自动可视除草机器人系统设计
2011-06-07尹振波
吴 健,闫 磊,钱 桦,刘 广,尹振波
(北京林业大学工学院,北京 100083)
国内外的大多数除草机器人都是采用喷洒除草剂的方式除草,对环境造成了一定污染,也增加了农药残留。因此,很多国家已经颁布法令明令禁止使用化学除草剂。而采用手扶式中耕机或牵引式除草设备除草,既耗时又费力。近年来,国内外的一些科研院所对除草机器人做了大量研究。如美国加州大学戴维思分校生物与农业工程系Slaughter教授的团队介绍了除草机器人原型[1];德国农业专家采用计算机、GPS定位系统和多用途拖拉机综合技术,研制出可准确施用除草剂的机器人,其特点是当机器人到达杂草多的地块时,GPS接收器便会做出杂草位置的坐标定位图,机械杆式喷雾器相应部分立即启动进行除草剂的喷洒[2];南京林业大学陈勇教授等研制了一种除草机器人,由本体、多关节机械臂、末端执行器、杂草识别摄像头和导航摄像头组成[3-4],主要用于控制玉米行间杂草。
除草机器人应用于农业生产中已经相当普遍,而在林木苗圃生产中的应用却不多见。笔者研制的除草机器人主要应用于林地苗圃,采用机械方式对苗圃行间的杂草进行清除。这种方式更加环保。结合国内外的相关研究,将机械式的执行机构安装在机械臂端部,利用现有的机器视觉技术和多传感器融合技术,提高识别的准确性和精确度,实现除草作业的智能化。
1 除草机器人系统
除草机器人系统设计可以分为机械结构设计和控制系统设计。机械系统设计分为行走机构设计和执行机构设计;控制系统设计包括硬件电路设计和控制算法的编写。整个系统框图如图1所示。
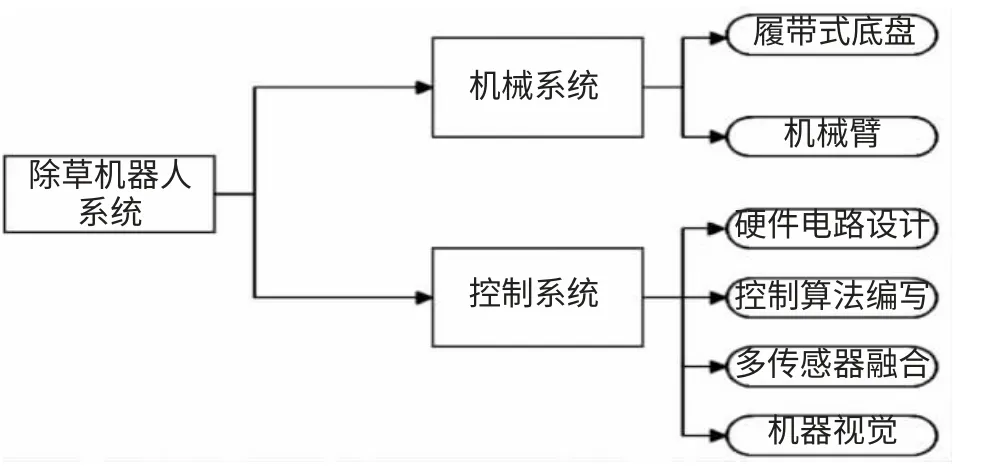
图1 除草机器人系统框图
2 除草机器人机械结构
除草机器人的外形如图2所示,其构成主要有三个部分:移动机器人底盘、机械臂及除草执行机构、图像处理系统和相关的定位传感器。
2.1 移动机器人底盘
移动机器人的底盘一般分为:足式、轮式、履带式和轮履式。除草机器人要在苗圃垄沟之间行走,由于垄沟间的距离较小(40 cm左右),且垄沟笔直平整,所以采用履带式的底盘较适宜(图3)。履带式底盘宽度为30 cm,能保证其在苗圃垄沟中较稳定地通行。
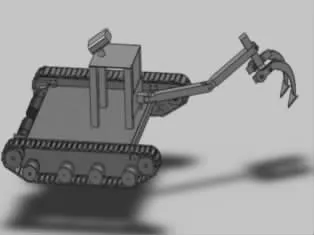
图2 除草机器人三维设计图
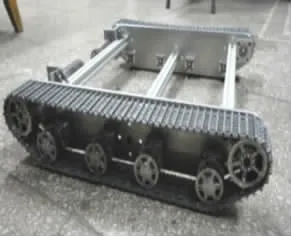
图3 履带式底盘
驱动轮在行走机构中的位置对履带驱动区段的效率有着重大影响的。驱动方式一般分为前轮驱动和后轮驱动。前轮驱动的驱动区段较长,产生的摩擦力矩较大,履带效率就会降低,同时也增加了履带中零件的磨损,所以通常选择后轮驱动[5]。驱动轮与电机之间通过联轴器相连,这样可以保证良好的越障性能,前轮为从动轮,中间的四个小轮则为支撑轮。
2.2 机械臂及除草执行机构
