直驱式永磁同步风力发电机的H∞控制
2011-06-26蔡超豪
蔡超豪
(沈阳工程学院 电气工程系,辽宁 沈阳 110136)
0 引言
风力发电是开发和利用可再生能源的最好工具之一,具有广阔的市场前景。省去齿轮箱的直驱式永磁同步风力发电机,因为具有机组寿命长、维护方便、效率高等优点,将成为未来风力发电发展的主要方向。因此,该机型的技术、运行特性、并网后功率的控制也相应地成为风电领域的重要研究课题。
近几十年发展起来的H∞鲁棒控制理论是一种比较成功且完善的理论体系,可以解决干扰抑制、鲁棒稳定、信号跟踪等问题。本文研究直驱式永磁风力发电机的H∞控制,应用Mat lab工具箱进行求解。
1 直驱式永磁同步风力发电系统的组成及其使用
直驱式永磁同步风力发电系统由风轮机、多极永磁同步发电机(PMSG)、PWM整流器、直流环节、PWM逆变器和电网组成(如图1所示),为了增加系统的可靠性和降低维修费用,取消了增速齿轮箱。由于永磁材料磁性能的改善和价格的降低,可用永磁体代替同步电机的励磁绕组,省去了滑环,简化了电机结构,并且永磁发电机与传统发电机相比可以使极距减小,所以电机的转速可以设计得较低,可以在20~200r/min之间,因而永磁发电机可以直接与风轮机相连,由变浆距风轮机直接驱动,构成直驱式永磁同步风力发电系统。
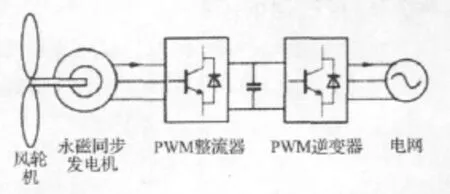
图1 直驱式永磁同步风力发电系统的组成
PWM整流器将发电机发出的交流电整流成恒定直流,并提供一个可供最大功率点追踪控制算法使用的直流信号和功率信号,实现最大功率控制;对整流器进行矢量控制,可以实现有功功率和无功功率的解耦控制。直流环节为PWM逆变器提供一个合适的直流电压,使得逆变器向电网输出一个期望的电流,以传输有功功率和无功功率。
发电机的单机容量为3~5 MW,也可以在每一台发电机机端配置整流器,通过直流母线实现与风电场其他机组(群)的并联运行,既提高了可靠性,又改进了效率。风电场由一台大容量公用逆变器把直流母线的直流电转换成50Hz的交流电,电压可以达12kV,以直接并入当地电网使用,还可以经变压器升压至更高电压后并入更高压电网传输到远处。
由于风能本身的波动性、随机性,使得并网运行的风电机群输出的有功功率也具有波动性、随机性,因此机群输出有功功率的控制目标是:在保证单台风电机组安全稳定运行的基础上,最大效率地利用风能,输出恒频恒压的电量。
由于风电机群具有一定的无功功率调节能力,所以无功优化的控制目标为:提高风电机群与接入系统的电压稳定,依据风速预测和地区系统无功优化方案,确定机群的无功输出及电压水平,以保证风电机群并网母线节点及系统关键节点的电压稳定。
本文着力研究利用H∞控制方法对有功、无功功率控制参考值的跟踪及内外部干扰的抑制,保持系统的安全运行。
2 直驱式永磁同步风力发电系统矢量控制时的数学模型
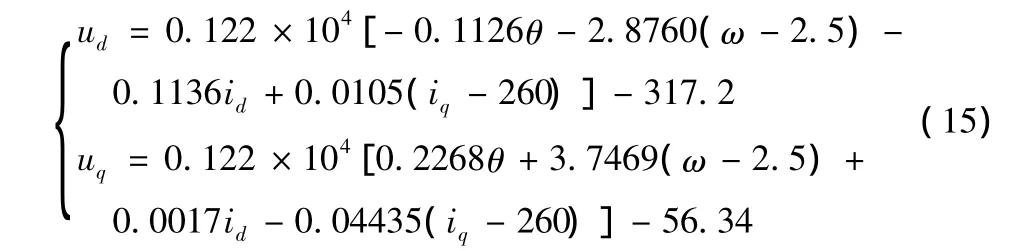
在两相同步速旋转d,q坐标系下,当采用定子磁场定向矢量控制,并将定子磁链矢量定向在d轴上,直驱式永磁同步风力发电系统矢量控制时的数学模型为[1]
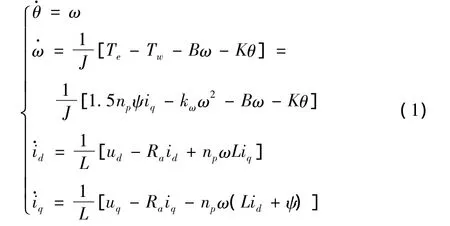
式(1)中第1、2式为风力发电机系统的转子运动方程,式中θ,ω为转轴角位移和机械角速度,TW为风能转换到轮毂上的机械转矩

