串音消除重放系统对头部偏离理想听音位置的重放性能分析-针对不同扬声器张角
2011-09-20陈小平
陈小平
(中国传媒大学录音系,北京100024)
1 引言
随着计算机和信号处理技术的发展,双耳技术(binaural technology)近年来重新成为研究热点,它在录音、厅堂音质听觉化和虚拟声环境等方面有着广泛的应用前景[1][2][3]。但是,它还存在一些需要解决的难题,其中一个主要问题是HRTFs(Head Related Transfer Functions,头部相关函数)的个人差异带来的信号处理难题。此外,双耳信号一般较适合于耳机重放,如果用扬声器重放,则需要插入串音消除滤波器,将双耳信号经过串音消除滤波器处理后,再由扬声器重放。这种扬声器重放双耳信号的系统,称为串音消除系统。由于串音消除滤波器是根据声场环境、扬声器的传输特性和扬声器相对于听音者的方位角对应的HRTFs设计的,因此只有在特定的位置即理想听音位置才有较好的重放效果。
为了解决听音位置受限问题,O.Kirkeby等人提出了“声偶极子”的概念[4][5]。所谓“声偶极子”是指两只重放扬声器非常近距离地放置或使重放扬声器的张角非常小。O.Kirkeby等人通过理论分析计算指出,张角较小的系统与普通60°张角的系统相比,其在头部偏离理想位置时能保持较好的重放效果。为了便于阐述,通常把重放系统在头部偏离理想或设计听音点时能保持较好的重放效果的特性,称为系统的稳定性。但是上述工作只选择了张角为10°、20°和60°三种情况,并只针对几个特定频率或总体效果进行分析。OrdunaF.等人[6]也对不同扬声器张角的系统稳定性及其与频率的关系进行了研究,指出当张角为10°时在工作频率高于2kHz的频率范围系统具有较好的稳定性。本文从串音消除系统的工作原理出发,定义了评估系统性能稳定性的误差参数,通过对误差参数的计算和结果分析,得到不同张角重放系统稳定性的更详细的客观评价结果。希望这些结果对采用水平方向排列各频带扬声器单元的音箱设计方案[7]提供一定的理论依据,对串音消除滤波器的设计及其实时数据更新技术、利用子带进行有限带宽的滤波器设计等[8][9][10]提供一定的参考价值。
