模糊控制技术与神经网络法相结合实现光伏发电系统最大功率点跟踪
2011-07-10黄克亚
郑 蕾,黄克亚
(南京铁道职业技术学院,苏州 215137)
0 引言
模糊控制是一种仿人思维的控制技术,它不依赖于被控过程的数学模型。但是它需要利用专家的先验知识进行近似推理,缺乏在线自习或是自调整的能力。因此自动生成、调整隶属函数或是调整模糊控制规则,往往成为进行模糊控制的难题。
神经网络对环境的变化有极强的自习能力,在建模方面具有黑箱学习模式特点。然而在学习完成后,从输入、输出数据得出的关系却无法用人们易于接受的方式表示出来。如果能将模糊理论表达知识能力和神经网络的自学能力结合起来,提高整个系统对知识的学习和表达能力,无疑会受到控制工程界的极大欢迎[1]。
论文尝试利用Matlab神经网络工具箱,由实测数据自动产生模糊控制规则,并将其嵌入到光伏系统MPPT模糊控制过程当中。
1 光伏阵列MPPT原理
光伏组件的输出存在着功率最大点,在特定的温度和光照条件下,组件能否工作在最大功率点取决于组件所带的负载大小,图1是用图解法得出光伏组件的工作点的示意图。其中a图是光伏组件工作时的等效电路图,b图中曲线为太阳能光伏组件输出的电流电压(I-V)曲线,直线表示负载
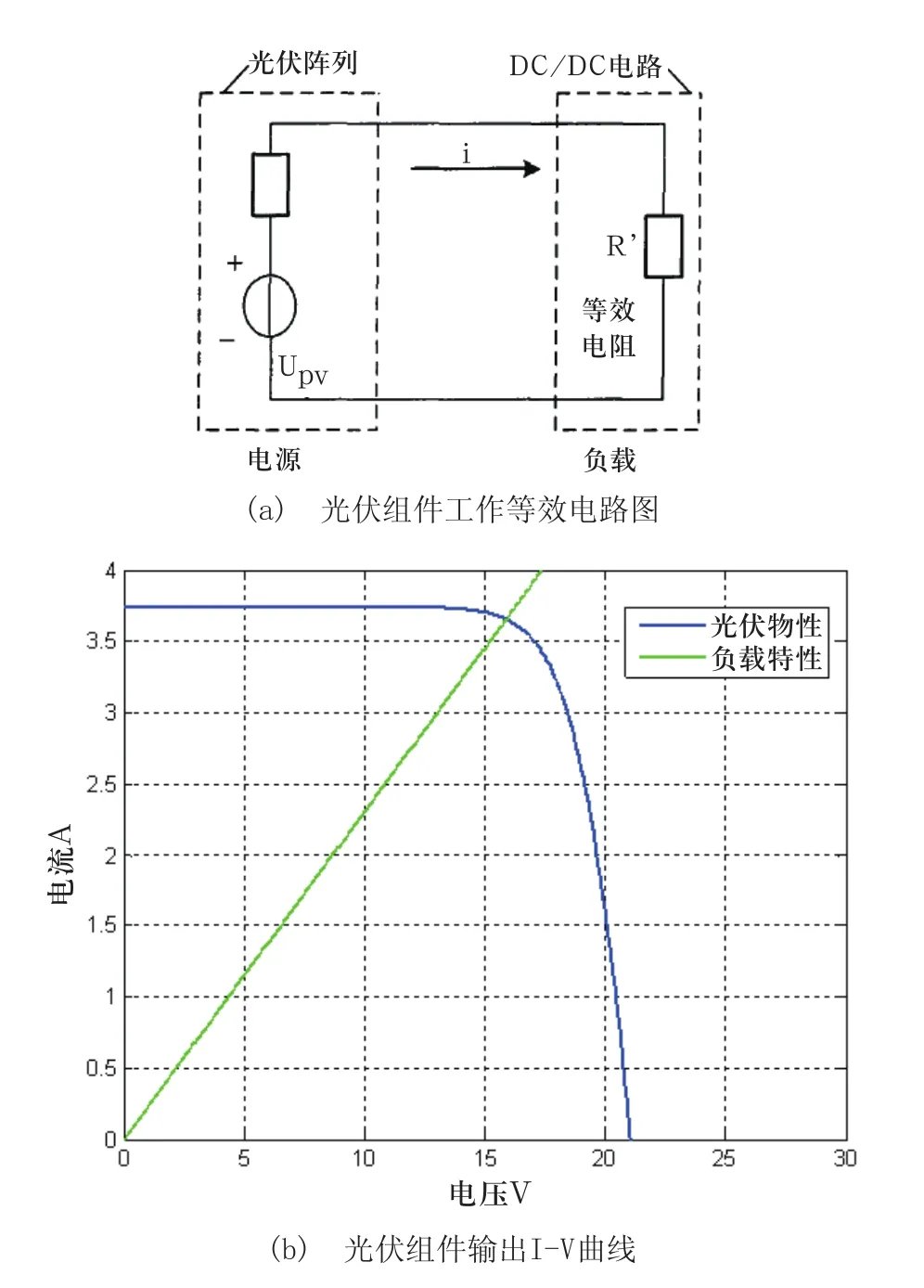
图1 光伏阵列等效电路及I-V曲线
电阻的I-V特性,二者的交点即为光伏组件的工作点,工作点的电压电流既要符合光伏组件的I-V特性又符合负载自身的I-V特性。如果两条线的交点不在最大功率点,此时负载和光伏组件就处于失配状态,光伏组件所产生的电能就没有被充分利用。
外界的环境因素,通常是无法人为改变的,温度和光照在一天中是变化的,方阵的输出特性也随之变化,要使光伏方阵始终能够输出最大功率,必须适变其所接的负载。论文选择Boost电路作为系统DC-DC变换电路,实现负载等效电阻的改变,其电路结构如图2所示。
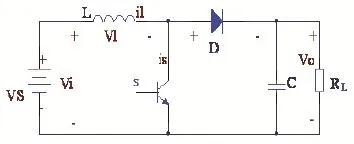
图2 升压式变换器电路图
推导得出Boost电路阻抗变换关系[2]如式(1)所示。
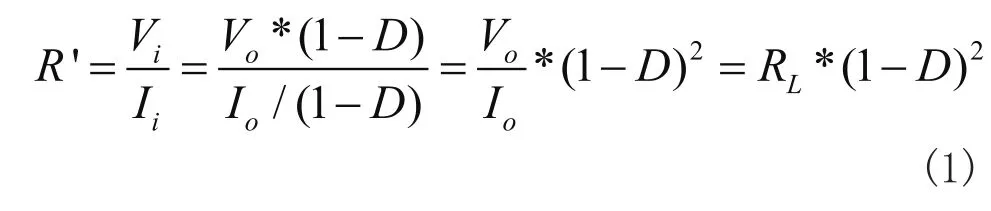
其中:R’:BOOST电路等效输人阻抗,D:开关占空比,RL:负载阻抗。式中不考虑BOOST电路电感的自身电阻。
