基于变频器PID控制下负载量对动态性能的影响分析
2011-08-30刘卓鸿
刘卓鸿
山东工业职业学院,山东淄博 256414
1 变频器PID控制概述
大家知道,PID控制属于闭环控制方式,即通过目标(给定)信号与反馈信号相比较后,产生偏差,用这个偏差纠正调节控制系统控制对象的响应。变频器PID内部电路将反馈信号与目标信号不断地进行比较,并根据比较结果来实时地调整输出频率和电动机的转速。
实现PID控制功能可通过变频器的功能参数设置使 PID 功能有效或无效。 PID 功能有效时,由PID电路决定运行频率; PID功能无效时,由频率设定信号决定运行频率。 PID 开关、动作选择开关和反馈信号切换开关均由功能参数的设置决定其工作状态。要实现闭环的 PID 控制功能,首先应将 PID 功能预置为有效,然后通过变频器的功能参数码预置,例如富士5000G11S /P11S系列变频器,将参数 H20 设为 0时,则无 PID 功能;设为 1 时为 PID正动作控制;设为 2 时为PID 反动作控制。
2 变频器PID控制系统动态性能的实验研究
1)主要实验设备:FRN2.2G11S-4CX变频器一台;三相异步电动机Y100L-4 功率2.2kW 带转速反馈;直流发电机Z2-32 2.2kW 220V 1500r/min;
2)实验接线图如图1示。

图1 富士变频器动态性能实验接线图
(1)电动机的速度反馈“+”端和“-”端分别接变频器的“12”和“11”端子;
(2)将“X1”与“CM”短接,即使PID控制无效;
(3)通过面板设定频率(如:20Hz),按FWD键起动变频器,用表测量速度反馈“+”端和“-”端极性是否正确,不正确则首先停止变频器,再改变电动机相序;
(4)将“X1”与“CM”断开,即PID控制有效。
3)富士变频器PID参数设置
按PRG键进入菜单画面,选“1 数据设定”,并按表1参数设置。

功能代码 名称 设定数据F01 频率设定1 0 F02 运行频率 0

表1 PID控制参数设定
3 PID控制参数调试
PID控制调试过程是通过观察系统的响应曲线,然后根据P、I、D参数对系统的影响,调试PID参数,直至出现满意的响应。即超调量小、起动时间短、振荡次数少。从而确定 PID控制参数。整定步骤: 为“先比例,再积分,最后微分”。
3.1 整定比例部分
比例增益 P 越大,调节灵敏度越高,但由于系统和控制电路都有惯性,调节结果达到最佳值时不能立即停止,导致“超调”,然后反过来调整,再次超调,形成振荡。将比例控制作用由小变到大,观察各次响应,直至得到反应快、超调小的响应曲线。
3.2 整定积分环节
若在比例控制下稳态误差不能满足要求,需加入积分控制。引入积分环节I,其效果是使经过比例增益P放大后的差值信号在积分时间内逐渐增大(或减小),从而减缓其变化速度,防止振荡。但积分时间 I 太长,又会当反馈信号急剧变化时,被控物理量难以迅速恢复。因此,I的取值与拖动系统的时间常数有关:拖动系统的时间常数较小时,积分时间应短些;拖动系统的时间常数较大时,积分时间应长些。
先将步骤(1)中选择的比例系数减小为原来的50%~80%,再将积分时间置一个较大值,观测响应曲线。然后减小积分时间,加大积分作用,并相应调整比例系数,反复调试至得到较满意的响应,确定比例和积分的参数。
3.3 整定微分环节
经过步骤(2),PI 控制只能消除稳态误差,若动态过程不能令人满意,则应加入微分控制,构成PID 控制。先置微分时间等于0,然后逐渐加大,同时相应地改变比例系数和积分时间,3个参数反复调试至获得满意的控制效果和PID 控制参数。
4 不同负载量的动态性能的分析
1)用面板设定PID命令值为20。
按FWD键起动变频器,观察变频器的起动过程。主要包括:超调量、起动时间、振荡次数;面板PID反馈量,稳态转速等。按STOP键停止变频器。
用示波器测量阶跃输入下转速的时间响应,观察并记录响应曲线。
2)用面板设定PID命令值为40,重复上一步。
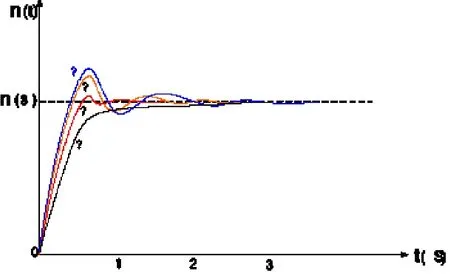
图2 变频器动态响应曲线图
在图2中可看到负载量对动态性能的影响;实验数据见表2。
从图表中看出随负载的增加其超调量越来越小,振荡次数越来越小。因此,PID参数整定时应充分考虑到负载的影响,根据负载大小调整参数,使负载的影响降到最低。
PID最佳整定参数确定后,并不能说明它永远都是最佳的,当外界扰动发生根本性的改变时,就必须重新根据需要再进行最佳参数的整定,这样才能充分体现PID控制优点。
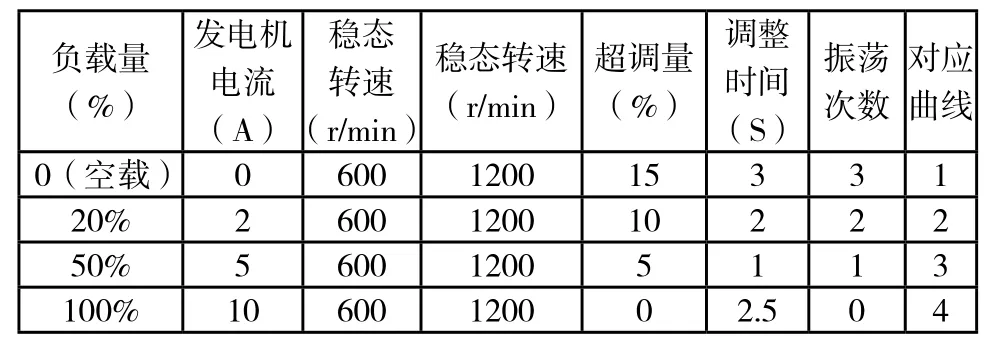
表2 负载量对动态性能的影响(PID命令值分别为20和40)
5 结论
变频器PID控制系统的参数必须根据实际工程具体要求来考虑。在工业过程控制中,首先要保证闭环系统稳定,然后对给定(目标)量的变化能迅速跟踪,超调量小。在不同干扰下或负载量变化时输出应能保持在给定值附近,控制量变化应尽可能的小。在系统和环境参数发生变化时控制应保持稳定。一般来说,要同时满足这些要求是很难做到的,必须根据系统的具体情况,满足主要的性能指标,同时兼顾其它方面的要求。
[1]陈伯时.电力拖动自动控制系统[M].3版.北京:机械工业出版社,2003.
[2]王树.变频调速系统与应用[M].机械工业出版社,2005,3.
[3]王建,徐洪亮.富士变频器入门与典型应用[M].北京:中国电力出版社,2008.
[4]FRENIC 5000G11S/P11S 操作说明书 富士电机机器制御株式会社.
