捷联惯导高精度加速度计信号采集单元的设计与实现*
2011-05-06鲍海阁王国臣
鲍海阁,赵 涛,王国臣
1.海军驻长春航空军事代表室,长春 130051;2.海军驻锦州地区军代表室,辽宁 锦州 121000;3.哈尔滨工程大学自动化学院,哈尔滨 150001
在捷联惯性导航系统中,加速度计及加速度计采集单元的性能对惯导系统的精度影响很大,一个高精度的惯导系统不仅要求加速度计有良好的性能,还要求加速度计采集电路的高精度和高稳定性。目前,石英挠性加速度计制造技术已十分成熟,具有精度和灵敏度高、功耗小、热稳定性好等特点。而国内的加速度计采集电路多采用 I/F转换电路、或者16位 A/D转换器及 I/F+A/D的方法。I/F转换电路往往用分立器件搭建,体积和功耗较大,其转换速率慢、分辨率低。16位 A/D转换器的理论精度都不能超过 15×10-6,对于 I/F+A/D的方法,电路复杂、不适合多通道,要保证 I/F的测量精度,需加温控电路,整个电路板体积大,不适合捷联导航体积小的发展方向,不能满足惯性导航系统的要求[1-2]。针对这种现状,本文提出一种高精度的加速度计采集单元设计。
1 总体设计及分析
1.1 采集单元基本原理
石英挠性加速度计采集单元的基本原理是将石英挠性加速度计其与外部加速度成正比的输出电流信号经采样电阻转换为电压信号,经模拟滤波后,送入 A/D转换器,从而转换成可用的数字信号[3]。原理图如图 1所示。
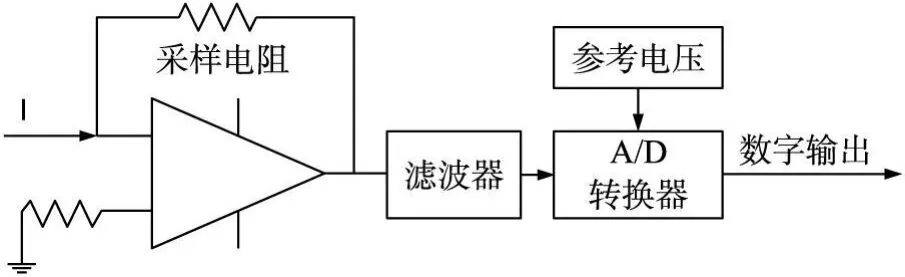
图1 加速度计信号采集电路原理图
由图 1可知,加速度的值为

其中:a—加速度值;K—加速度计标度因数;Iin—加速度计的输出电流;V—A/D转换器的输入电压;Rf—采样电阻的电阻值。
1.2 性能指标分解
惯性导航系统对加速计的性能要求是综合了加速度计本身以及加速计采集电路的性能后的总体指标。以加速计的零偏为例,若加速计本身的零偏稳定性为 aμgn,采集电路的零偏稳定性为 bμgn,则最后总的零偏稳定性为:

c的值不应超过惯性导航系统对加速计零偏性能指标的要求。
在精度要求较高的场合,加速度计的价格一般比采集电路的价格要高出许多,一般在一个量级以上。因此,设计中采集电路的性能与加速计本身的性能相比,应尽可能地好,以便充分发挥加速计的性能[3]。