由此可知光伏方阵所接的等效负载是DC-DC变换器占空比D和其所带负载的函数,调节变换器的占空比就可以达到改变光伏方阵等效负载的目的,使之在不同的外部环境下始终跟随光伏阵列的内阻变化,两者动态负载匹配时就可以获得光伏阵列组件的最大输出功率,从而实现最大功率跟踪。
2 光伏系统MPPT模糊控制算法
光伏系统是一个强非线性系统,太阳能电池的工作情况也很难以用精确的数学模型描述出来,因此采用模糊控制的方法来进行光伏系统最大功率点跟踪是非常合适的。
2.1 输入和输出变量的确立
基于扰动观察法的原理,根据功率值的变化量和前一时刻的占空比调整步长,来决定这一时刻的占空比调整步长[3]。取目标函数为光伏电池的输出功率,控制量为用来控制开关管的PWM信号的占空比D。模糊自寻优控制器的第n时刻的输入量为第n时刻的功率变化量和第n-1时刻的占空比步长值,第n时刻的输出量为第n时刻的占空比步长值。图3为控制原理框图。
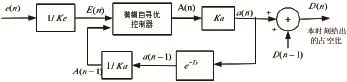
图3 光伏系统模糊控制原理图
输入:(1)e(n)表示第n时刻与第n-1时刻输出功率之差的实际值,E(n)表示这个差值对应于模糊集论域中的值。(2)a(n-1)表示第n-1时刻步长的实际值,A(n-1)表示这个步长值对应于模糊集论域中的值。
输出:a(n)表示第n时刻步长的实际值,A(n)表示这个步长值对应于模糊集论域中的值。
Ke、Ka分别为量化因子。
2.2 确定输入/输出量模糊子集及论域
将语言变量E,A 分别定义为8个和6个模糊子集,其中A(n-1)和A(n)变量子集和论域相同,统一将其命名为A。
E ={NB ,NM ,NS,NO,PO,PS,PM ,PB}
A ={NB,NM,NS,PS,PM,PB}
其中NB ,NM ,NS ,NO,PO,PS ,PM ,PB分别表示负大,负中,负小,负0,正0,正小,正中,正大模糊概念。并将它们论域规定为14个和12个等级,即:
E={-6,-5,-4,-3,-2,-1,-0,+0,+1,+2,+3,+4,+5,+6}
A={-6,-5,-4,-3,-2,-1,+1,+2,+3,+4,+5,+6}
2.3 模糊推理规则确定