式中:kω=0.5Cp(λ,β)ρπR5/λ3,ρ为空气密度,R 为风力机桨叶半径,Cp(λ,β)为风力机的风能利用系数,β为桨距角,λ=ωR/υ为叶尖速比,υ为风速。
Te是发电机的电磁转矩J,B,K分别为风力发电系统的机械转动惯量、转动粘滞系数和扭矩系数。
式(1)的第3、4式为基于d-q同步旋转坐标系的发电机电压方程,式中u,i分别表示电压和电流,下标代表d,q轴分量,设d轴和q轴电感相等,即Ld=Lq=L,Ra为定子电阻,np为发电机磁极对数,ψ为每对磁极产生的磁链。
3 直接反馈线性化
直接反馈线性化(DFL)是我国学者提出并发展起来的基于系统输入-输出描述的一种反馈线性化方法[2],可以将非线性系统在全局范围内进行线性化处理[3、4]。与基于微分几何理论的线性化方法对比,它们采用了不同的描述方式和处理方法,得到相同的线性化效果。DFL的优点是所用的数学工具简单,物理概念清晰,适合于工程应用。
对式(3)、(2)进行坐标变换:采用状态变量的偏差量为输出变量,得输出方程

式中 θref,ωref,idref,iqref为选定的参考值。将式(4)对 t求导得

将不确定参数Ra,B,K用标称值和偏差值之和表示(温度变化引起Ra的偏差,转速变化和转轴的柔性变化引起B,K的偏差)

将式(4)~(6)代入式(1),得出具有参数摄动阵ΔA(t)和有界扰动的不确定系统

式中 x=[Δθ Δω ΔipΔiq]T
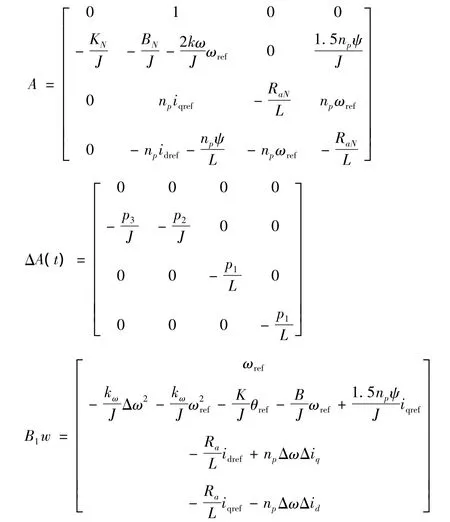
B1w包含非线性内容或不确定值,代入参数的数值后,可估计出其上界
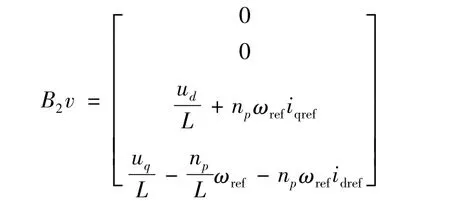
设B2v第3、4行分别等于v1,v2,它们被称为虚拟控制变量,即
于是,B2v可写成
4 H∞控制器的求解
式(7)符合参数不确定系统的H∞控制标准形式[6],第1式为被控对象,其中ΔA(t)为参数摄动阵,可描述为

