星载遥感器的精密热控设计
2011-03-27王永宪王志宏高明辉
王永宪, 王志宏, 高明辉
(中国科学院长春光学精密机械与物理研究所,吉林长春 130033)
0 引 言
目前,星载遥感系统在地球资源监测、天文观测、灾害监测及军事侦察等方面已经获得越来越广泛的应用。星载遥感器已成为人类认识自然、探索外层空间的重要工具[1-5]。由于离轴式星载遥感器在轨运行过程中直接暴露于冷黑空间,受到太阳辐射、地球红外辐射和地球阳光反照及冷黑空间的交替作用,以及遥感器表面各部分接受辐射能量的不均匀性,将造成其表面温度分布的不均匀性和波动性。同时,遥感器内部CCD组件的工作也会对遥感器的温度产生影响。
由于离轴式星载遥感器结构和载荷非对称性,即使遥感器的整体温度水平变化均匀,光机结构也将产生非对称几何尺寸变化。由热引起的光机误差将导致星载遥感器的视轴漂移(LOS)和波前畸变(WFE),严重破坏成像质量,甚至无法成像。在温度梯度下光学元件变形不仅带来离焦量,还会产生球差等附加像差,并使其光学表面产生畸变,破坏成像质量。为保障星载遥感器在空间环境条件下能正常工作并实现高质量成像的要求,必须在针对具体温度环境和遥感器自身特点进行精密热控设计的同时进行仿真分析,预示在轨遥感器的温度分布,采取相应的热控措施,以保证遥感器在整个工作期间温度维持在要求的范围内。
1 轨道外热流的计算[6]
遥感器与太阳及地球的相对位置不断变化,遥感器表面所接收的外热流也在不断变化,用于对地观测的高分辨力遥感器运行在太阳同步轨道上。所谓太阳同步轨道就是轨道平面进动方向与地球公转方向大致相同,进动角速率等于地球公转平均角速率(0.985 6°/d)的人造地球遥感器轨道。轨道上的遥感器以固定的地方时观测地球,有较固定的光照条件。太阳视线与遥感器轨道平面的夹角不变,当遥感器每次飞越某地上空时,太阳都是从同一角度照射该地,亦即遥感器每次都在同一当地时间经过该地,这对遥感器成像有利,因为每次对某地拍摄的照片都是在同一照度下取得的,通过对比可以获得更多的信息。太阳同步轨道倾角与轨道高度的关系由下式确定:

式中:Re——地球半径;
h——轨道高度。
太阳同步轨道意味着太阳与轨道平面有相对固定的几何关系。以地球球心为原点的天球坐标中,太阳随时间(以天计算)相对于轨道面地入射角为:

式中:i——轨道倾角;
ε——黄赤交角;
t0——降交点地方时;
Δα——赤经差。
式中可以得出太阳与轨道面的入射角在一年中有季节性的变化,在一天中变化较小。