2 研究方法
2.1 误差参数的定义
在设计串音消除系统时,通常采用传统双声道立体声重放设置,即听音者或头部位于两只重放扬声器的中心对称轴上,且头部和两只扬声器在同一水平面上,如图1所示。其中XL、XR为双耳信号;YL、YR为经过串音消除滤波器处理后馈给扬声器的信号,A、B为与左扬声器方向对应的一对HRTFs;当假设头部左右完全对称时,右扬声器方向对应的一对HRTFs则为B、A;ZL、ZR为耳鼓处接收到的声压信号。串音消除滤波器的设计方法以及存在的问题在文献上已有详细介绍[11]。这里为了得到主要问题的分析结果,忽略了扬声器的传输特性以及重放环境声学特性的影响,即假设扬声器的传输特性是理想的,且重放环境是无反射的。则当头部处于理想听音位置时,由于两只扬声器到头部中心的距离相等,因此忽略声音从扬声器传输到头部的延时,听音者双耳接收的声压信号为
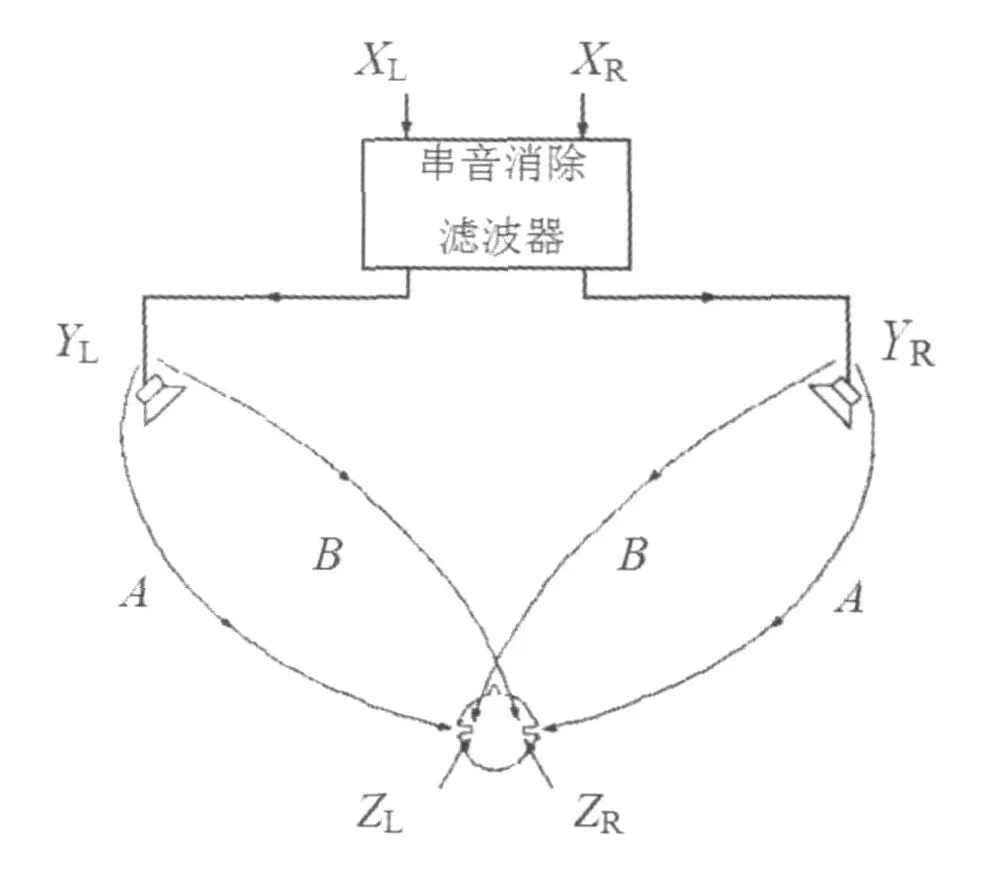
图1 串音消除重放系统

其中,k为常数,单位是Pa/V。此时双耳接收到的应是所需的双耳信号。
当头部偏离理想听音位置时,听音者双耳接收的声压信号变为

其中,AL、BR为新的左扬声器方位角对应的一对HRTFs,BL、AR为新的右扬声器方位角对应的一对HRTFs,τ1、τ2分别为声音从左右扬声器到达新的头部位置产生的附加延迟时间。
为了保持良好的串音消除效果,假设

但是,双耳信号分别被 Q1和 Q2染色,因此,为了保持好的重放效果,必须使Q1和Q2尽量一致,即

因此,用于客观评估串音消除系统稳定性的误差参数可由式(3)和式(5)得到,定义为

其中,EL、ER和EQ代表幅频特性的误差,ELP、ERP和EQP代表相频特性的误差,△t对应的相位差将叠加在ELP、ERP和EQP上。系统对偏离理想听音位置的性能稳定性由上述参数共同来评估。