本设计采用 JN-06G-03石英加速度计,其精度很高,而且有较强的抗干扰能力,能感受的最小加速度为 10-5gn,线性度在 0.01%。具体性能指标如下[4]。
输入量程:±25 gn;偏值:<2mgn;标度因数:1.4~1.6mA/gn;偏值月综合误差:<10μgn;偏值温度系数:<10μgn/℃。
从而给出加速度计采集电路的设计性能:
量程:±10mA;零偏温度系数:1μV/℃;零偏24 h稳定性 :2 μV;噪声:1 μVrms@100 Hz/s;数据输出速率:100Hz/s。
1.3 采集电路的性能分析
1.3.1 零偏稳定性
在惯性导航系统中,零偏稳定性是陀螺和加速度计最重要的性能指标。有源器件都会影响系统零偏稳定性,通过观察原理图可以看出,采集单元中的有源器件运算放大器和 A/D转换器,它们的零偏稳定性都将直接影响采集单元的零偏稳定性[5]。
运算放大器的零偏由输入零偏电压和输入失调电流 Ios引起的零偏电压的合成,符号分别为 Vos和V′os。 Vos含义是输入为零时,正输入端相对于负输入端的电压值。Ios表示输入为零时,正输入端和负输入端的电流值的差。那么由Ios引起的零偏V′os为:

其中 RP表示运算放大器正输入端的补偿电阻。
温度和时间的变化会使运算放大器的 Vos发生变化,分别称之为温度系数和时间稳定性。决定A/D零偏稳定性主要是它的温度系数,一般的 A/D转换器很少有零偏时间稳定性的性能指标,这是因为高精度的 A/D转换器内部带自动标定功能,所以零偏的时间稳定性较高,基本可以忽略不计。1μV/℃的输入零偏电压温度系数和 0.1 nA/℃的输入失调电流温度系数对于运算放大器是一个可以接受的性能指标。
1.3.2 噪声和动态响应
除了零偏稳定性外,噪声和动态响应也会影响采集单元的性能。系统运行时,导航算法需要的是加速度计信号的积分值。因此采集单元对加速计信号噪声的要求并不苛刻,但是过大的噪声也会湮没真实值。噪声的大小与系统带宽均方根成正比,也与选取的元器件密切相关。过窄的动态响应使高频的加速度信号被滤除,对系统性能会产生不利影响;而过宽的动态响应带宽会增加系统噪声,需要对两者做一个折衷。