高超声速风洞舵面测力双天平技术及应用
2011-04-15陈河梧
陈河梧 ,刘 展,熊 琳
(中国航天空气动力技术研究院,北京 100074)
0 引 言
舵面是飞机、导弹和航天飞行器的主要控制面。特别是在稠密大气层的高超声速飞行条件下,为了获得足够的机动能力,主要依靠舵面的偏转方式和偏角大小,直接为机动飞行的俯仰、偏航和滚转提供控制力矩。但是,随着高超声速Ma数的增大,舵偏气动效率会明显下降。又由于舵面处在高速高温气流中,舵体之间的激波干扰,以及激波边界层干扰,也会导致严重的气动加热。气动力/热载荷的双重作用,严重影响到舵面的控制特性,从而直接威胁飞行的稳定性和机动性。从理论上准确数值模拟舵体交接处具有三维特征的粘性流场并非轻而易举。因此,以舵面天平为测力技术手段的风洞试验,仍然是预测舵面气动特性的重要技术途径。
目前,依靠一种新型轮毂式天平,使高超声速风洞实现飞行器部件多天平测力成为可能。
1 双天平测试技术的设计特点
1.1 基本思路
由于限重,舵机的功率不可能过于富裕,一般总是把舵轴布置在很靠近弦向压力中心附近,铰链力矩本来就不大,加上高超声速风洞气流动压低,使得气动载荷相对较小,测准铰链力矩历来是公认的难题。传统意义上的纵轴分离式铰链力矩天平,在天平结构设计时,把测量铰链力矩分量的元件(应变梁)与测量其它分量的元件相分离,测量舵安装在铰链力矩元件上,再使用铰链帽安装在五分量杆式天平上,并通过尾支杆在模型内腔中纵向连接。这种天平结构可以充分利用模型纵轴方向的空间,但要同时布置多天平分别测准部件(如升降舵、方向舵、襟翼等)气动力和力矩分量,从天平结构布局中同时合理地分配各单元载荷及相互间干扰,以及协调解决灵敏度与强度、刚度之间的矛盾,则不易办到。
1.2 双天平测量装置
轮毂式铰链力矩天平的结构,因其外形小巧(见图1)可随意放置在全模型纵向腔内的任意位置,横置或斜置,一片测量舵使用一杆天平,既可实现双天平部件测力,又可保证天平轴线与舵面转轴重合,改变舵偏角时,舵面与天平一起相对于体轴偏转。天平轴系与舵面轴系相一致,天平直接测出的是操纵面轴系的空气动力载荷,不需再作坐标轴系转换。

图1 轮毂式天平架构Fig.1 Sketch of the balance in form of wheel hub
1.3 隔热技术措施
在高超声速风洞中,由于防止气流冷凝的需要,工作气体必须事先预热。风洞高温气流运行几十秒,甚至2min,会使天平应变片和弹性元件产生热应变。这时,可设计用玻璃钢材料制作的天平元件包罩,以防止天平元件因受热而产生的温度效应。同时,为了尽可能防止热气流从舵轴缝隙间窜入内腔,舵体之间可设计成迷宫形式与天平连接。
2 风洞和模型
2.1 风 洞