2.2 误差参数的计算
误差参数的计算是针对从4°到60°的15个不同张角的串音消除系统进行的,并利用2°高方向分辨率的HRTFs进行计算。设张角为60°时两只扬声器间距为2m,则听音点到扬声器底线的距离为1.732m。然后以每步长4°改变两只扬声器的张角,同时保持听音点到扬声器底线的距离为1.732m,如图2所示。x为半底线长度,60°张角时x为1m,随着张角逐渐变小,x值也随之变小。计算时将头部偏离理想听音位置的情况分为三种,即向正左侧移动0.5m、向正前方移动0.5m和向正后方移动0.5m。在对各种情况进行计算时,以左右扬声器相对听音者的方位角每偏离2°确定一个新的听音位置,这样每种情况可以确定若干个新的听音位置。为了便于利用2°分辨率的HRTFs进行计算,过理想听音点和两只扬声器做一个圆,并假设头部沿着圆的轨迹向左侧偏移,这样左右扬声器相对于新的听音位置的方位角变化是相等的,而这种设计不会影响对系统稳定性的总体评价结果。误差参数的具体计算方法是:分别对三种情况进行计算,在每一种情况下,对每一个特定的扬声器张角,首先计算各个新的头部位置的误差参数,然后取其绝对值的平均值,作为最终评估该系统在给定情况下性能稳定性的参数。
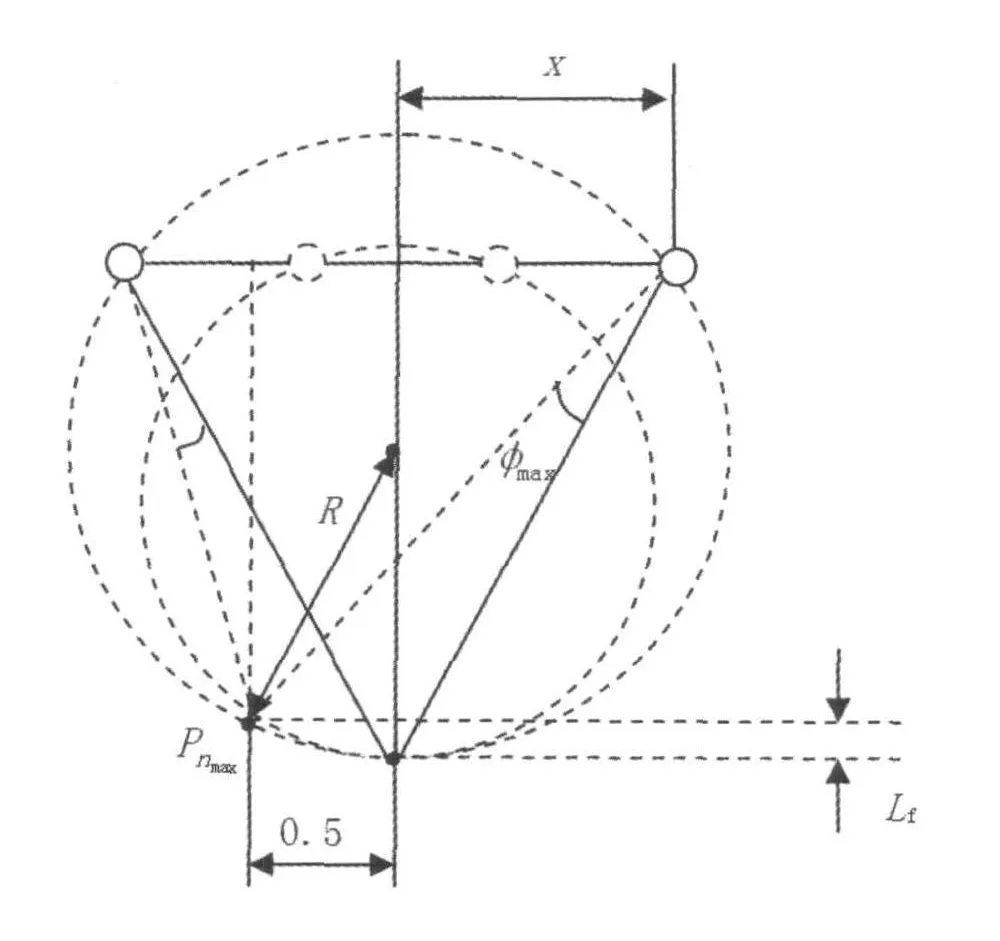
图2 误差参数计算示意图
为了完成上述评估参数的计算,首先需要根据图2进行初步计算,确定每种情况下不同扬声器张角时需要计算的新的头部位置数目。计算结果如表1所示。其中,α为扬声器张角,R为圆的半径,φmax为头部向左侧偏移0.5m时产生的最大扬声器方位角变化,n为头部向左侧偏移时需要计算的新的头部位置数目,φ1max和 φ2max分别为头部向前偏移0.5m和向后偏移0.5m时产生的最大扬声器方位角变化,n1和n2是对应的需要计算的新的头部位置数目,△tmax为最大附加时间差。