船用的惯性导航系统带宽不用太大,10 Hz左右即可。但是通带的响应的一致性要好,因此滤波器选用最大平坦滤波器。不过即使最大平坦滤波器的通带响应也是随频率衰减的,为了避免通带内衰减过大并考虑滤波延时及带宽对精度的影响,滤波器带宽设为 100 Hz。这样在 10 Hz内对系统性能生产的不利影响基本可以忽略,而且噪声也不会太大[6]。高阶的无源滤波器比较复杂,成本较高,而有源滤波器又噪声过大,所以选取二阶无源滤波器。船用的设备虽然对功耗没有很大限制,但是较大的功耗导致较大的温升,影响精度,所以选择功耗尽可能小的元器件对系统精度是有好处的。
2 电路设计及仿真
2.1 关键器件选择
2.1.1 运算放大器
根据系统指标要求,运算放大器采用模拟器件公司的 AD708。AD708是高精度,双运放装的运算放大器,每个运放都能提供非常出众的直流性能,两个运放之间的匹配是现有的运放中最好的。它可以达到的开环增益至少为 5 V/μV,0.1Hz到 10 Hz的最大输入等效噪声为 0.35μVp-p。所有的直流特性都具有非常高的温度稳定性:零偏电压温漂 0.1μV/℃;输入偏值电流的温漂为 25 pA/℃。AD708典型的开环增益为 10 V/μV,共模抑制比(CMRR)140 dB使得它非常适合于精密的应用场合。
2.1.2 采样电阻
由标定因素稳定性可知,采样电阻的精度直接影响采样电路的精度,要取得高精度的电路性能,就要选取高精密度的采样电阻。高精密电阻最重要的指标是稳定度,其次是温度系数等其它指标。以前常说的“误差”已经被不确定度、允差替代了。电路设计时,选用的电阻是 VHP101,因为购买很不方便,本设计在实验时,采用了相对容易的购买的替换型号 VSNP0805。它的温度系数为 0.6×10-6/℃,2000 h稳定性为 50×10-6。
2.1.3 A/D转换器
选择了凌力尔特(Linear Technology)公司的LTC2445,这是一个 8 kHz、8通道的 24位 Δ-∑模数转换器。该转换器可连续地测量并自动消除外部放大器、滤波器和其它用于传感器输出的信号调整电路的所有偏移和漂移误差。LTC2445的可编程滤波器允许设计者对个别通道定制 20个不同的速度/分辨率组合,最好可提供 200 nV噪声,并同时提供50 Hz和 60 Hz线频噪声抑制。