遥感器本体近似为立方体,其各个面名称定义为:遥感器本体飞行方向为+X面;遥感器本体对地面为+Z面;按照右手定则得到+Y面,与+X面、+Y面及+Z面分别对应的面为-X面、-Y面及-Z面。
在遥感器的坐标系中,遥感器各面外法线方向余弦为(cosαj;cosβj;cosγj),太阳辐射角系数为:
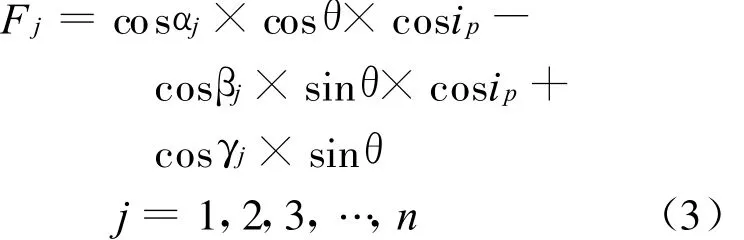
式中:θ——遥感器到会日点的地心角距;
ip——太阳对轨道面的入射角,太阳辐射周期平均角系数为:

星载遥感器外表面任一微元dA上所受的太阳辐射外热流为:

式中:F——太阳辐射角系数; S——太阳常数;
αt——太阳吸收率,与表面性质有关。
低温工况取夏至时的外热流,太阳常数为S=1 320 W/m2,遥感器顶板温度取0℃;
高温工况取冬至时的外热流,太阳常数为S=1 399 W/m2,高温末期工况取冬至时的外热流并考虑涂层退化的影响,在遥感器顶板温度取30℃。
计算中采用的热分析软件为I-DEAS/TMG。按照节点网络法进行建模。节点的能量平衡方程为:
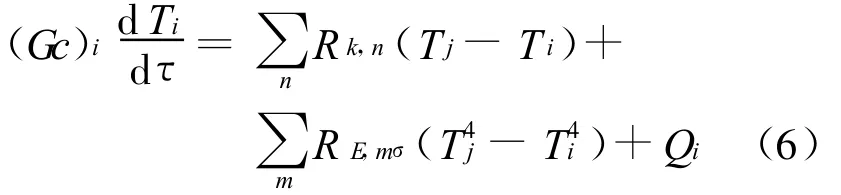
式中:G——节点质量,kg;
c——比热,kJ/(kg◦℃);
T——绝对温度,K;
τ——时间,s;
Rk,RE——分别为热网络的传导和辐射系数;
Qi——总的内、外热流量,W。
首先计算遥感器在轨道上运行时各个方向的外热流。6个方向单位面积上到达的平均外热流如图1所示。

图1 高温工况下各表面到达外热流
从外热流的图形可以看出:
1)星载遥感器各面到达外热流数据变化不大,变化趋势大致相同。
2)遥感器+Y面和+Z面由于受太阳到达外热流变化比较平稳,数值比较小,而+X面和-X面变化较为剧烈。
2 热设计
星载遥感器精密热设计从系统工程出发,针对系统整个寿命周期及全部热环境提出热控方案。根据空间外热流的分布特点,结合内热源的大小和工作模式,采取了被动热控制措施和主动热控制措施。被动热控主要是为了拉平星载遥感器的温度水平,主动热控主要是为了控制星载遥感器的温度梯度。
1)在星载遥感器的主体蒙皮表面包覆多层隔热组件MLI,可以有效地和瞬变的外热流及冷黑空间隔离,减小热量散失和太阳直接辐射等对其产生的影响。
2)遥感器框架表面、光阑等部位均喷涂消杂光黑漆(ε≥0.9),以利于遥感器内部温度均匀化。
3)在星载遥感器的光学镜体安装处的结构或与之相连的部件均设置温度补偿措施,以保证温度水平和温度梯度在要求的范围内。
4)遥感器通过3个支座与卫星本体连接,支座与固定的螺钉均采用TC4材料,支座底部垫有8 mm厚聚酰亚胺(λ=0.16 W/(m◦K))隔热垫板,隔离遥感器与星体间热交换。