计算是根据式(6)和式(7),由MATLAB编程并导入所需的HRTFs数据完成的,计算结果用误差参数的频率特性曲线表示,如图3至图8所示。在头部向前方偏移的情况下,如果假设头部左右完全对称,则 EL等于 ER,ELP等于ERP,EQ和 EQP为零。但为了了解头部的非对称性,在头部向前方偏移的情况下,对 EL,ER,EQ,ELP,ERP和EQP都进行了计算。在头部向后方偏移的情况下,则只对EL、ELP进行计算。
2.3 容许的误差


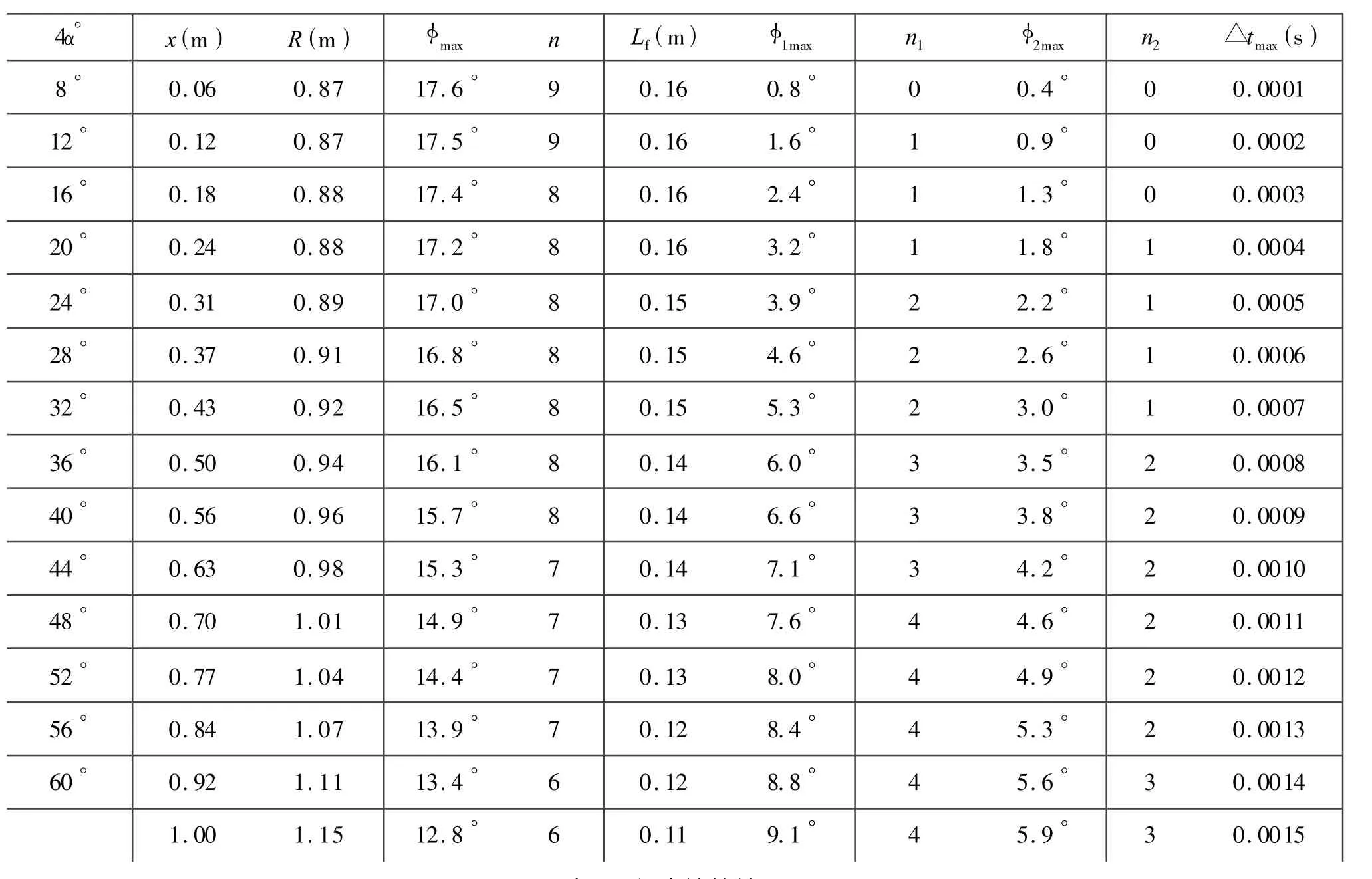
表1 初步计算结果

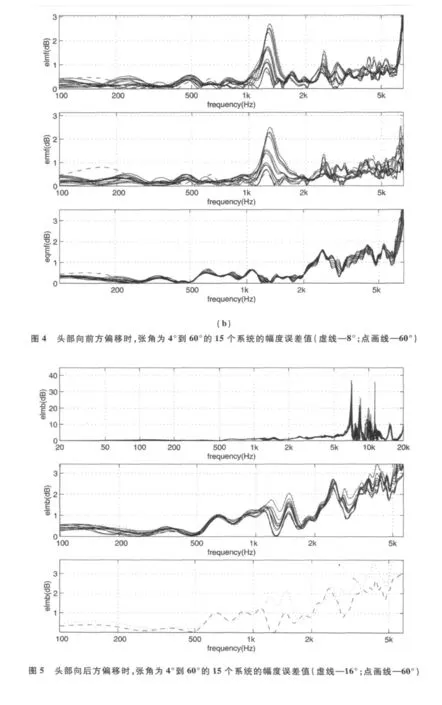
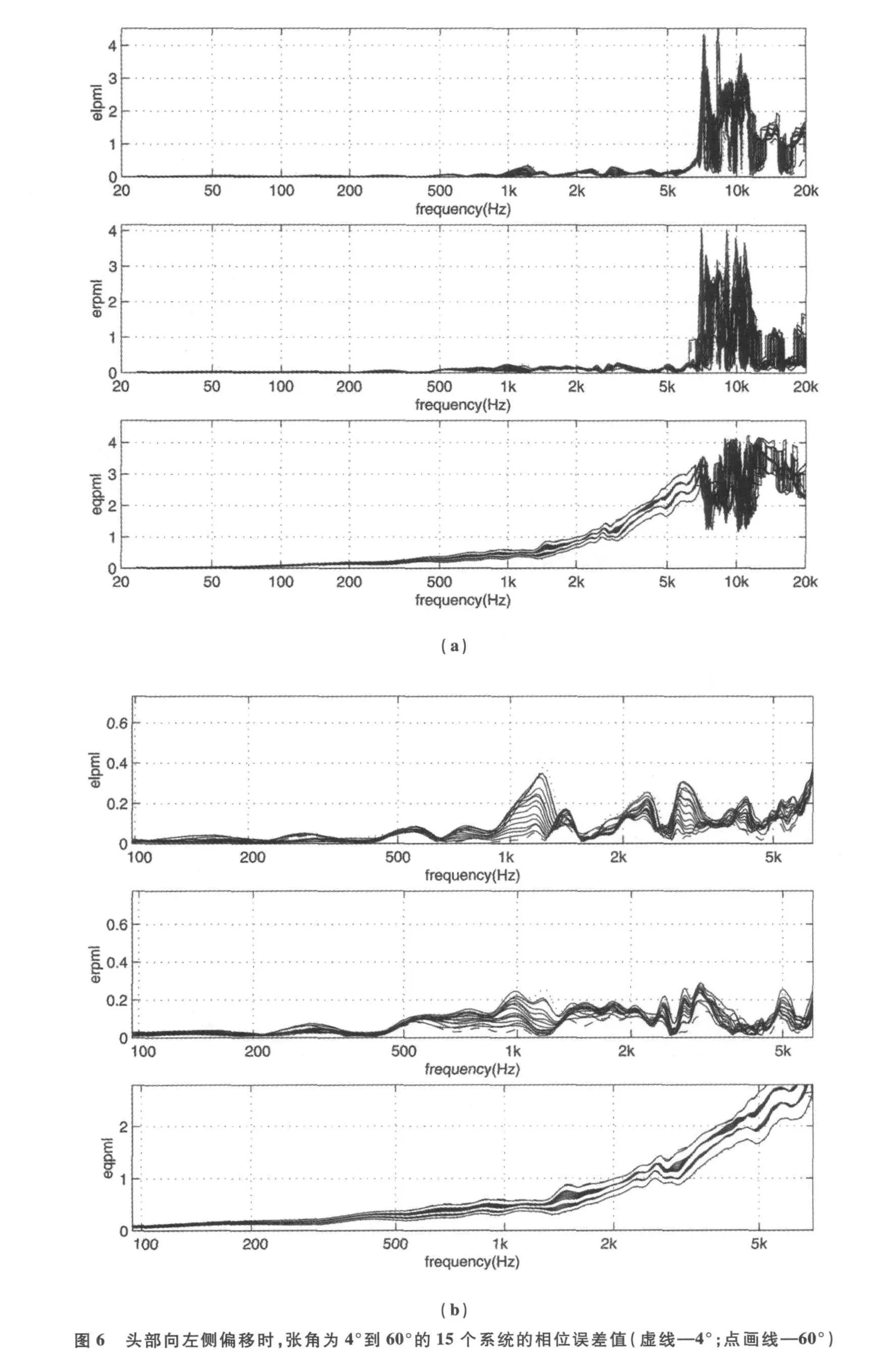
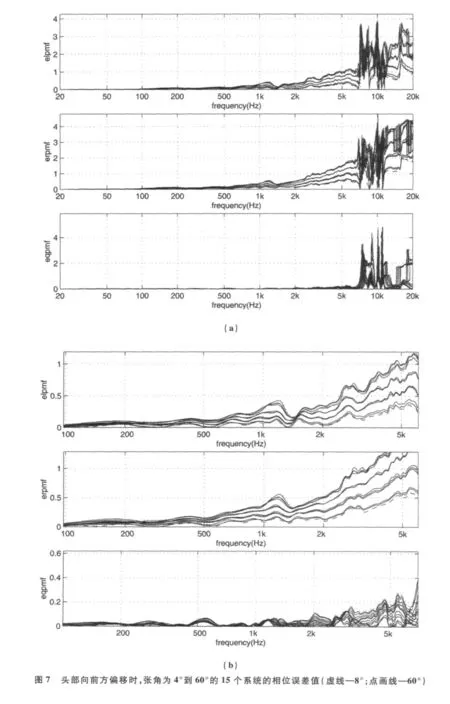
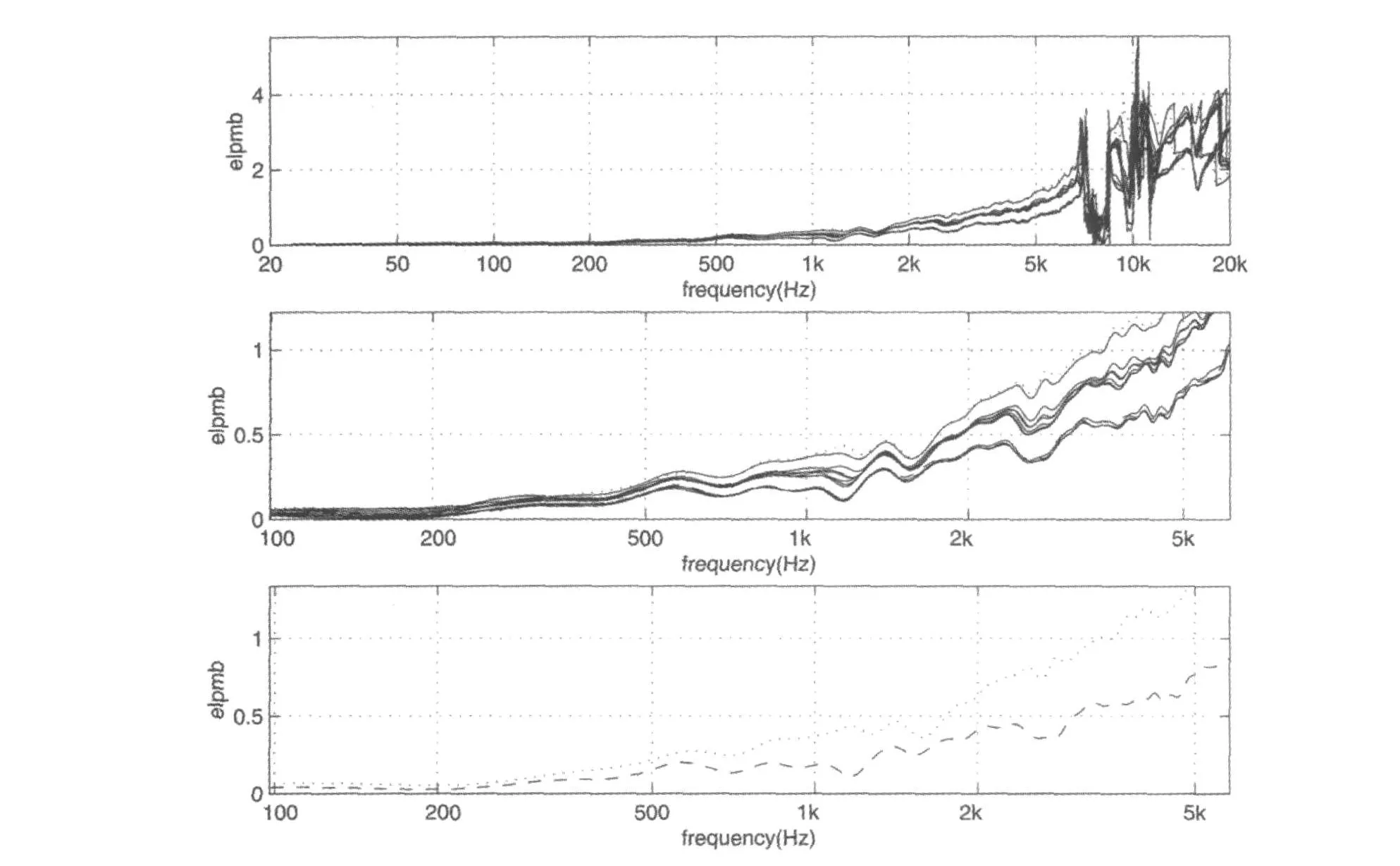
图8 头部向后方偏移情况下,张角为4°到60°的15个系统的相位误差值(虚线—16°;点画线—60°)
由式 (6)、(7)得在头部向前或向后偏移的情况下,由于头部的非对称性和可能存在的HRTFs测量误差,使得EQ和EQP的计算结果不为零。为了能更好地从计算结果评估系统的重放性能稳定性,假设保持系统良好稳定性所容许的误差值为

本文选择头部向前偏移时计算出来的EQmf和EQPmf作为评估系统在全频带重放性能稳定性的评判标准,EQmf和EQPmf如图4和图7所示。
3 结果讨论
3.1 幅度误差值
(1)头部向左侧偏移时
图3(a)所示为这种情况下15个不同张角系统的幅度误差随频率变化的特性。可见,误差值随着频率的提高呈现上升趋势;误差值在约7k Hz至12kHz的频率范围显著增大,这是由于HRTFs在该频段出现的尖蜂深谷的位置对方向非常敏感;在更高频段,由于峰谷更为密集,平均计算使得误差值中的峰谷反而消失。为了看得更清楚,图3(b)是从图3(a)中截取的约100Hz到7k Hz频率范围的计算结果。由图3(b)可知,不同张角系统的误差值在约500Hz出现较大分歧;在大约500Hz到7k Hz的频率范围内,ELml和ERml随着张角的增大而增大,而EQml却随着张角的增大而减小。