试验使用的暂冲、吹引式高超声速风洞,带封闭室自由射流试验段,以空气为工作介质。喷管出口直径为φ 0.5m。采用更换喷管的办法改变Ma数,其范围为5~10。
现有支撑模型天平的快速插入式四自由度机构可使迎角变化范围为-10°~50°;固定式弓形机构只能使迎角在-10°~25°范围内变化。风洞光学纹影流场可实时显示和拍摄。
2.2 模 型
试验模型为一种舵-体组合气动外形,其尾部布局十字形4片切尖三角形控制尾翼,半展与根弦比为0.38,平均气动弦长0.05m,相邻舵间交角均成90°。尾翼控制面通过角度垫块实现舵偏角变化,其安装示意如图2所示。
试验中规定左右两侧平置尾翼为测量舵,每片舵通过转轴与其专用的天平连接。一次试验中,左右舵分别改变同一角度的正负偏角。最终完成Ma=6,模型迎角从 0°~ 35°;舵偏 0°、±10°、±20°、±30°条件下尾舵气动特性的测量。
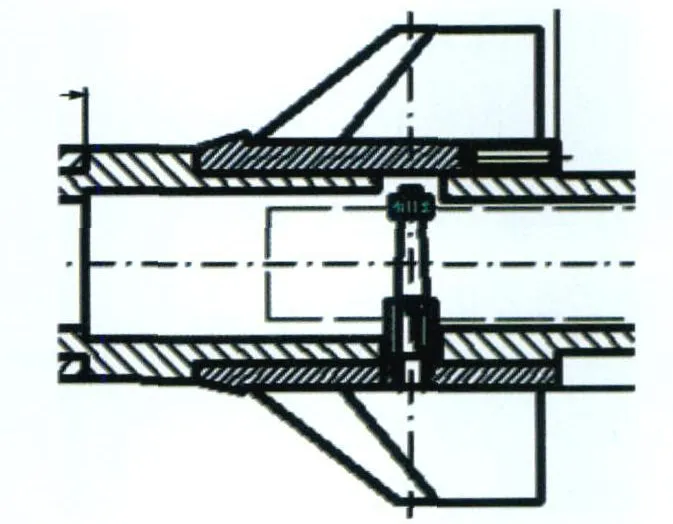
图2 舵面外形及安装方式Fig.2 Tails Configuration
3 结果和讨论
3.1 法向力特性
高超声速气流沿着体表面绕过大偏角(实际是预置角与舵的当地迎角的叠加)舵面时,舵体之间的激波干扰,以及激波与边界层干扰,会产生舵面法向力CN随迎角α增大变化的非线性效应。图3描述不同舵偏角δ时,CN与α之间的定量关系。对于零舵偏的情况,可以算出 α=10°、20°、30°时,ΔCN/Δ α分别为0.015、0.024、0.030,充分表明 CN随迎角增大变化明显存在的非线性效应。

图3 法向力CN随δ、α增大的变化Fig.3 Variation of CNat increasing δ and α
再以α=0°为例看舵面效率如何变化。当舵偏角从 δ=0°分别增大到 10°、20°、30°时,ΔCN/Δδ分别为0.013、0.018、0.027。舵偏角的增大显然也引起控制力的迅速增长。图3非常直观地反映出舵面效率随迎角和舵偏角的增大而逐渐提高的变化趋势,这种俯仰高效率一直保持δ=30°的操纵偏角,迎角可以大到α=30°,而且是迎角愈大,偏舵的气动效率贡献也随之增加。这个气动特点似乎也证实了文献[2]的分析:高超声速Ma数俯仰效率相当高,一般情况下,大迎角大舵偏角不会太快出现舵翼失速。
3.2 铰链力矩特性
铰链力矩的参考点取在舵的转轴上。舵面坐标系的规定使正的舵面法向力产生负方向的铰链力矩Cmh。图4给出铰链力矩随舵偏角的变化。δ=10°、20°、30°正舵偏角,Cmh随迎角增大而朝负方向急剧增大。在大迎角大舵偏角状态,Cmh如同CN一样,出现明显的非线性变化。全动式尾舵的偏角加大,显然能提供足够的控制力矩 。δ=-5°、-10°、-20°、-30°负舵偏角,负法向力的贡献使Cmh随迎角增大虽然也负值增长,但负舵偏角的操纵力矩比之正舵偏角而言,已大大地减弱。