5)CCD组件作为星载遥感器的核心部件,为了疏导CCD焦面工作时产生的热量,防止温度过高产生的热应力集中,以及对相邻光学元件的影响,采取如下热控措施:
①热疏导。通过传热通道将CCD焦平面工作时产生的热量传导至外部辐射冷板,再由辐射冷板散失到冷黑空间。
②填充导热胶。在热量传递路径上的安装面填充导热硅胶,降低整个导热路径的热阻,提高传热效果。
③热隔离。在与CCD焦平面相邻的成像电路组件表面粘贴多层隔热组件(MLI),减小CCD焦平面工作时对成像电路组件的影响。
④热控涂层。在CCD焦平面基板,遥感器内框架表面喷涂消杂光黑漆。
3 热仿真分析
对遥感器在空间环境条件下的热平衡状态进行分析,旨在考核热控设计方案的有效性与正确性。统筹考虑与卫星平台的安装点温度,轨道周期等具有相互热作用的构件。载荷工况主要考虑受到的外热流状况影响。工程分析中外热流计算和稳态温度场计算均采用I-DEAS/TMG软件计算[7-8]。
3.1 热传递原理
3.1.1 热传导
热传导可以定义为完全接触的两个物体之间或一个物体的不同部分之间由于温度梯度而引起的内能的交换。热传导遵循傅里叶定律:

式中:q″——热流密度,W/m2;
k——导热系数,W/m◦℃;
“-”——热量流向温度降低的方向。
3.1.2 热对流
热对流是指固体的表面与它周围接触的流体之间,由于温差的存在引起的热量交换。热对流可以分为两类:自然对流和强制对流。热对流用牛顿冷却方程来描述:

式中:h——对流换热系数(或称膜传热系数、给热系数、膜系数等);
TS——固体表面的温度;
TB——周围流体的温度。
3.1.3 热辐射
热辐射指物体发射电磁能,并被其它物体吸收转变为热的热量交换过程。物体温度越高,单位时间辐射的热量越多。热传导和热对流都需要有传热介质,而热辐射无须任何介质。实质上,在真空中的热辐射效率最高。
3.2 热仿真计算模型
仿真分析采用有限元法进行,有限元模型的划分遵循几何等效和热等效的原则,既考虑到有限元模型与实际结构的几何相似,又在热容等效的前提下进行模型简化,同时考虑到不同材料的热惯性,以正确反映热量的传递。利用I-DES/ TMG软件的partition功能,将遥感器几何实体复杂的拓扑结构通过附加线、面划分成相对简单的拓扑构形,逐一进行网格划分,共5 736个节点和4 865个单元。
3.3 热控指标