(2)头部向前方偏移时
计算结果如图4所示。当张角为4°时,由于头部向前偏移0.5m引起的扬声器方位角的变化小于2°,因此在所设定的计算精度内,其误差值取零。由图4可知,不同张角的ELmf和ERmf大约从1kHz开始产生分歧;仅在约1kHz到2kHz的频率范围内可以明显看出幅度误差值随着张角的增大而增大;EQmf对不同张角表现比较一致,这是因为EQmf主要是由HRTFs的左右非对称性产生的,而与扬声器张角大小无必然联系;EQmf在约2kHz以下的频率范围保持小于0.7dB,从约2kHz开始误差值明显增大,但在约7kHz以下仍保持小于2dB,而在大于7kHz以后其值显著增大。可见,在高于约2kHz时,HRTFs开始对方向、头部的非对称性以及个人差异非常敏感。由于EQmf在7kHz以内小于2dB,由此得到该频段容许的幅度误差值约为2dB。
(3)头部向后方偏移时
计算结果如图5所示。在这种情况下只计算了 ELmb,因为显然 ERmb与 ELmb相似,且 EQmb与 EQmf相似,都产生于HRTFs的非对称性。当系统的张角小于16°时,由于在所限定的偏移范围内扬声器方位角的变化小于2°,因此其误差值取零。由图5可知,不同张角的误差值从约1kHz开始产生分歧,并且较小的张角具有较小的误差值。
3.2 相位误差值
(1)头部向左侧偏移时
由△t产生的附加相位误差只有在这种情况下需要考虑。由表1可知,较小的张角对应较小的△tmax,这意味着产生较小的附加相位误差。
其他相位误差值的计算结果如图6所示。由图可知,相位误差值随着频率的增大而增大,尤其当频率大于约7kHz时,误差值显著增大;ELPml和ERPml在约500Hz开始出现分歧,在约500Hz到7kHz的频率范围内,张角较小的系统呈现较小的误差值;EQPml也在约500Hz开始出现分歧,而且在500Hz到7kHz的频率范围内,张角较小的系统也呈现较小的误差值。
