红外成像导引头模糊PD控制器设计与仿真*
2011-12-07张向锋李言俊
张向锋,李言俊
(西北工业大学航天学院,西安710072)
0 引言
红外成像导引头具有灵敏度高、能够在复杂背景条件下识别目标、抗电磁干扰能力强、打击目标种类多、全天时工作、能够实现发射后不管等特点,已成为世界各国军事应用中重点研究和竞相发展的关键技术之一[1]。导引头预定回路的主要功能是实现光轴预置,将导引头的光轴预定指向需要的方向,减小目标截获时间,提高目标截获概率。
模糊控制与经典PID控制相比具有无需建立被控对象的数学模型,对被控对象的时滞、非线性和时变性具有一定适应能力等优点,同时对噪声也具有较强的抑制能力。文中将模糊控制与经典PID控制优点相结合设计了一种模糊PD控制器,使红外成像导引头预定回路具有良好的动态性能与跟踪精度。
1 红外成像导引头预定回路数学模型
1.1 红外成像导引头预定回路组成原理
预定回路主要由控制器、伺服系统、成像系统、电位计和A/D转换电路组成。其原理框图如图1所示。控制器根据预定信号up以及成像系统光轴实际角位置uφ的角误差信号形成角速率指令控制随动系统以规定的速度转动来消除角误差,完成红外成像导引头光轴的预定功能。
1.2 红外成像导引头伺服系统数学模型
写出电机电枢回路电压平衡方程:

式中:Ri为功放电路输出电阻,一般可忽略;Rd为电机电枢电阻;Ke为电机反电动势导数;ua为电源电压。电机电枢电流Id与电磁转矩Md有以下关系:
式中,Km为电机力矩系数。
按牛顿第二定律给出力矩平衡方程:

式中:Mc为静摩擦力矩;Ωd为电机转速;Mφφ为引线阻力矩;φ为框架角;Jd为电机电枢转动惯量;Jp为负载转动惯量。
导引头框架角按下式计算:

1.3 红外成像导引头伺服系统数学模型简化
忽略干扰力矩并忽略非线性影响,红外成像导引头伺服系统数学模型推导简化为:

式中:

导引头框架角为:
通过计算给出伺服系统简化的数学模型为:

2 模糊PD控制器设计
基本模糊控制系统包括模糊化处理、模糊推理和清晰化控制三个环节,模糊PD控制器控制框图如图1所示[2]。
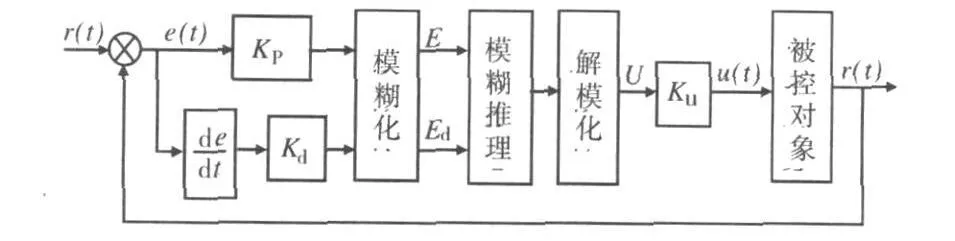
图1 模糊PD控制器框图
在模糊PD控制器中引入增益Kp和Kd分别对误差信号及误差变化率信号进行规法处理,使其值域范围与模糊变量的论域相吻合。通过对误差信号和误差变化率信号进行模糊化、模糊推理及反模糊得到精确的控制量U,通过规范化增益Ku后就可以得到控制信号u(t)。
2.1 设计技术指标要求
红外成像导引头预定回路设计技术指标要求:
1)预定角10°范围内上升时间小于0.15s,超调量小于10%;
2)弹体正弦扰动幅值1.5°、频率3Hz情况下,预定误差小于0.5°。
2.2 模糊集定义及其隶属函数
采用误差及误差的变化率构成的二维模糊控制器,定义模糊集:
e={NB,NM,NS,ZO,PS,PM,PB}({负大 ,负中 ,负小 ,零,正小 ,正中,正大})
de={NB,NM,NS,ZO,PS,PM,PB}({负大,负中,负小,零 ,正小,正中,正大})
u={NB,NM,NS,ZO,PS,PM,PB}({负大,负中,负小,零 ,正小,正中,正大})
其中,e、de分别表示误差及误差的变化率的模糊集,其隶属函数如图2所示,u为控制量的模糊集,隶属函数如图3所示。

图2 e和de的隶属函数
模糊化处理就是将模糊控制器输入量的确定值转换为相应模糊语言变量值的过程,此相应语言变量值均由对应的隶属度来定义。通过把输入变量映射到合适的响应论域量程的过程,精确的输入数据就变换成适当语言值或模糊集合的标识符。
2.3 模糊规则
建立误差及误差变化率的模糊量与控制信号模糊量之间的关系,采用重心法将模糊输出精确化,给出模糊控制的模糊规则如表1所示。

表1 模糊控制规则表
3 仿真
取模糊控制器中增益Kp=2,Kd=1/13,Ku=1.1。预定角指令为5°,导引头预定回路数字仿真结果曲线如图4所示,从图中可以看出,导引头预定回路上升时间为0.09s、超调量为2%,满足指标要求。当预定角指令为 10°,弹体正弦扰动幅值为1.5°、频率为3Hz,导引头预定回路数字仿真结果曲线如图5所示。从图中可知,弹体扰动条件下预定误差为0.35°,满足技术指标要求,说明所设计的模糊PD控制回路有良好的动态性能和跟踪精度。

图4 预定回路阶跃响应曲线

图5 弹体扰动条件下预定回路阶跃响应曲线
4 结论
文中建立了红外成像导引头预定回路伺服系统的数学模型,并通过推导给出了用于控制器设计的简化模型,采用模糊PD控制设计了导引头预定回路控制器;对导引头预定回路进行仿真分析的结果表明,采用模糊PD控制的导引头预定回路具有良好的动态性能和跟踪精度。
[1]张义广,杨军,朱学平,等.非制冷红外成像导引头[M].西安:西北工业大学出版社,2009.
[2]薛定宇.控制系统计算机辅助设计[M].北京:清华大学出版社,2006.
[3]耿峰,祝小平.精确制导武器红外成像导引头控制系统研究[J].宇航学报,2007,28(3):535-538.
[4]Chen Guanrong,Hao Ying.Stability analysis of nonlinear PI control systems[C]//IEEE IFIS 1993 Third International Con-ference,1993:128-133.
[5]张化光,何希勤.模糊自适应控制理论及其应用[M].北京:北京航空航天大学出版社,2002.