模糊控制规则是模糊控制器的核心,直接影响控制的成败和效果,一般由有经验技术工人和专家经过长时间的操作、观察和积累经验总结出来。但是这种总结积累存在如下困难:1)技术人员虽能很好地操作被控系统,但未必能够用清晰的语言表述成合格的模糊规则;2)由于语言表述的控制规则具有模糊性,往往不够完整和充分,致使其他技术人员按文操作却达不到技术要求;3)如果模糊规则太多,靠人工很难总结出来。本节讨论利用Matlab神经网络工具箱,由实测数据自动产生模糊控制规则。具体实现过程分四步阐释。
2.3.1 产生实验数据
模糊控制规则产生和分析的依据是技术和专家的实测数据,可将每次操作的输入输出进行记录,形成表格输入电脑。通过实验测得模糊控制器各种条件下输入输出,并用记事本记录存储,如图4所示,其中第一列表示功率差E(n),第二列表示上次扰动步长A(n-1),第三列表示系统输出即本次扰动步长A(n)。在Matlab运行时将数据导入到工作空间去。
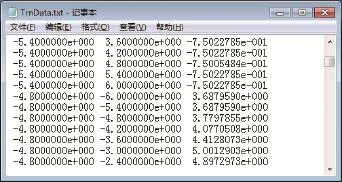
图4 实测模糊控制器输入输出数据
2.3.2 装入训练与测试数据
在Matlab主窗口,输入anfisedit,回车,打开自适应神经模糊系统编辑界面。ANFIS是把神经网络理论和T-S模糊推理结合在一起的一个系统,它可根据大量数据,通过自适应建模方法建立起模糊推理系统(FIS)。点击ANFIS编辑器界面左下方Load data区域操作按钮,依次由工作空间载入训练数据、测试数据进入编辑器。
2.3.3 生成初始FIS
在ANFIS编辑器Generate FIS编辑区,选择Grid partition(网格法)作为生成算法,并设置输入量的模糊子集分别为[6,8],隶属函数类型为高斯型,输出隶属函数为常数类型,点击生成按钮生成初FIS。此时还可更改输入输出变量的名称,以及修改模糊子集名称。生成初始FIS,只是确定系统结构,系统并没有输出,要想确定模糊控制规则,必须根据实测数据进行训练。
2.3.4 训练初始FIS
通过设置Train FIS选项卡,选择混合法(hybrid)作为训练方法,设置误差精度(Error Tolerance)为0,最大训练次数(Epochs)为60,开始进行训练。训练完成之后即已经根据实测数据生成新的模糊推理系统。
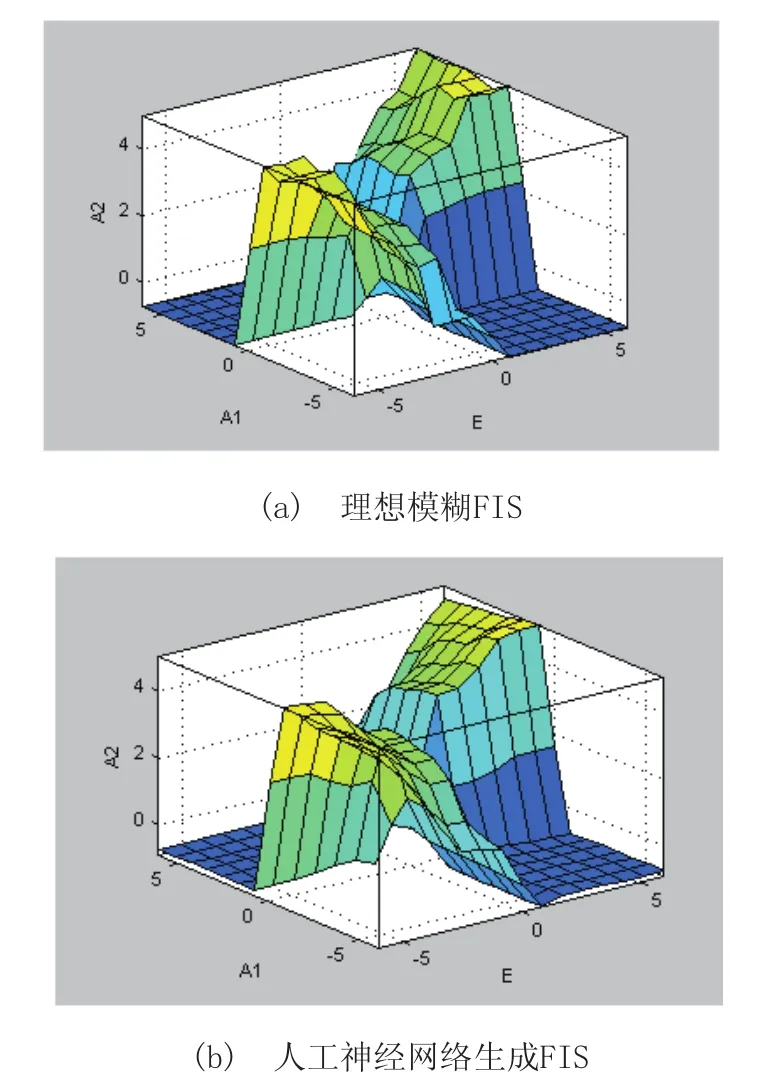
图5 人工神经网法生成FIS与理想FIS比较图