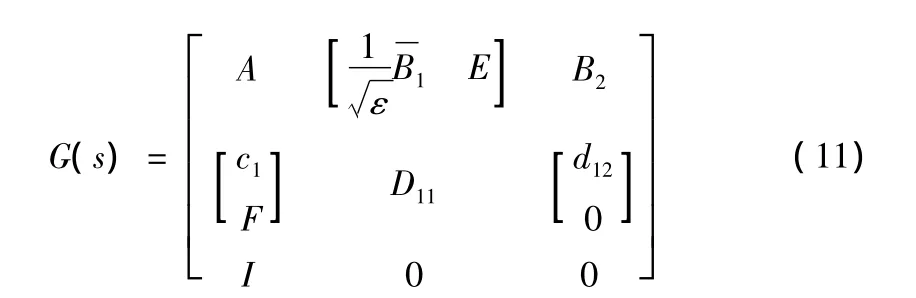
可用以求解具有鲁棒稳定、干扰抑制性能的状态反馈控制器。式(11)中ε>0,ε越小,意味着系统对干扰抑制性能越好,但过小的ε将会削弱系统的鲁棒稳定性。式中为零矩阵。
式(7)的状态反馈控制器为
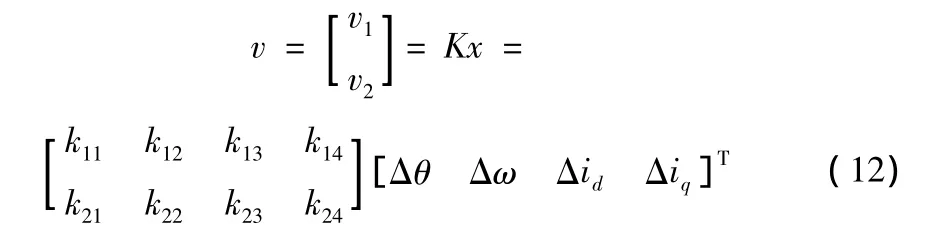
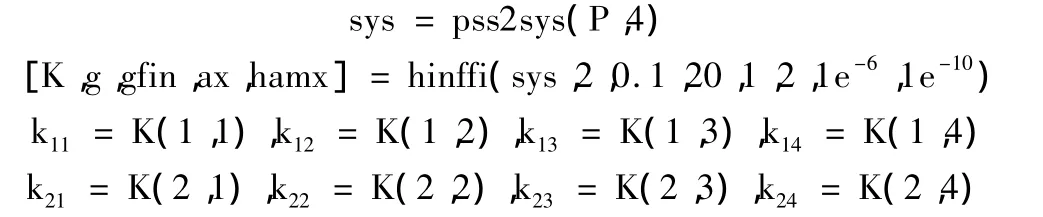
式中K为反馈系数,可以用求解Riccati不等式的方法或利用MATLAB软件中μ-分析与综合工具箱的hinffi.m函数求取[7],命令如下 P= [A,B1,B2;C1,D11,D12]
由式(8)、(12)便可得出直驱式永磁同步风力发电系统的非线性H∞控制律:

5 算例及计算机仿真
直驱式永磁同步风力发电系统的参数如下:额定功率PN=2 MW,额定电压 UN=4 kV,风机额定转数 ωg=23.87 r/min=2.5 rad/s,发电机极对数np=40,永磁体磁链 ψ=0.5634 Wb,定子电阻 RaN=0.01 Ω,定子电感 L=0.003 H。额定风速 υr=13 m/s,空气密度ρ=1.225 kg/m3,叶片半径r=42 m,等效转动惯量J=8000 kgm2,转动粘滞系数BN=3,扭矩系数KN=2。在运行过程中,不确定参数RaN,BN,KN变化可达其标称值±50℅。试设计H∞控制器并进行计算机数字仿真。
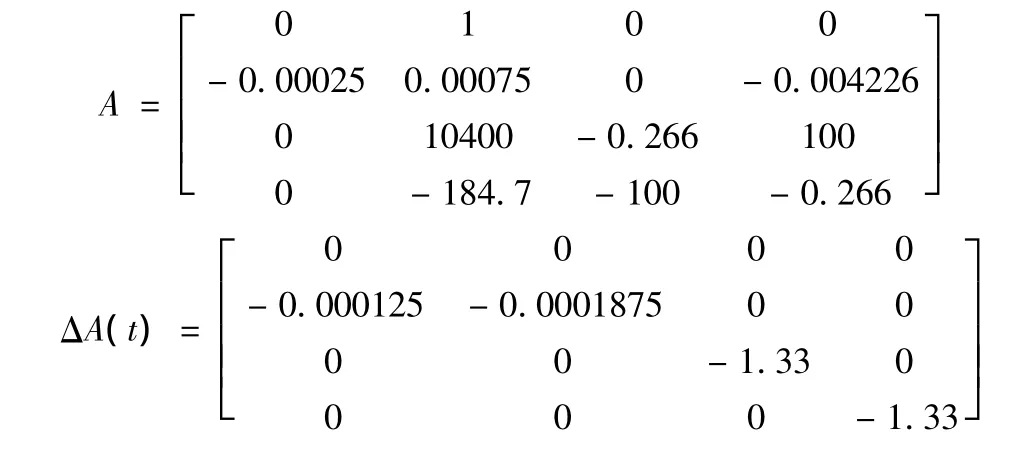
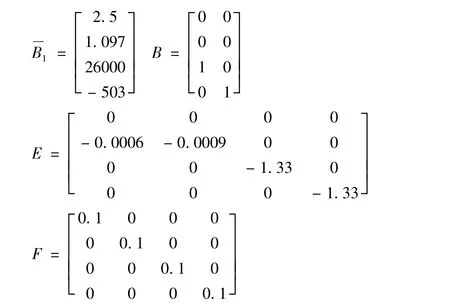
取 θref=0,ωref=2.5 rad/s,idref=0 A,iqdref=260 A。取可能发生的最大偏差值:p1=0.005 Ω,p2=1.5,p3=1,计算式(7)的各项系数,按式(11)指定E,F,取式(12)中ε=100。得
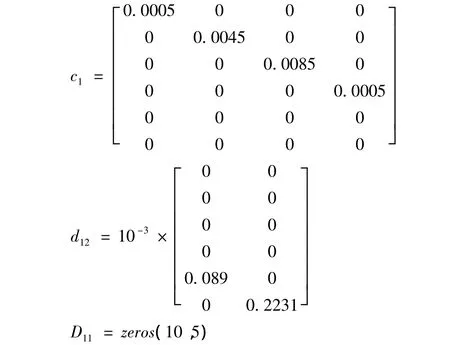
选定加权函数c1和d12,(由式(1)、(13)构成仿真模型来进行加权函数的优化)。
求得状态反馈控制器的反馈系数K

