一种用于海浪方向谱探测的星载微波海洋波谱仪系统
2011-12-03黄琼,丁虎,黄勇
黄 琼, 丁 虎, 黄 勇
(上海无线电设备研究所,上海200090)
0 引言
海浪是一种海洋波动现象,是海洋观测的一个重要研究领域,研究海浪的生成、成长、消衰及传播机制,对于国防、灾害预报、航运、海上石油平台的建设等具有重要意义。海浪方向谱是描述海浪关于波数能量分布的一个物理量,在线性理论框架下,海浪在某个时空的所有统计性质,均可由海浪方向谱获得[1]。
因此,对于海浪方向谱的研究近年来备受关注,在军事方面可为航行安全、航路选择、兵力展开的距离和时间、舰上武器控制系统等提供直接可用的辅助决策信息;民用方面可用于大面积海浪预报、海洋工程建设等;此外在理论研究领域也具有一定的实用价值。
应用传统的现场观测方法难以获得大面积的测量数据和较可靠的方向谱,海洋卫星遥感技术以其间接的、大范围的测量方式成为弥补传统测量方法不足的新手段。
雷达高度计的应用最为广泛,但其只能测量海面高度和有效波高;合成孔径雷达(Synthetic Aperture Radar,SAR)是目前主要采用的测量海表波浪谱的星载技术,多个国家的卫星均装载了SAR传感器进行海浪遥感方法的研究,并取得了一定的研究成果,但其在估计海洋方向谱特性时存在以下几个主要缺陷:
a)海表沿方位向的运动会造成图像谱的扭曲;
b)由于图像谱和波浪谱之间的非线性关系,在反演海浪谱时需要输入额外的数据(波浪场或者风场)作为第一猜测谱进行迭代计算;
c)获得海浪信息资料的费用昂贵,不易普及。
因此限制了SAR在海浪方向谱探测中的发展[2]。
鉴于高度计和SAR的以上种种限制,部分学者将目光投向了真实孔径雷达传感器——微波海洋波谱仪,其中最具代表性的有美国国家宇航局的Ku波段机载雷达系统 ROWS(Radar Ocean Wave Spectrom eter)、欧空局与法空局合作的C波段机载雷达系统RESSAC(Radar pour l'Etude du Spectre de Surface par Analyse Circulaire)和法国学者Hauser等研制的Ku波段星载雷达系统SW IM(Surface Waves Investigation and M onitoring)[3-6]。但上述系统均是通过一维机构驱动扫描和馈源阵列来实现不同入射角的波束指向,扫描天线转动惯量产生的角动量对卫星姿态会产生一定的影响,导致可靠性降低,且在一次数据采集时间内波束沿扫描方向会发生距离徙动。此外,扫描机构的体积与重量是限制其应用的另一重要原因。