高速采样方面,在输出速率为 8 kHz时,ADC支持超过 17个有效位。LTC2445在全温度范围内(-40℃到 +85℃)DNL小于 1 LSB,失调误差为 0.5 mV,失调误差温漂0.02μV/℃,正负满量程误差为 VREF的 2.5×10-6,温漂 0.3×10-6/℃。电源电压 VCC在 5 V和 5.5 V之间,VREF为 5 V时,INL的值为 VREF的 2×10-6[7]。
2.1.4 参考电压
参考电压主要的器件选用凌力尔特公司的LTZ1000,在使用时,可以根据公司提供的参考设计设计具体的电路。图 2就是凌力尔特公司提供的应用参考电路图。
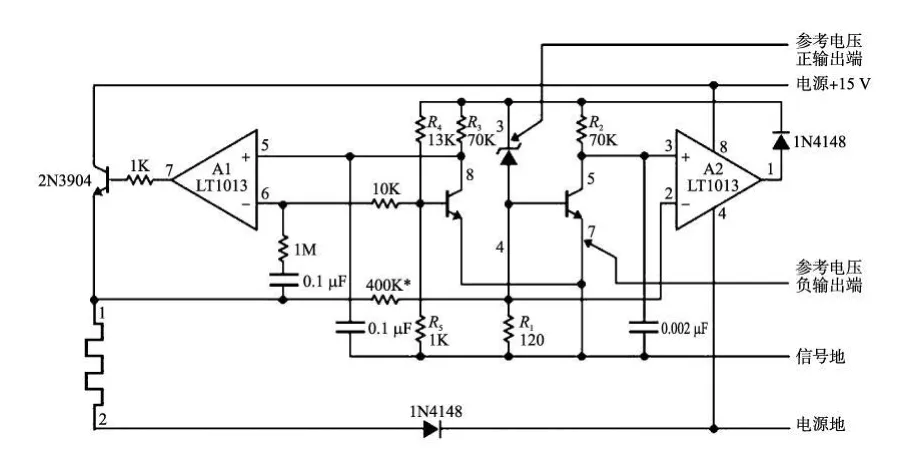
图2 LTZ1000电压参考电路原理图
电路并不太复杂,很多元件都是LTZ1000内部的,关键元件为 R1到 R5,其中 R1和 R4/R5最关键,每 100×10-6的变化会导致输出 1×10-6的变化,R2每 100×10-6的变化会导致输出 0.3×10-6的变化,R4每 100×10-6的变化会导致输出 0.2×10-6的变化。实际上,通过测试,R1变化对系统影响不大,R3的变化也非常小,但R2的变化影响就超出原来的说明。在实际设计中,关键元件R1,R2,R4,R5选用济宁正和公司的RJ711,较关键的 R3选用济宁正和的 RX70。
LTZ1000输出的参考电压在 6.9 V到 7.2 V左右,而 A/D转换器需要的是 5 V的参考电压。因此需要对 LTZ1000输出的电压进行分压,才能得到所需的 5 V电压。加速度计输出电流,经采用电阻采样后成为单端的模拟电压。而对于 A/D转换器来说,差分输入比单端输入有诸多好处。需要把单端模拟电压转换为差分形式,这又需要一个 1/2VREF,即 2.5 V的参考电压。采用三个阻值相同的电阻,对 LTZ1000输出的 7伏左右的参考电压进行分压,得到一个 2.3 V左右和 4.6 V左右的电压,可以满足 A/D转换器和单端转差分电压的需要。
2.2 采集电路设计及仿真