机械臂有2个自由度,由2个步进电机和若干连接件组成,可以实现空间内任意位置抓取,在机械臂手部安装有除草的执行机构。在除草的执行结构方面,国内外有着很多研究,江苏大学设计了一种可以进行株间与行间一体化除草的八爪式除草执行机构[6],机械式除草用得更多的是回转的旋刀或是圆盘。但这种刀具相对来说结构比较复杂,在苗圃中并不实用。笔者设计所采用的执行机构为铲状刀头,除草时刀头深入土中10~15 cm,将杂草连根铲除,从而达到较好的除草效果。图4为除草执行机构的三维设计图。
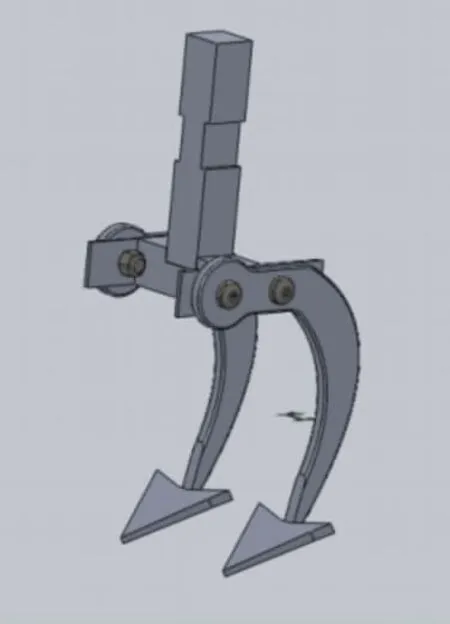
图4 除草执行机构
3 除草机器人控制系统
为了满足露天苗圃的除草作业工作,机器人的控制系统必须拥有强大的数据处理能力,进而完成自主行走、图像处理等复杂工作。除草机器人的底盘和机械臂的控制是利用AVR ATMega128单片机进行控制的,图像处理部分采用的核心芯片是DM6446,两者之间通过串口通信。
3.1 底盘及机械臂控制系统
底盘和机械臂都是应用AVR ATMega128单片机进行控制。底盘由电机带动,即用AVR ATMega128来控制电机转速。采用MAXON电机,额定功率为70 W,经过变速器减速后的额定转速为600 r/min,额定电压为24 V。电机和AVR控制板之间装有电机驱动器。电机驱动采用PWM技术,通过改变PWM波的占空比来改变电机的转速。电机采用双BTS7960大电流(43 A/68 A)H桥驱动,与单片机5 V隔离,能有效地保护单片机,其PWM最大频率为25 kHz。由于苗圃路面条件较平整,所以选用开环控制器同样可以符合要求,这样的设计在一定程度上降低了成本。
在机械臂的两个关节处都装有步进电机,对机械臂的控制本质上就是对机械臂上的步进电机的控制,实现机械臂在空间范围内各个方位的动作。对步进电机的控制同样需要采用步进电机驱动器——ZD-6560-V3,其特点是高集成度和高可靠性。接口采用超高速光耦隔离,抗高频干扰能力强,最高输入电压为DC 40 V,最高驱动电流为3.5 A。
3.2 机器视觉
机器视觉技术在国内外农林生产中有着广泛的应用。在日本,农林机器人很多都应用图像处理技术来识别农作物,并采用多传感器融合的方式来提高执行的精度和效率。除草机器人的图像处理模块主要用于识别杂草,将处理后得到的杂草信息发送给执行机构,使得机械臂上的执行结构将杂草切除。图像处理的核心芯片是DM6446(TI公司),采用达芬奇技术,即集成了可编程数字信号处理器DSP(Digital Signal Processor)内核以及ARM(Advanced RISC Machines)处理器内核的片上系统。
图像通过CCD传感器进行实时的图像采集,对采集来的图像信息通过DSP进行实时性处理,并将处理的结果再反馈给单片机,从而命令单片机控制机械臂进行指定的抓取作业。图5为除草机器人的图像识别和处理模块,他是由一个摄像头、DM 6446的开发板和一个40 G的移动硬盘组成的。CCD传感器捕捉所拍到杂草图像信息,并应用图像分割算法将杂草从背景中提取出来,再通过图像处理模块实现除草机器人的智能作业,以提高工作效率。

图5 图像处理模块
3.3 传感器模块