遥感器由地面到入轨过程以及在轨运行期间,所处热环境发生巨大变化,遥感器自身的热状态也不断发生变化,在热弹性作用下使光学镜头的表面形状、相对位置发生变化,导致光学系统视轴(LOS)漂移及波前差(WFE)变化,使成像质量变坏,甚至根本无法成像;同时,由于CCD焦面受到环境温度变化的影响,会产生热噪声、暗电流,使成像质量降低;电控系统会由于温度过高而失效。为完成遥感器在轨工作任务,必须保障遥感器热光学要求,确保光学系统在空间热环境作用下所引起的视轴(LOS)漂移及波前差(WFE)变化在许用范围之内,满足遥感器光学系统总的热光学指标。温度范围:(20±5)℃;轴向温差:≤3℃;周向温差:≤2℃。
3.4 稳态计算
轨道参数设置如下:太阳同步运行轨道;轨道高度为642 km;轨道倾角为96.8°;降交点地方时10:10;低温工况取夏至时的外热流 β角为-19.66°,S1=1 320 W/m2;高温工况取冬至时外热流,β角为-25.43°,S2=1 412 W/m2。
低温工况:卫星平台的温度为-10℃,星载遥感器内部单元全不工作,内热源为零的情况下,主动热控功耗84 W,多层隔热组件表面太阳吸收率取0.20,取最小β角。
高温工况:卫星平台的温度为20℃,星载遥感器单元全部工作,内热源最大的情况下,主动热控功耗68 W,多层隔热组件表面太阳吸收率取0.38,取最大β角。
星载遥感器本体在高、低工况的温度分布分别见表1和表2。

表1 低温工况遥感器本体温度数据统计表 ℃
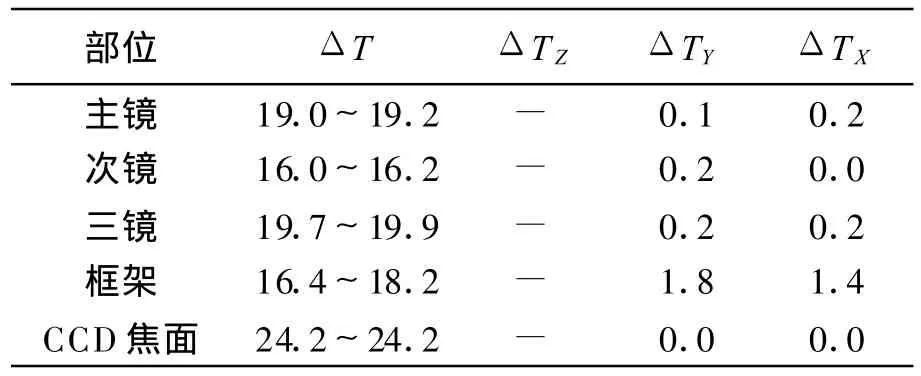
表2 高温工况遥感器本体温度数据统计表 ℃
温度整体上在18.9~24.2℃之间,其温度水平处于可控状态,主镜、次镜、三镜、调焦镜4个光学元件的温度在19.4~20.5℃之间,单个镜体的最大温差为0.4℃。星载遥感器本体的温度满足(20±5)℃的温度水平要求,其周向和轴向温差均满足设计要求。
3.5 瞬态计算
对于瞬变内部功耗,按照遥感器每周期内不同工作模式对应的持续时间和功耗进行赋值;瞬变外热流按照实际情况设定边界条件;主镜温度基本维持在19.5℃附近,波动较小,主镜瞬态计算结果如图2所示。
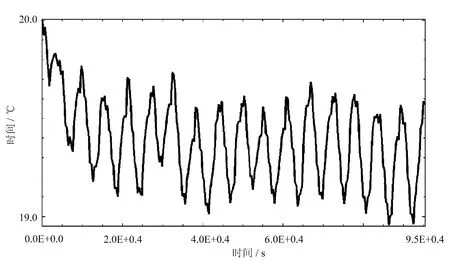
图2 主镜的瞬态温变图
4 试验验证
为验证热分析模型的正确性,同时考核热控设计的有效性,根据航天规范要求进行了热平衡试验。试验在热真空环境模拟器内进行,在调焦机构周围通过粘贴加热片和利用红外加热笼热辐射的方式来模拟轨道热环境。真空度<1.3× 10-3Pa,热沉温度控制在100 K以下,模拟轨道的真空环境和冷黑环境。试验分为高温、低温工况两个阶段进行。