本文针对以上缺点提出一种微波海洋波谱仪系统,采用相控阵馈源和抛物面天线组成天线系统,以电扫代替机扫,极大地提高了可靠性,并能有效去除方位向徙动的影响。
1 海浪探测基本原理
在小入射角情况下,后向散射机制主要为垂直于雷达观测方向的小平面的准镜面反射,海面可看作是由长波浪以及叠加在其上的均匀高度短波浪组成,雷达接收的后向散射信号是由波长为测量电磁波波长3至5倍的短波直接贡献,但长波对短波具有倾斜调制作用。
图1所示为倾斜调制示意图,在小入射角、长波波陡小于10%及方位向的足迹的宽度大于对应方向表面相关长度的条件下,可以忽略水动力调制,线性的倾斜调制起主要作用[5]。海浪方向谱反演基本原理为通过波谱仪接收的能量计算长波信号调制进而得到信号调制谱,由调制谱与海面波陡谱之间的线性关系得到波陡谱,从而计算出海浪二维方向谱,进而可以获得海浪其他统计性质。
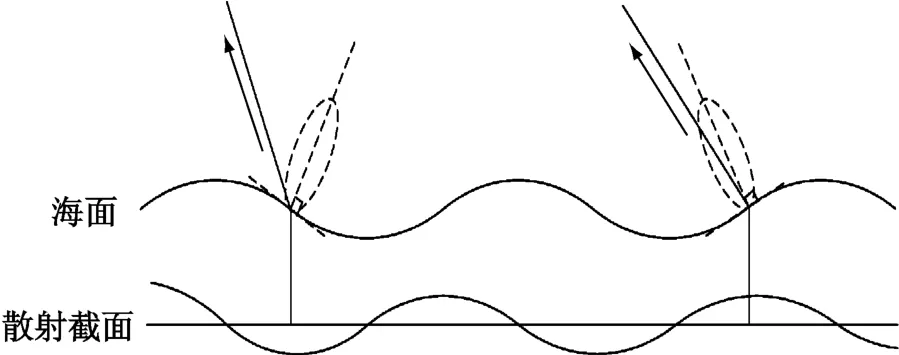
图1 海浪探测基本原理
2 星载微波海洋波谱仪工作原理及系统组成
星载微波海洋波谱仪是一种通过小入射角圆锥扫描实现从空间多方位角观测海浪方向谱的主动微波遥感雷达系统。其工作在Ku波段,采用多波束分时观测来平衡小入射角与较大入射角之间的优缺点,在获得高空间分辨率的同时,使反演出的海浪方向谱更加精确。六个波束的入射角分别为 0°,2°,4°,6°,8°,10°,这种阶梯式的波束既保证了探测的刈幅覆盖范围,同时可以获取探测区域更多的信息量。
星下点即0°入射角波束的工作机制相当于一个雷达高度计,可测量星下点的海面高度和有效波高。非星下点的五个波束相当于一个真实孔径雷达系统,通过方位向的360°圆锥扫描测量反演出海浪方向谱,从而提取出波长、波向等参数。
2.1 系统组成
星载微波海洋波谱仪工作在Ku波段,主要由抛物面天线、相控阵馈源、波束控制、内校准控制单元、高频接收组件、中频接收机、微波信号源、数字信号处理单元等部分组成,图2给出了星载微波海洋波谱仪系统组成框图。
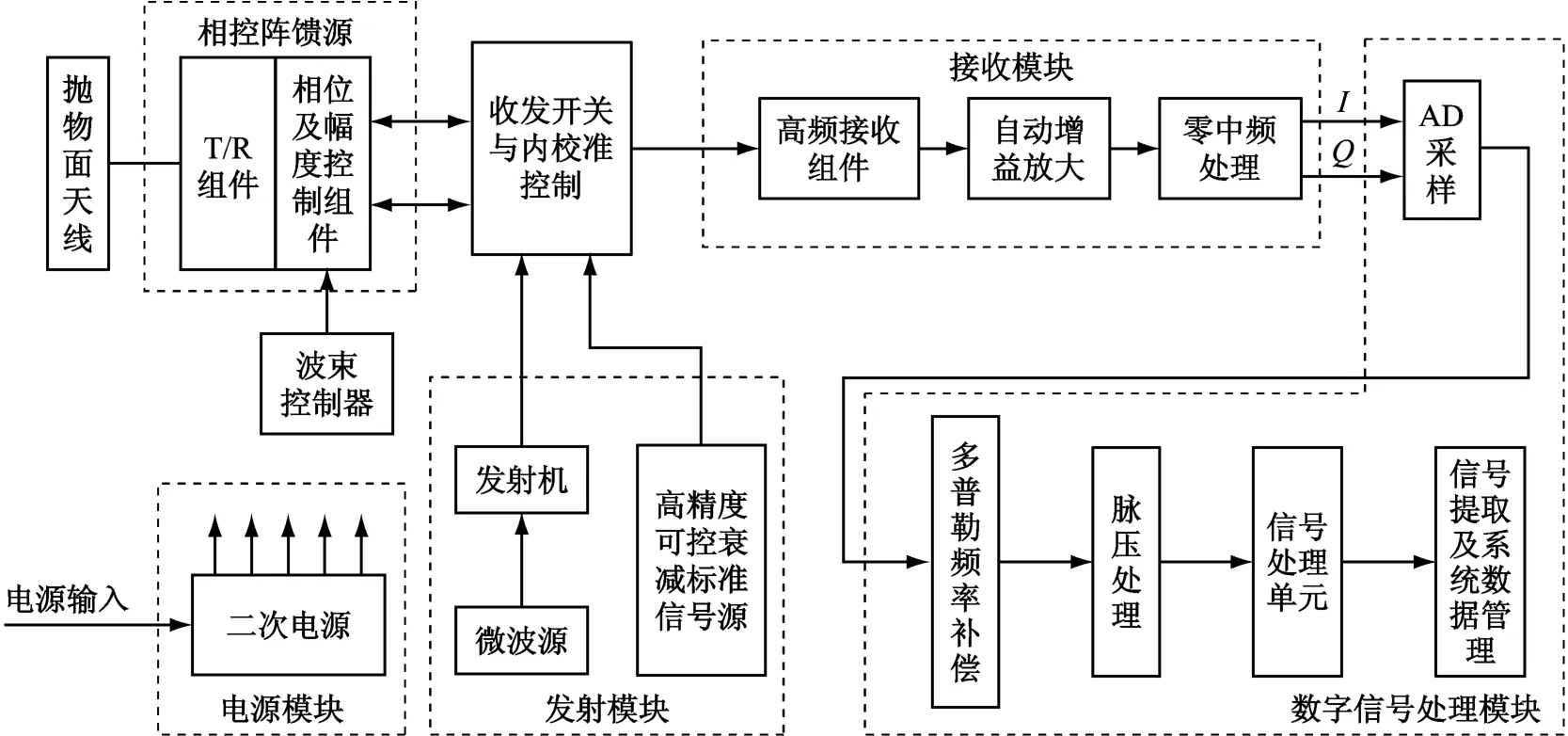
图2 星载微波海洋波谱仪系统组成框图