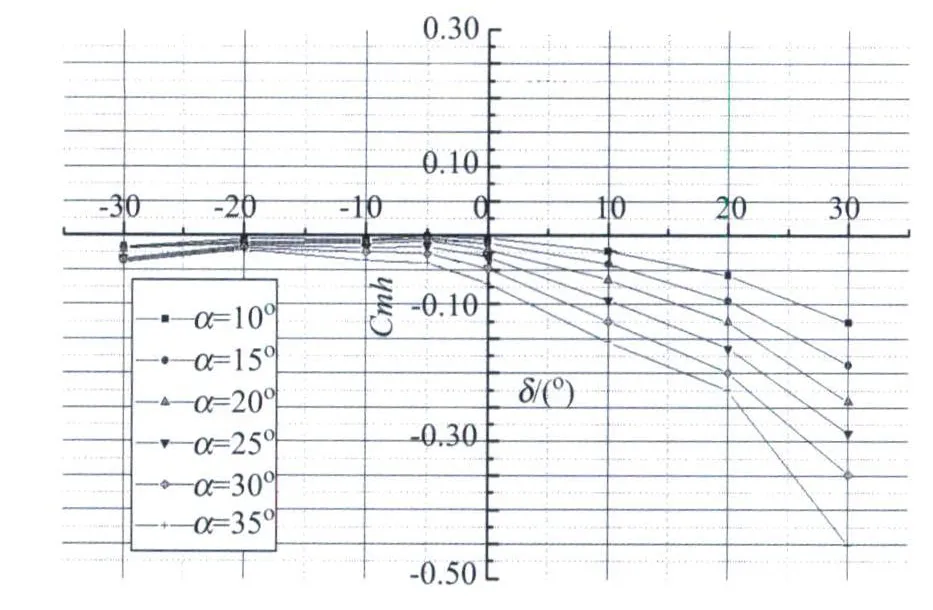
图4 铰链力矩Cmh随δ、α增大的变化Fig.4 Variation of Cmhat increasing δand α
3.3 弦向压心位置的变化特性
弦向压力中心是舵面法向力和铰链力矩的导出量。从平均气动弦前缘顶点起相对于平均气动弦长的弦向压心系数Xd随α、δ的变化情况表示如图5。当CN>0,-Cmh使弦向压力中心位于转轴之后。从图5看出,δ从 0°到30°的增大,弦向压心位置相对于舵轴向后的移动量也缓慢加大。在α=0°~35°迎角范围内,弦向压心离开舵轴的后移范围大约为5~6mm,舵面应基本上处于可操纵状态。国外研究一种尾-身组合体类似气动布局的舵面气动特性[3],但仅限于Ma=3超声速范围。其结果,舵面弦向压心大致有5mm的变化范围。在量级意义上讲,至少可以说明轮毂式双天平舵面测力结果的准确程度。
从一般的定量描述看来,大迎角大舵偏角下流场的非线性引起压心小量的移动,都会导致舵面铰链力矩发生明显变化。图5所示+δ和α的增大,似乎并不大明显引起压心移动变化。因此,只要恰当选择舵轴相对于根弦的位置,就应可以限制Cmh在较小范围内变化,从而尽可能降低伺服机构的需用功率。

图5 弦向压心 Xd随δ、α增大的变化Fig.5 Variation of Xdat increasing δ and α
4 结 论
综上所述,归纳为3点结论:
(1)高超声速条件下,舵面俯仰控制效率相对较高,而一直保持到大舵偏角,甚至在大迎角下仍不出现舵面失速现象。这一特点有利于舵-体布局通过加大舵偏角和迎角范围而获得更大的控制力增量;
(2)舵面偏转角从定量关系上主导着铰链力矩变化,偏角大,控制力也增大。但是弦向压心并不因偏角增大而明显移动;
(3)轮毂式天平结构简单,可随意竖置或斜置,完全适于舵面双天平乃至多天平测力。
[1] 熊琳,刘展,陈河梧.舵面天平技术及其在高超声速风洞的应用研究[J].实验流体力学,2007,21(3):54-57.
[2] NIELSEN J N.Nonlinearities in missile aerodynamics[R].AIAA 78-20,1978.
[3] DERRICK J N,SPRING D J,WINN G C.Aerodynamic characteristics of a series of bodies with and without tails at Mach number from 0.8 to 3.0 and angles of attack from 0 to 45 degrees[R].AD A-028324,1976.