(2)头部向前方偏移时
相位误差的计算结果如图7所示。由图可知,误差值随着频率的增大而增大,尤其当频率大于7k Hz时,误差值显著增大;ELPmf和 ERPmf在约500Hz开始出现分歧,在约500Hz到7kHz的频率范围内,张角较小的系统呈现较小的误差值;EQPmf在2kHz以下保持小于0.1,在2kHz以后开始增大,并在2k Hz至7kHz范围内保持小于0.3。由此可得,保持良好系统重放性能稳定性的容许相位误差值约为0.3。
(3)头部向后方偏移时
这种情况下只对ELPmb进行了计算,计算结果如图8所示。ELPmb具有与ELPmf相似的与扬声器张角和工作频率的关系。比较上述三种情况,当头部向左侧偏移时,产生的相位误差值最大。
4 结论
(1)当频率低于约500Hz时,不同张角系统的幅度误差和相位误差都处在容许值之内,系统的稳定性基本上与张角无关。但是,当头部偏移中心对称轴所产生的附加相位差会使张角较大系统在该低频段的重放稳定性受到一定程度的破坏。
(2)在约7kHz以上的高频段,不论张角大小,系统很难获得良好的串音消除效果,即使头部处于理想听音位置。因为在这一频段,HRTFs对方向、头部左右非对称性和个人差异非常敏感。这一结论进一步说明,如何寻求一组有代表性或典型的HRTFs数据库是双耳技术从实验室走出、进入更广阔的应用空间的关键所在。
(3)在约500Hz至7kHz的频段,除了EQml随着系统张角的增大而减小外,其他所有的误差值都随着系统张角的减小而减小;当张角小于24°时,该频段除EQml外幅度误差值几乎可以控制在容许值之内,而EQml在张角大于8°时也可以控制在容许值之内;当张角小于16°时,在该频段的各相位误差值也可以控制在容许值之内,除了EQPml和ELPmb在高于2kHz时大大超过容许值。因此,在约 500Hz至7kHz的频段,8°-16°张角的重放系统对头部偏离理想听音位置呈现相对较好的稳定性。