根据波谱仪的任务要求和测试维护要求,设计了待机、自检、内标定、自主工作四种工作状态,图3为其工作状态切换示意图。
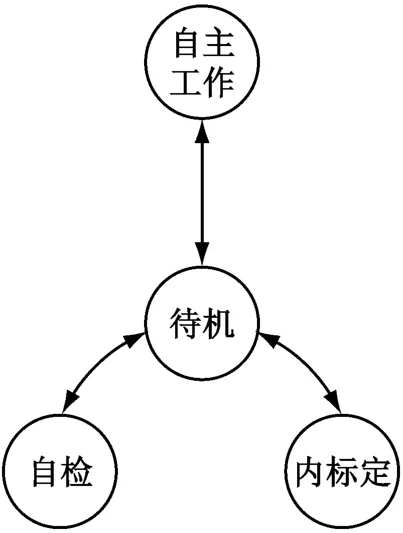
图3 工作状态切换图
相控阵馈源的波束控制器控制相位依次产生六个初级照射波束,经抛物面天线反射后形成不同入射角的波束,六个波束交替发射接收。处于自主工作状态时,工作过程:当某个波束工作时,微波源输出微波信号到垂直极化发射机放大后,通过天线辐射出去,回波信号经天线接收后,由垂直极化高频接收机接收,并到V极化中频接收机处理,最后进入数字系统进行处理,处理后的数据通过总线送到卫星平台。当其他波束工作时,工作流程类似。
2.2 处理流程
实现不同入射角波谱仪的数据处理流程如图4所示。首先,天线接收的信号经过高频接收机处理后变成中频信号,中频信号经过自动增益调整后经A/D采样变为数字信号进入数字信号处理机,进行多普勒补偿后做脉压处理,将计算得到
的功率谱序列和后向散射截面数据、波束扫描相关信息等数据经过打包下传到卫星平台。最后由卫星数据管理中心把波谱仪测量的数据及卫星角度、速度、系统标定误差等信息打包下传到地面。地面通过海浪方向谱反演算法和波向解模糊算法处理后得到最终的海浪二维方向谱密度,进而计算波浪其他参数信息。
2.3 天线与波束扫描
实现不同入射角波束时分工作并完成360°圆锥扫描有两种方式:实孔径机械扫描方式和相控阵数字波束扫描方式。
前者利用一维扫描驱动装置与馈源阵列实现不同入射角波束指向,并控制每个波束进行圆锥扫描,驱动机构的参与导致这种方式可靠性低、体积大、重量大,且波束在一次数据采集时间内存在距离徙动。
本文提出的波谱仪系统采用后一种方式,取消伺服机构,以电子扫描代替机械扫描,以数字式稳定平台代替模拟式平台,利用相控阵作为馈源实现波束指向切换,完成多个不同入射角波束指向和360°圆锥扫描。
此方式具有以下优点:
a)有效避免了天线或馈源转动对卫星平台的扰动影响,可靠性高;
b)简化了馈源设计,不必采用多个馈源实现多入射角;
c)有效去除了方位向徙动的影响。
天线系统由相控阵馈源和抛物面反射天线组成,图5为偏焦馈电抛物面反射天线和阵列馈源示意图。
相控阵馈源产生不同入射角初级照射波束,经反射器反射后,形成独立、可变的高增益波束。采用这种偏置结构的反射面天线设计不仅避免了反射面对馈源的反作用,也避免了馈源对反射面的遮挡,有利于提高天线增益和降低旁瓣水平[7]。