采集电路的作用是将加速度计输出的电流信号转换为电压信号,经滤波后送入 A/D转换器,并将转换结果通过光电耦合器传给处理加速度计信号的电路。
用电阻对电流进行采样转换成电压,一般有两种方式:分流式和反馈式,他们的原理分别如图 3和图 4所示。
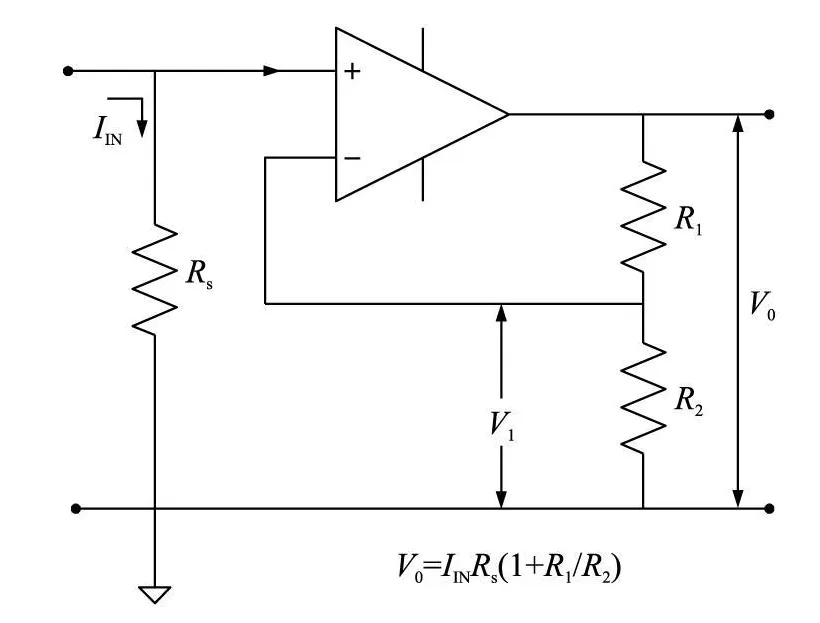
图3 分流式电流采样原理图
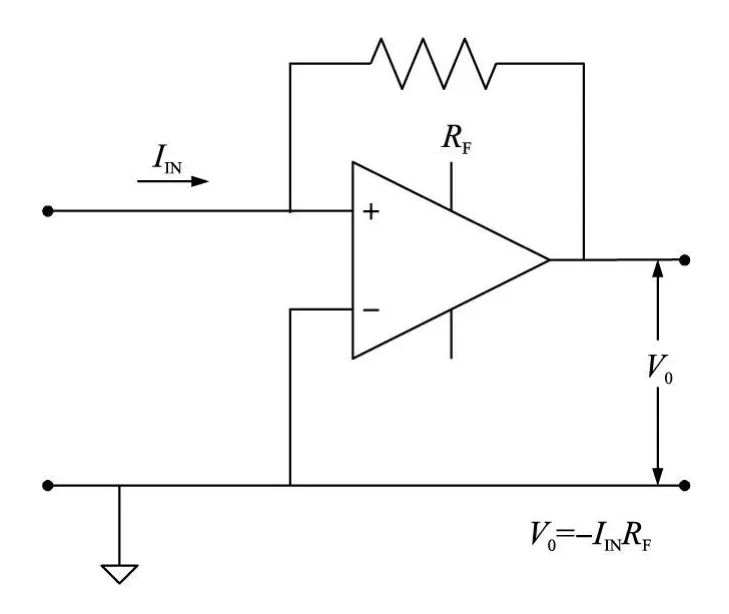
图4 反馈式电流采集原理图
本设计中,采用反馈式检测方法。采用这个检测方式,可使加速度计的输出端电压为零(或一个固定的值),减小输出电压对电流的影响,提高检测精度。
采样电路的电路图如图 5所示,运放正输入端的 2.5 V参考电压改变采样后采样电压的直流电平。2000 pF的电容与采样电阻组成低通滤波器,可以滤除一些高频噪声。
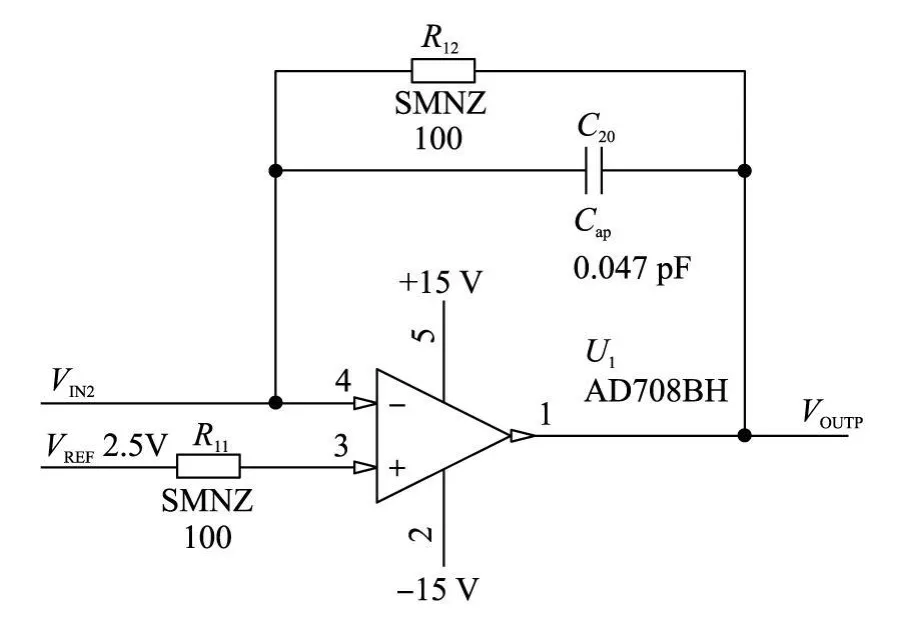
图5 采样电路电路图
采样电压是单端形式的,而 A/D转换器的输入是差分形式的,需要把采样电压转换为差分形式。电路如图 6所示。
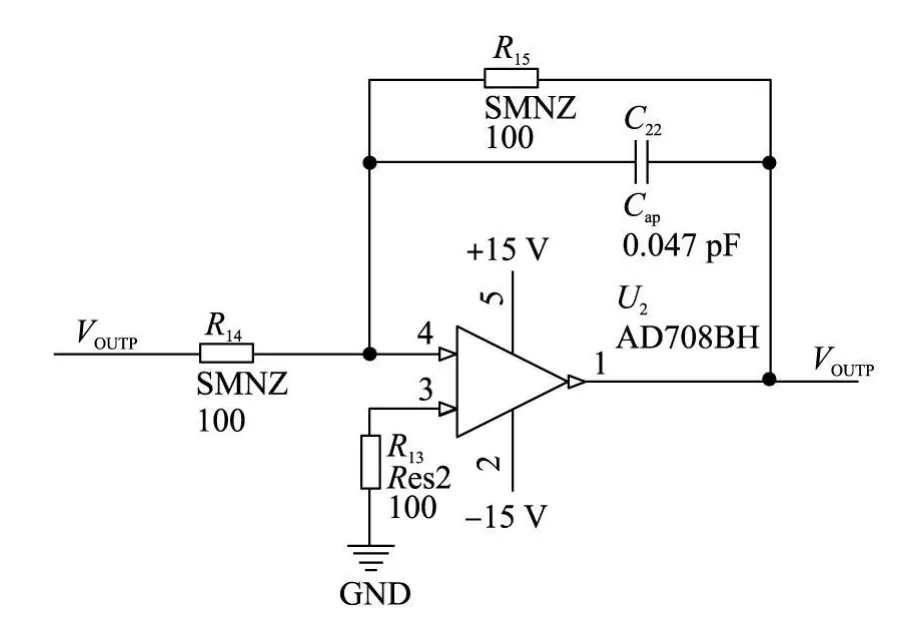
图6 单端转差分电路
电压转换成差分形式后,对其进行滤波,图7[11]是用 OrCAD画的滤波器的电路原理图,运放AD708采用 Analog Devices公司官方的 AD708的spice模型。
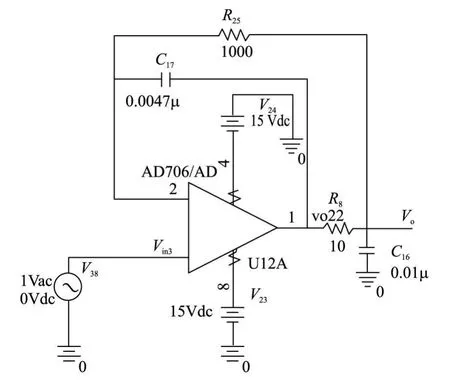
图7 滤波器仿真原理图
图7是滤波器的仿真结果。横轴是信号的频率,纵轴是输出电压,其中输入电压为 1 V。惯导系统感兴趣的加速度频段一般不超过 100 Hz,因此,在 500 kHz上的超调并不会对系统性能产生不利影响。
图8是仿真结果的局部曲线,图给出的是在100 Hz是的放大图,从图中可以看出:在 100Hz时,滤波器的误差很小,小于 0.1×10-6,不会对信号精度造成损伤。
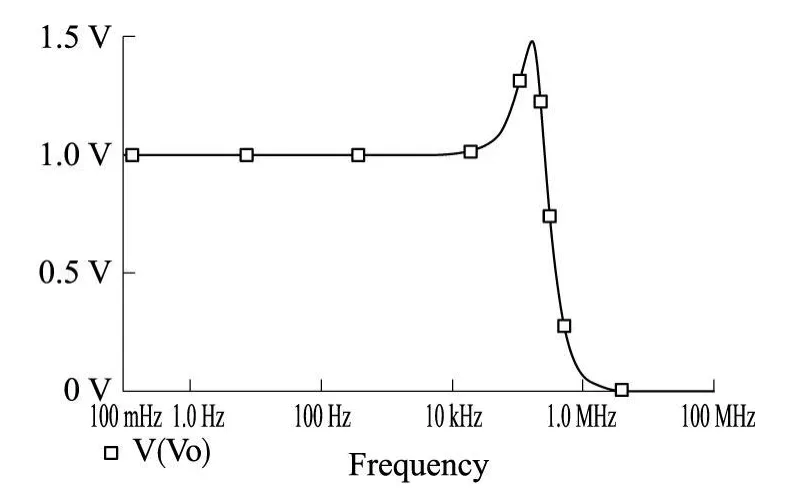
图8 滤波器仿真结果
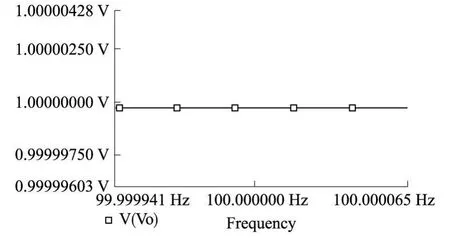
图9 仿真结果局部曲线
3 性能测试
3.1 噪声