(4)头部向左侧偏移情况下的计算结果同样适用于头部处在理想听音位置但轻微转动的情况,只是后者不存在由△t引起的附加相位差。
另外,本文所进行的研究工作是在丹麦Aalborg大学声学系的支持下完成的。衷心感谢该校提供了2°高方向分辨率的HRTFs测量数据,使得本项工作得以顺利完成。
[1]Henrik Møller.Fundamentals of binaural technology[J].Applied Acoustics,1992,36(3):171-218.
[2]Jens Blauert(Ed).Communication Acoustics[M].Berlin:Springer,2005.
[3]谢菠荪.听觉传输技术及其应用[J].电声技术,1997,20(12):2-8.
[4]Ole Kirkeby,Philip A.Nelson,Hareo Hamada.The‘Stereo Dipole'A Virtual Source Imaging System Using Two Closely Spaced Loudspeakers[J].J Audio Eng Soc,1998,46(5):387-395.
[5]Takeuchi T,Nelson P A,Kirkeby O,Hamada H.Robustness of the performance of the‘Stereo Dipole'To Misalignment of Head Position.Preprint 4464(17)[R].Presented at the102nd AESConvention 1997 March 22-25,Munich,Germany.
[6]Orduna F,Lopez J J,Gonzalez A.Robustness of acoustic crosstalk cancellation as a function of frequency and loudspeaker separation[R].Preprint 5219,AES 109th Convention 2000 September 22-25.Los Angeles,CA,USA.
[7]Jerry Bauck.A Simple Loudspeaker Array and Associated Crosstalk Canceller for Improved 3D Audio[J].J Audio Eng Soc,2001,49(1/2):3-13.
[8]Kirkeby O,Nelson P A,Hamada H,Orduna Bustamante F.Fast deconvolution of multichannel systems using regularization[J].IEEE Trans Speech Audio Process,1998,6:189-194.
[9]Mannerheim P,Nelson P A.Virtual sound imaging using visually adaptive loudspeakers[J].Acta Acustica/Acustica,2008,94:1024-1039.
[10]M R Bai,Lee C C.Development and implementation of crosstalk cancellation system in spatial audio reproduction based on subband filtering[J].JSound Vib,2006,290:1269-1289.
[11]Henrik Møller.Reproduction of Artificial-Head Recordings through Loudspeakers[J].J Audio Eng Soc,1989,37(1/2):30-33.