星载微波海洋波谱仪采用笔形波束圆锥扫描,图6为其观测示意图。随着卫星平台的向前运动,除一条0°入射角波束外,五条非星下点波束(入射角分别为 2°、4°、6°、8°、10°)进行 360°圆锥扫描,波谱仪足迹在地面形成图7所示的观测条带。其中,卫星高度为500 km,扫描速度为6 r/min。天线3 dB带宽为2°,六条波束之间的间隔也为2°,因此,波谱仪的测量波束可以覆盖约80 km×80 km范围的整个区域。假设波束在圆锥扫描时扫描间隔为8°,则通过理论计算可得波向测量精度为15°,波长测量精度为10%~20%,最小可探测波长为50 m。
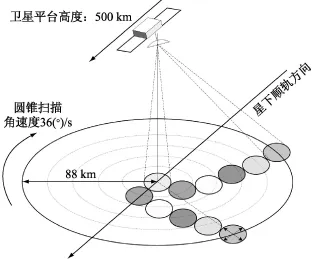
图6 波谱仪观测示意图
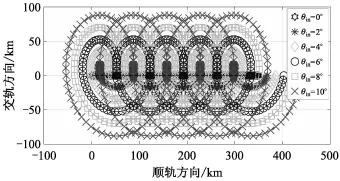
图7 波谱仪波束扫描形成的足迹
3 海浪方向谱反演算法及仿真结果
3.1 反演算法
在准镜面假设条件下,海面归一化后向散射系数可表示为[8]

式中:ρ为菲涅耳系数;θ为入射角;p(tanθ,0)为视线平面上垂直于观测方向的海面斜率概率密度分布函数。
后向散射系数 σ(σ=σ0 S)的相对变化为[9]

S为对应一个独立雷达距离单元的表面元。式(2)右边的每一项可用观测方向波陡ζx1(x,y)的形式表示,因此有

其中:
在天线足迹内,波谱仪在方位向作积分,在距离向采用脉冲分辨体制。由于方位向的足迹宽度大于对应方向的表面相关长度,在方位向做积分的结果使所有传播方向与波束在海面投影方向不一致的长波所产生的调制效应趋向于零,在距离向则形成一个受长波调制的测量序列。
图8为海面调制示意图,在图8的观测角度下(方位向为φ),可测得沿波束在海面投影方向(x1方向)传播的海浪信息,即此时信号调制m x1是x1的函数,通过360°旋转扫描可获得每个方向的海浪信息。
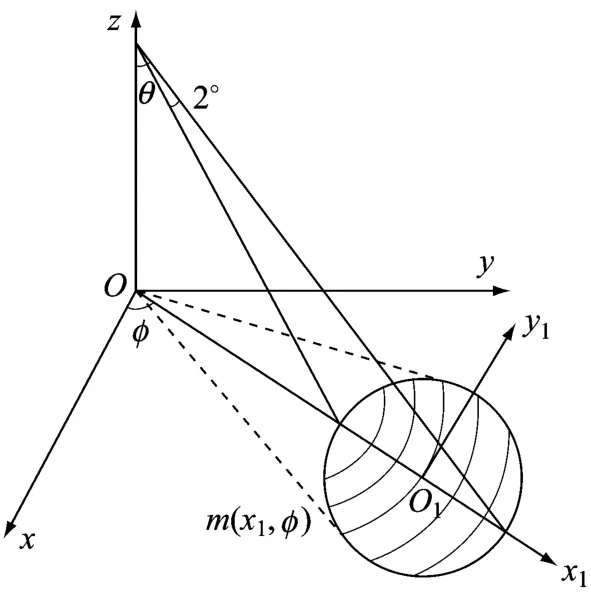
图8 海面调制示意图
定义后向散射回波在某个给定观测方向φ和每个水平雷达单元的的信号调制函数 m
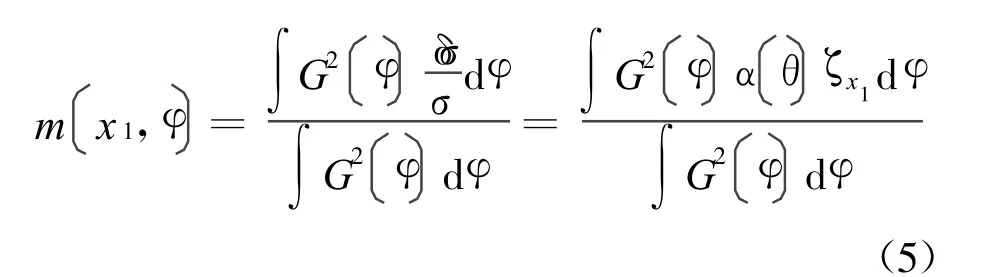
假设天线增益函数可用高斯函数近似,而雷达足迹的方位向宽度L y远大于对应方向表面相关长度,显然,调制谱和波陡谱k2F之间为线性关系:

这样,式(6)建立了波谱仪测量的调制谱Pm和海面波陡谱k2之间的关系,并且两者之间为线性关系,这是波谱仪在测浪方面的一大优势。
3.2 海浪方向谱反演仿真结果
通过对波谱仪海浪谱测量的仿真和反演可以验证算法和仿真模型的灵敏度。图9给出了具体仿真与验证流程,分为正演和反演两部分。
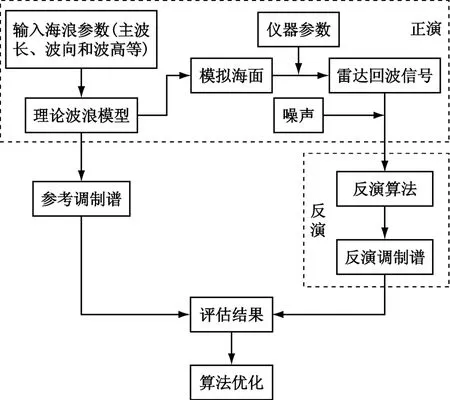
图9 算法仿真与验证流程图
正演包含海浪表面仿真、观测几何条件参数、采样点积分的雷达信号、斑点噪声和热噪声等。通过比较参考调制谱与反演计算得出的调制谱对反演算法进行验证,并对其改进和优化。
下面给出波束入射角为6°时方向谱反演算法的初步仿真结果。通过理论P-M风浪模型的波浪谱F k,φ得到波陡谱k2F k,φ[5],图 10所示为波长200m、波向45°的海面波陡谱。
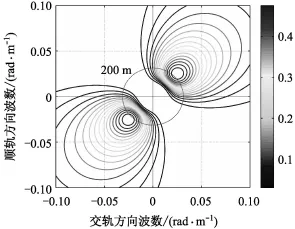
图10 海浪波陡谱
图11为其对应的大小约为17.5 km×17.5 km的模拟海面,通过得到的模拟海面结合波谱仪的系统参数,同时添加噪声,计算波谱仪接收的能量,经过反演算法得到了图12所示的估计信号调制谱。虽然谱峰处调制谱的估计值和真实值有一定差值,但两条曲线的相关性较高。本例在反演中未考虑去除噪声引起的误差影响,但由结果可以看出,算法能够较为准确地反演出海浪谱。噪声的影响以及波向解模糊算法将是下一步的研究重点。
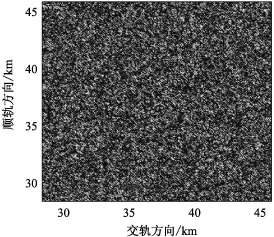
图11 模拟海面
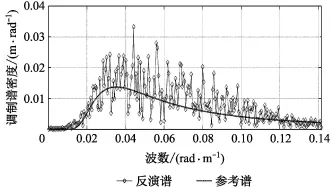
图12 反演调制谱结果
4 结束语
本文提出了一种利用相控阵馈源来实现不同入射角波束的星载微波海洋波谱仪系统,可实现对海浪方向谱的探测及海浪参数的估算。仿真结果表明,该微波海洋波谱仪系统在海洋微波遥感领域具有一定的实用价值和应用前景。
[1] 孙建.SAR影像的海浪信息反演[D].北京:中国海洋大学,2005.
[2] 杨乐.卫星雷达高度计在中国近海及高海况下遥感反演算法研究[D].南京:南京理工大学,2009.
[3] B.Chapron,D.Vandemark,et al.Airborne Measurements of the Ocean's Ku-band Radar Cross-Section at Low Incidence Angles,A tmosphere-Ocean,1994,32(1):179-193.