测试噪声时,采集单元电路输入端接地,连续采集 1 min,采集的结果送入电脑,用 Matlab进行分析,可得到电路总的噪声。为了避免温度等其它因素对电路的干扰,应将电路板放在温度比较恒定,电磁干扰小的环境中。本文测试时,直接将电路放在温箱内,温度波动小于 0.1℃,基本可忽略温度对电路的影响。下图是数据输出速率在 880Hz/s时,采集 1 min后,数据的直方图。图 10的横轴是消除零偏后的数据,单位是 μV,纵轴是数据的个数。整组数据的标准差为 δ=2.4μV,也就是说噪声值可以近似认为 2.4μVrms。从图中可以看出,采集得的数据所做的直方图,形状较好,在 3δ内没有数值点的缺漏。
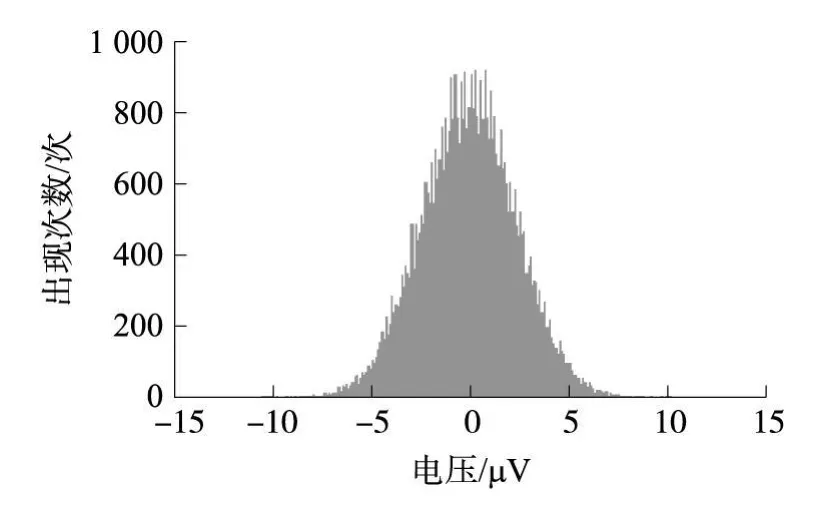
图10 880Hz/s时数据直方图
由于导航系统实际需要的加速度计信号是 100 Hz/s左右的,为了进一步提高性能,对于输出 880 Hz/s的数据,可以采用 8个数一组,取平均数的方法来降低信号的噪声。采用上述同组数据,并对相邻的每 8个数求一个平均数,可以得到一组新的数据。这组新数据的速率是 110 Hz/s,基本接近导航系统 100 Hz/s的要求。这组数据的标准差是 0.99 μV,虽然这组数据的形状没有元数据好,但是也基本可认为是正态分布的,因此这组新数据的噪声为0.99μVrms。这组数据的直方图如图 11所示。
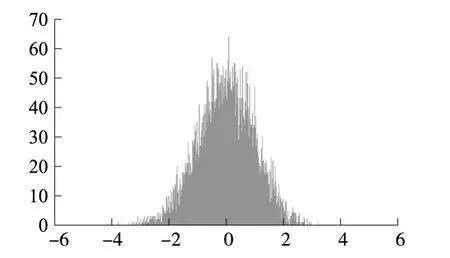
图11 110Hz/s时数据直方图
3.2 温度稳定性
测试温度零偏稳定性时,同样采集单元输入接地,上电两个小时后开始测试。系统的工作点设在25℃,因此测试温度在 20℃到 30℃之间变化。将系统放在温控箱中,逐渐将温控箱温度从 20℃上到30℃,测试所得曲线图 12所示。图中横轴是测试的温箱温度变化,纵轴是输出的零偏值的变化。该图中零偏值没有进行处理,直接采用采集所得的原始数据。由图可知,零偏从 6μV左右变化到 16μV左右,变化了 10μV,平均大约是 1μV/℃,符合设计的指标。
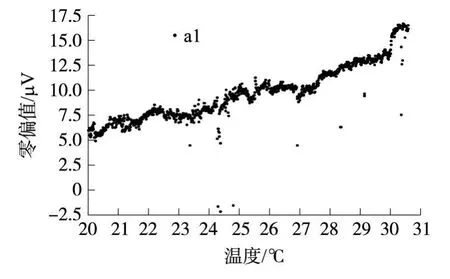
图12 零偏的温度效应
3.3 时间稳定性
