以达到同样的效果。
提高信噪比 由于采用全桥测量线路,每个桥臂用两个电阻片串联,使整个电桥的输入电阻提高1倍,在数据采集器过载保护电流一定的情况下,可以提高1倍的激励电压Uab,从而将得到的数据信号增大1倍,而杂波干扰信号没有增大,经仪器滤波放大后,信噪比提高1倍。
1.3 干扰源及抑制措施
(1) 干扰源分析
电磁干扰 应变片的信号在通过测量导线输入应变仪时的数值非常微小,电桥输出电压通常为毫伏级,有时甚至只有若干微伏。因此当外界电磁场发生变化时,就会受到电磁干扰。
静电干扰 当应变片的测量导线和干扰源之间存在漏电容C时,就可能在测量导线中产生静电干扰。
地电压、地电流的干扰 由于本系统采用的Liberty数据采集器为交流式电源,为保证操作人员安全,仪器外壳要接通大地。但在某些工厂里,相隔几米的地电位差会高达几伏;某些地区的地电位还会发生波动。此外在测试现场,如果发生雷电、电力线开闭、电源事故、负载变化时还会产生地电流[1,5]。
(2) 抑制干扰措施
首先,应将测量导线扭绞扎成麻花辨状,以减少干扰磁通的耦合面结,并使每一绞的感应电流与下一绞的感应电流相反以相互抵消。此外,在扭绞线外面采用金属屏蔽套以防止静电干扰。在此基础上,尽可能缩短测量导线长度,增大测量导线与干扰源距离,或改变测量导线方向,使其与电力线垂直布置以减小电磁干扰和静电干扰。采用电源供电时信号电路必须一点接地,如采用电池供电,则将屏蔽套接仪器外壳但不接地以抑制地电压、地电流干扰。
2 负荷计标定
(1)工具准备及布置
压力机加载所需工具包括:Liberty数据采集器,拉压力传感器,加载架,隔板垫铁4件,铝板每台4件,调整垫片。
在加载台上面依次摆放大片薄铁板、加载架、拉压力传感器、垫铁、调整垫片及保护铝板。4个传感器分别对应负荷计的4个通道,同时防止偏载(见图4)。
(2) 初始设置
打开负荷计调节开关,先调零点,设置负荷计初始增益,初始值设置成50,使负荷计显示数值和Liberty数据采集器所显示数值相近。外部凸轮信号设置为 90°~210°。

图4 传感器位置图
(3) 加载顺序
缓慢向下调节滑块的封闭高度,在滑块到达下死点,传感器刚有数据显示后通过调整垫片进行初步调平。然后缓慢加载,先每一次向下调节1 mm,在总吨位100~200 t时,再次精确调平,确保4点受力均匀。继续加载至满负荷70%~90%,精确调节负荷计增益,使负荷计显示数据和数据采集器显示数据相对应。继续加载,当达到满负荷110%时候停止。
3 过载保护系统设定
液压保护系统原理是指随着压力机冲压压力不断升高,液压缸内的油压也随之升高,当油压产生的压力大于调节风压产生的压力时,保护阀中的活塞及保护阀上面的顶针开始动作,缸内油压降低,同时上面的限位开关发出停车信号,通过电气控制压力机停车。液压保护系统是通过调节托起保护阀顶针的风压设定缸内油压能够达到的最大压强,从而达到保护压力机的目的(见图5)。
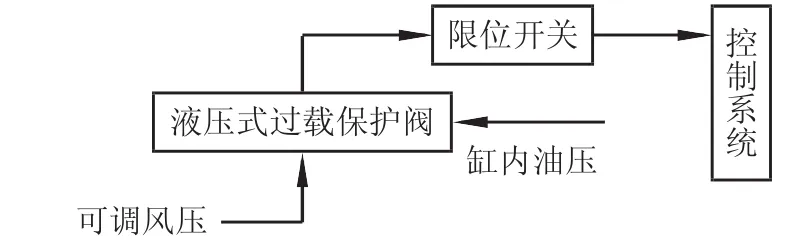
图5 气液压保护系统结构示意图
在过负荷试验中,当压力机压力达到满负荷时的100%,缸内油压将达到最大值,此时,慢慢向下调节托起保护阀顶针的风压,使压力机过载停车,然后向上微调压下量,使冲压压力稍微降低,如压机仍能正常工作,则再往下调节压下量,如压机停车,说明风压已调节合适,拧紧备紧螺母,过载保护阀设置完毕。
4 标定效果
通过对某2000 t压力机负荷计的标定数据统计可知,在大吨位冲压下,各传感器和压下量有很好的线性关系,能够满足标定负荷计所需要的精度和线性度。在总压下量为10.37 mm时,压力机达到满负荷时的108%,满足100%~110%的设计要求。当保护气压设置为0.36 MPa时,能使压力机在达到满负荷后过载停车(见表1)。

表1 标定过程数据表
5 结语
本方案采用笔记本电脑和Liberty数据采集器代替光线示波器,测量精确度更高,现场测试和数据处理方便。
[1]吴宗岱陶宝祺.应变电测原理及技术 [M].国防工业出版社.1982,121~128.
[2]芦晶.叶根加载装置载荷精度的实验研究 [J].一重技术.2008年4期.
[3]沙占友.集成化智能传感器原理与应用 [M].北京:电子工业出版社.2004-01.
[4]吴仲城,戈瑜,虞承端,方廷建.传感器的发展方向——网络化智能传感器 [J].电子技术应用,2001,(2).
[5]焦续伟.工程测试过程中抑制干扰的几种方法 [J].一重技术.2008年4期.