[4] D.Hauser,C.Caudal,et al.RESSAC—A New Airborne FM/CW Radar OceanW ave Spectrometer[J].IEEE T rans.on Geoscience and Remote Sensing,1992,30(5):981-995.
[5] D.H auser,E.Soussi,et al.SW IMSAT:A Real-Aperture Radar to Measure Directional Spectra of Ocean Waves from Space-Main Characteristics and Performance Simulation[J].Journal of A tmospheric and Oceanic Technology,2001,18:421-437.
[6] V.Enjolras,E.Caubet,et al.SW IM,a Multi-incidence Beam s Ku-band Real Aperture Radar for the Observation of the Ocean Wave Field Spectra[M].Boston,USA,IGARSS'08 Proc.2008:236-239.
[7] 寇艳玲.星载反射器天线用相控阵馈源的电气设计与制作[J].空间电子技术,2000,(4):52-58.
[8] G.R.Valenzuela.Theories for the Interaction of Electromagnetic and Oceanic W aves-A review[J].Bound.-Layer Meteor,1978,(13):61-85.
[9] F.C.Jackson,W.T.W alton,eta l.A Com parison of in Situ and A irborne Radar Observations of OceanW ave Directionality[J].Journalof Geophysical Res.,1985,90(C1):1005-1018.