将测试电路置于温控箱内,设置温箱温度为25℃,变化不超过 ±0.1℃。上电后,连续运行24 h,测试曲线如图 13所示。图的横轴是系统运行的时间,单位为 h;纵轴是去除零偏值后,零偏的变化值,单位为微伏。需要说明的是,这并非是采集的原始数据,而是用 Matlab对原始数据做九次多项式拟合后的曲线。原始的数据中包含噪声的成分,噪声的大小甚至略大于零偏值的变化。因此,包含噪声的数据图中,肉眼无法看出零偏漂移的趋势。用 Matlab做九次多项式拟合,基本消除了噪声了影响,可以更明显的看出系统随时间的漂移的变化[16],24 h内零偏在 0μV到 2μV内变化,符合设计的指标。
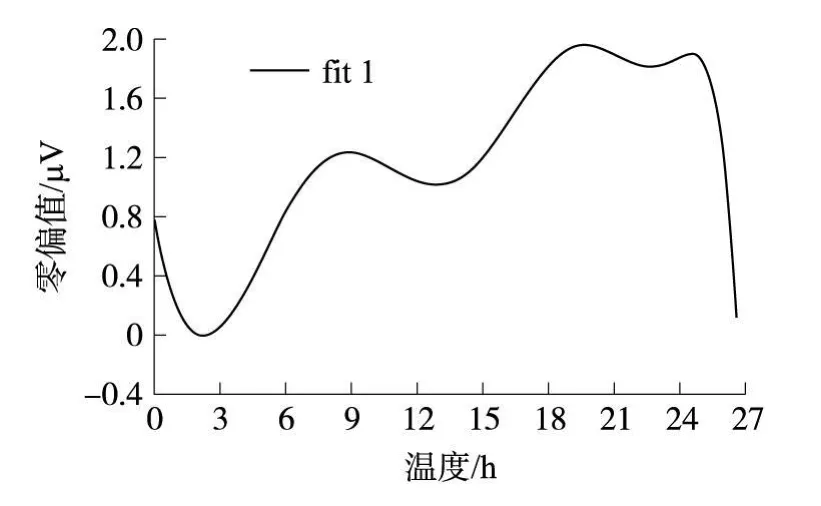
图13 零偏随时间的变化
4 结束语
加速度计是惯性导航系统的重要器件。对于高精度石英挠性加速度计来说,加速度计和加速度计采集电路的综合性能才是惯导系统中有效的性能,两者缺一不可。本加速度计采集电路设计中,元器件的性能仍然是限制电路性能提高的主要因素,为了使电路达到微伏级的精度,采样电阻、参考电压、运算放大器和 A/D转换器的都需要精心选择。每个元器件需要的性能都是在计算采集电路指标后得出的,不能随意更换。
高精度模拟电路容易受到各种干扰,本文对实际的采集电路进行了大量、严谨的测试,测试过程中充分考虑了温度、时间等因素的影响。分析测试数据后,发现对采集电路在相隔长时间(几个月)、多次测量(几十次)的情况下,得到的性能结果有很好的一致性,这些性能达到了设计时的指标。这说明,测试的结果是可以信赖的,设计所得的采集电路性能是符合预期指标的。
[1]陈哲.捷联惯导系统原理[M].北京:宇航出版社,1986.1-9.
[2]张树侠.捷联式惯性导航系统[M].北京:国防工业出版社,1992.2-7.
[3]华成英.模拟电子技术基础(第 3版)[M].北京:高等教育出版社,2000.55-57.
[4]Sergio Franc.Based on Operational Amplifier and Simulation Integrated Circuit's Circuit Design[M].Higher Education Press.1992.5-57.