得上述直驱式永磁同步风力发电系统的H∞反馈控制律为
为了节省篇幅,给出下列一种运行情况作为例子进行仿真:设不确定参数Rc=0.01+0.005sintΩ,B=3+1.5sin2t,K=2+sin3t;随着风速变化风力机的转速曲线如图2所示。发电机所希望的输出有功功率(期望值)为 1.8 MW,试作仿真曲线。
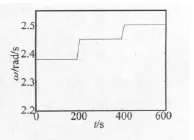
图2 无刷双馈型风力发电机的转速ω
图3给出了当系统具有如上参数摄动和扰动时的仿真曲线,(a)、(b)分别为风力发电机输出有功功率、无功功率,实线为响应值,虚线为期望值(如将视图放大,虚线可以看得更为清楚)。图4(a)、(b)分别为发电机定子d、q轴电流响应值及期望值曲线,图5(a)、(b)分别为H控制器的输出电压 ud、uq。
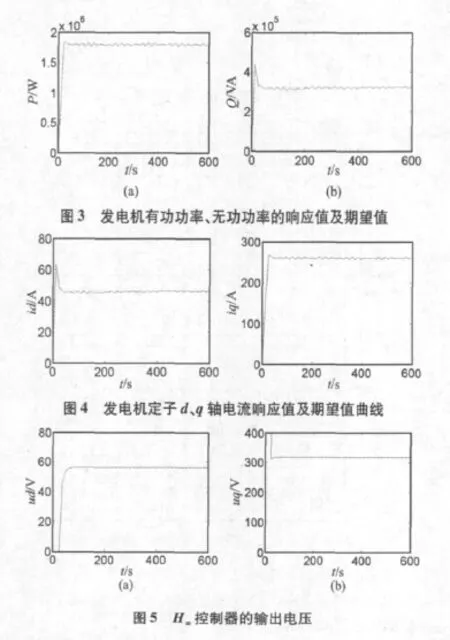
从仿真结果可以看出系统具有很好的跟踪性能,实际响应值跟踪期望值,不受不确定参数和风速变化的影响。
6 结束语
本文对直驱式永磁同步风力发电机的H∞控制进行了研究,建立了直驱式永磁同步风力发电机的鲁棒控制模型,根据H∞控制理论,利用MATLAB工具箱设计了H∞控制器。仿真结果表明,在该控制器作用下,直驱式永磁同步风力发电机具备参数摄动镇定性能和干扰抑制性能,风速变化虽然使风力发电机的转速随之变化,但输出的有功功率、无功功率的实际响应值仍能很好地跟踪期望值曲线,发电机转子d、q轴电流响应值跟踪期望值曲线,安全可靠地获取最大风能,向电网输送恒频恒压的电能。
[1]尹明,李庚银,张建成,等.直驱式永磁同步风力发电机组建模及其控制策略[J].电网技术,2007,31(15):61-65.
[2]高龙,等.非线性系统的 DFL及隐动态[J].清华大学学报,1996,36(9):1-9.
[3]张春朋,林飞,宋文超,等.基于直接反馈线性化的异步电动机非线性控制[J].中国电机工程学报,2003,23(2):99-102,107.
[4]蔡超豪.矢量控制异步电动机的非线性H∞控制[J].中小型电机,2004,31(1):49-52.
[5]丁刚,王勋先,韩曾晋.感应电机的H∞抗干扰控制[J].控制理论与应用,1999,16(4):483-486.
[6]申铁龙.H∞控制理论及应用[M].北京,清华大学出版社,1996:136-151.
[7]Doyel J,Glover K.The mu-analysis and synthesis toolbox of Malab[D].MathWorks Inc,1998.