恒定外热流试验工况稳定的判据是当检测点的温度变化符合下列条件之一者,则认为试验工况达到稳定:在连续 4 h内,波动值不超过±0.5℃;在连续 4 h内,单调变化值小于0.1℃/h。
遥感器共设置了10个温度采集点,各工况平衡状态温度结果如图3所示。
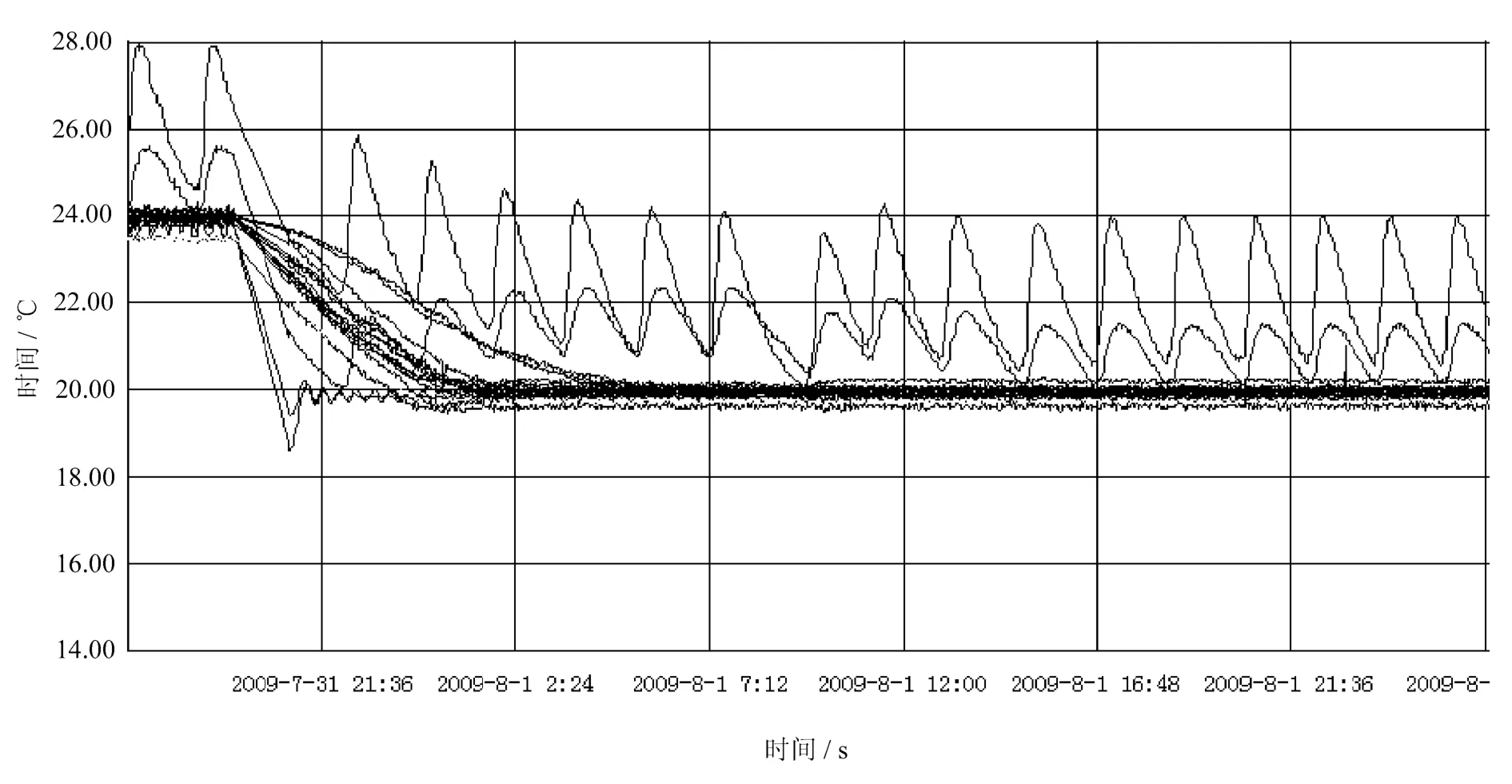
图3 遥感器平衡状态下温度测点曲线
试验结果显示结构在极端工况条件下最大温差<4℃,试验结果的各个工况的平衡温度与分析结果一致,充分说明了热分析结果的正确性。
5 结 语
针对太阳同步轨道星载遥感器结构特点和复杂多变的外热流分布所带来的热控制难度,提出了适应该特点的热设计和仿真分析。仿真分析结果表明,通过合理的热量补偿方式,控制遥感器温度分布和温度水平,使其满足温控指标要求。经过极端工况热平衡试验,验证了遥感器精密热控设计的有效性和正确性。所采用的热控措施技术成熟、可操作性高、满足设计约束条件的要求。星载遥感器的热设计和仿真分析试验验证提高了可信度,缩短了时间,降低了费用。该计算方法同样适用于其它类型的遥感器,具有通用价值。
[1] 闵桂荣.遥感器热控制技术[M].北京:宇航出版社,1991.
[2] Glmored G.Spacecraft thermal control handbook [M].Second Edition.Houston:The Aerospace Press,2002.
[3] 吴雪峰,丁亚林,吴清文.临近空间光学遥感器热设计[J].光学精密工程,2010,18(5):1159-1165.
[4] Vaughan R E,Gilbert J A.Analysis of graphite reinforced cementitious composites[C]//Proceedings of the 2001 SEM Annual Conference and Exposition.Portland:OR,June,2001(4/6):532-535.
[5] 黎明,吴清文,江帆,等.三线阵立体测绘遥感器热控系统的设计[J].光学精密工程,2010,18(6): 1367-1373.
[6] 王永宪,王兵,任建岳.空间遥感器碳纤维支撑结构改进及拓扑优化设计[J].红外与激光工程,2009,38(4):702-704.
[7] 薛军,孙宝玉,吴澜涛,等.空间相机CCD电箱热分析计算[J].长春工业大学学报:自然科学版,2008,29(2):212-216.
[8] 辛宏伟,董得义.长焦距空间遥感器支撑结构设计研究[J].光机电信息,2009,26(10):28-33.