[5]Johan H Huijsing.Operational Amplifiers[M].Kluwer Academic Publishers.2006.1-258.
[6]Linenar Technology Corporation.LTC2444/LTC2445/LTC2448/LTC2449 24-Bit High Speed8-/16-ChannelΔ∑ADCs with Selectable Speed/Resolution[S].2004.
[7]张伦东.机抖激光陀螺控制电路的研究与优化[D].硕士学位论文.长沙:国防科技大学.2005.
[8]顾英.惯导加速度计综述.控制与制导[J].2001,6:78-85.
[9]Linenar Technology Corporation.LTZ1000/LTZ1000A Ultra Precision Reference[S].2004.
[10]Youbao Xi,Miao Ling-juan.Synchronization pulse-duration modulation type hr ADC research[C]//IEEE Transactions on Aerospace and Electronic Systems.2004:40-45.
[11]FengSun,Chen Jingyuan,Gao Wei.Improved design of laser gyroscope SINSdata acquisition card[C]//Proc IEEE Int Conf Mechatronics Autom,ICMA.Harbin,China:IEEE.2007:3390-3395.
[12]Wang Kedong,Gu Qitai.The influence of noise on output of Ring Laser Gyroscope[J].Sensors and Actuators A(Physical),2005,119(1):75-83.
[13]杨鹏翔,秦永元,游金川.加速度计组件温度特性在系统建模[J].传感技术学报,2009,22(12):1690-1695.