定位即机器人必须确定它在环境中的位置。机器人上安装了超声波传感器和红外传感器,能准确的避障,使机器人能沿着苗圃的垄沟直线行走。北京林业大学钱桦教授团队制作的喷雾机器人采用的是电子盘和红外避障传感器,在环境条件完全已知的情况下进行全局路径规划,在环境条件部分已知或全部未知的情况下进行局部路径规划[7-9]。该除草机器人底盘上装有电子罗盘以确定机器人运动方向相对于地磁场方向的偏转,获取偏转速度和偏转角[10-11]。在底盘前后各有2个超声波传感器,在两侧各装有4个红外传感器。传感器能够监测机器人周围的信息,将信息传递给主控制板,从而自动调节PWM波占空比来改变电机的转速,利用底盘的差速转弯,实现避障功能。
4 结论
杂草是影响林木作物生长和导致苗圃产量与质量下降的重要原因。化学除草剂虽然可以控制杂草的生长,但除草剂本身对人体及其它生物产生了严重危害。而人工除草作业量很大,旨在设计一款小型基于机器视觉的自动除草机器人代替人工作业。该除草机器人用CCD传感器进行实时图像采集,通过S-video接口将图像传输到图像处理板,应用模式识别算法判别出苗圃中的杂草信息,并传达指令给执行机构完成除草动作。该设计可初步实现智能化作业,提高苗木除草作业的效率。在以后的研究中,图像处理算法将不断改进,以提高作业的准确性,完全实现林业苗圃的智能化除草作业。
[1] Lee W S,Slaughter D C,Giles D K.Robotic weed control system for tomatoes[J].Precision Agriculture,1999,1(1):95-113.
[2] 赵 欣.智能机器人在农业自动化领域的主要应用[J].中国农业通报,26(10):360-364.
[3] 侯学贵,陈 勇,郭伟斌.除草机器人田间机器视觉导航[J].农业机械学报,2008,39(3):106-108.
[4] 郭伟斌,陈 勇.基于模糊控制的除草机器人自主导航[J].机器人,2010,32(2):204-209.
[5] 南京林产化工学院主编.内燃机与林用车辆理论[M].北京:中国林业出版社,1995.
[6] 周恩权,毛罕平,陈树人.八爪除草机构的设计与实验[J].农机化研究,2011,(2):62-65
[7] 杜利超,钱 桦,肖爱平.大棚喷雾作业机器人底盘的设计与研究[J].广东农业科学,2010,37(5):196-197.
[8] 杜利超,钱 桦,肖爱平.大棚喷雾作业机器人的行为控制与路径规划[J].广东农业科学,2011,38(1):185-188.
[9] 杜利超,钱 桦,肖爱平.路径规划技术及其在大棚作业机器人中的应用[J].湖北农业科学,2010,(5):1205-1208.
[10]郝昕玉,姬长英,Xin-yu,等.自主移动农用机器人导航系统故障诊断分析[J].江西农业学报,2010,(12):153-154,161.
[11]王 辉,程 雪,李玉霞.农业机器人应用进展初探[J].安徽农业科学,2009,(16):7674-7675.