通过与模糊控制系统理想FIS(理论分析)进行比较如图5所示,发现通过人工神经网络法生成的FIS和理想FIS几乎是完全一样的,说明人工神经网络法自动生成模糊FIS方法是是简便、高效、更加客观科学的。
2.4 解模糊方法的建立
在模糊控制编辑器中,模糊决策选择成熟且容易实现的Mamdani推理算法,“交”方法为min,“并”方法为max,推理方法为min,聚类方法为max,解模糊方法[4]选择具有较高精度的重心法(centroid)。
3 模糊MPPT控制的仿真分析
利用上面的理解,在Matlab Simulink中建立如图6的仿真模型[5],模糊控制器的输入为n时刻的功率差值和n-1时刻的占空比步长值,输出为n时刻的占空比步长值。光伏电池模型、Boost电路采用嵌入函数形式来完成。需要指出的是量化因子Ke和Ka负责将功率差实际值e和步长实际值a,变换到模糊控制器输入变量的论域范围内。
设置仿真参数:仿真时间1s,仿真算法为Fixed-step Discrete,步长0.0001s,系统初始工作条件为光照强度由900W/m2,温度为15℃,并使系统在0.3s时光照强度由900W/m2变化到1000W/m2,在0.5s时温度由15℃变化-15℃。运行仿真后就可通过scope观察系统的仿真输出结果如图7所示。
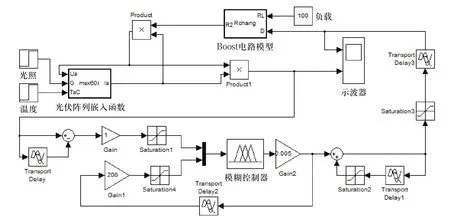
图6 模糊控制实现MPPT仿真电路图
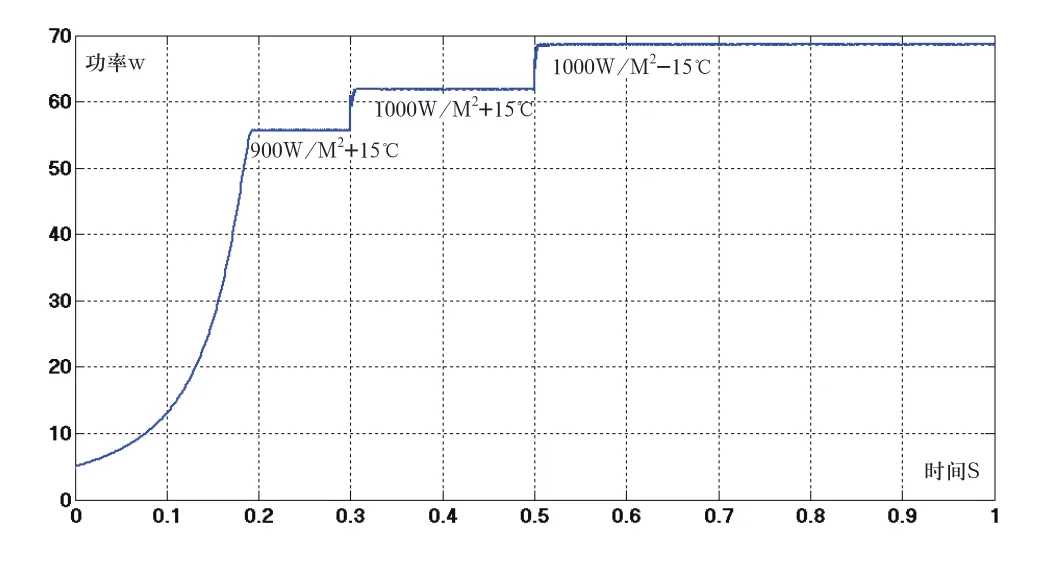
图7 模糊控制光照和温度变化时功率曲线
由图7可知,系统能够快速地跟踪到最大功率点,当系统环境发生变化时,采用模糊控制方式能够快速响应,并能稳定于新的最大功率点,没有发生误判,稳态也没有出现振荡,表现出良好的动态和稳态性能。
4 实验及结果分析
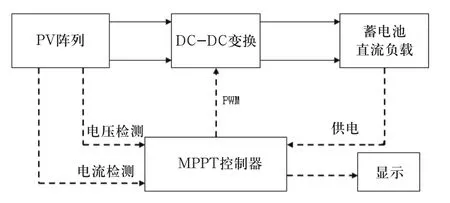
图8 MPPT控制系统总体框图
独立光伏系统主要利用光伏阵列,将太阳能转换为电能,以DC-DC变换电路,变换出合适的电压供给直流负载使用。由于太阳能电池的输出有不稳压性,为获得连续的电能,有时还要加入蓄电池模块,以使电压电流平稳。为保证整个光伏系统输出处于最大功率点,提高太阳能电池的利用率,我们还要设计MPPT控制器以使系统始终处于最大功率点。系统总体框图如图8所示。
控制系统核心由低功耗、高性能CMOS 8位微控制器AT89S55实现。光伏电池选择经典的Solarex MSx60 60W电池板,在标准测试条件下,即光强1000W/m2,温度为25℃,其基本参数:最大功率Pm=59.9W、峰值工作电流Im=3.5A、峰值工作电压Vm=17.1V、短路电流Uoc=3.74A、开路电压Isc=21.0V。程序采用单片机开发语言C51编写,虽然本论文采用了复杂的人工神经网法自动生成模糊控制规则,但这部分计算是由计算机来处理的,所以在编写控制程序时只要根据生成的规则表进行推理即可。
完成系统硬件电路设计,编写控制程序,当天气晴朗,光照较强,使太阳能电池板正面接受光照,通过示波器观察光伏阵列输出波形。图9为光照突然改变时系统输出电压、电流波形。实验表明当外界环境稳定系统能够稳定工作于最大功率点,当光强或是温度发生改变时,系统能够快速响应找到新的最大功率点并稳定运行。对比于传统的扰动观察法和电导增量法,采用模糊神经网络法光伏系统MPPT控制方法表现出更好的动态性能和稳态性能。
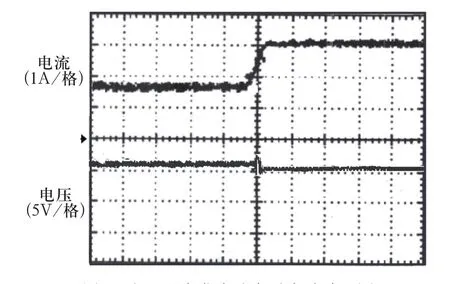
图9 光照强度发生改变时实验波形图
5 结束语
论文分析了利用Boost电路实现光伏发电系统MPPT的原理,提出控制思路。重点讨论了基于模糊控制的MPPT算法,关键技术是借助人工神经网络法,由实测数据生成模糊控制规则。仿真和实验显示采用该方法能够找到光伏发电系统最大功率点,并且当环境发生变化时能够快速响应,表现出较好的动态性能和稳态性能。
[1] 石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
[3] 乔兴宏,吴必军,邓赞高,游亚戈.模糊/PID双模控制在光伏发电MPPT中应用[J].电力自动化设备,2008,28(10):92-95.
[4] Chung-Yuen Won,Duk-Heon Kim,Sei-Chan Kim.A new maximum power point tracker of photovoltaic arrays using fuzzy controller[J].IEEE Trans Ind Electron,2004,(3):396-403.
[5] 李维波.MATLAB在电气工程中的应用[M].北京:中国电力出版社,2007.
