基于频谱分析的运动模糊图像的参数鉴别
2011-03-20苏军
苏军
(南京航空航天大学计算机科学与技术学院,江苏南京210016)
在获取数字图像的过程中,由于设备或操作者的原因,易造成运动模糊,这是一种常见的降晰过程。如果在曝光瞬间,相机镜头和对象之间有相对运动,那么拍摄到的图像便是运动模糊图像。运动造成图像模糊的过程实质就是对原始图像进行多点平滑的过程,也就是一个像素与运动方向上的周围像素进行累加平均的过程,即模糊图像某一位置上的原像素值已经不是原来的值,因此观测图像往往在某一方向上有模糊的重影[1]。
建立图像复原模型的关键是确定运动模糊系统的两个重要参数[2]:一是运动模糊的方向θ;二是运动模糊的长度L。文中主要通过对运动模糊图像做频谱预处理,对频谱实施Radon变换确定运动模糊的方向θ,进而计算出运动模糊的尺度L。试验结果证明这种参数估计的方法准确,模糊图像复原效果良好。
1 运动模糊图像的退化模型
一般来说,图像的退化过程可以用以下的模型表示。

图1 图像退化模型
模型中h(x,y)和g(x,y)分别表示理想的图像和降质图像;则h(x,y)表示退化函数;n(x,y)表示各种噪音的集合,主要是指加性噪声。
因此,图像的降质现象可以用理想图像与点扩散函数的卷积过程来描述,公式表示如式(1)所示

由于曝光时间短,在这段时间内的相对运动可近似认为是匀速直线运动。因此观测图像往往在某一方向上有模糊的重影,这就为重建模糊模型提供了依据。
假设模糊图像的运动方向与x正轴成θ角度,运动距离为L像素,点扩展函数可以看作沿着x正轴旋转了θ角[3],表达式如下
其中,x、y取值范围是

由上式(2)可知得,确定模型的关键在于准确的得出模糊尺度L和模糊角度θ。
2 运动模糊图像的参数估计
当目标图像和背景发生相对运动时,运动的方向可在倒频谱中体现出来[4]。由式(2)可得,点扩散函数的傅里叶变换表示为

其中w=ucos(θ)+vsin(θ),H(u,v)是个正弦函数,其零值发生在w=±1/L,±2/L,±3/L,…。
在忽略噪音的情况下,对式(1)做傅立叶变换,可得

因此,H(u,v)的零点也是G(u,v)的零点。
2.1 频谱中的方向特征
如果引起图像退化的点扩散函数具有零点,这些零点就会迫使退化图像的频谱在这些特点的频域上变为零。这将导致模糊图像的频谱也会在某些频谱上出现零点,表现在频谱上就会出现一系列暗线。根据上面得到的零点位置,可知运动模糊图像在频域上表现为一些垂直的等间距直线。
直接观察运动模糊图像的视觉效果差,因此为了精确提取出运动模糊图像的有效信息,采用Canny算子进行频谱图边缘检测,阈值的选取也直接影响频谱中方向的检测精度,选取阈值范围0.05~0.015。
Radon变换可以实现在某一特定方向上进行灰度累加,因此可以根据在一个[-90°,90°]的角度范围内求累加值,假设最大的累加值对应的角度是θ°,那么运动模糊的角度为θ-90°。
图2(a)中亮纹的走向验证了Randon变换。其中模糊尺度L是10像素,模糊角度θ=60°。
2.2 频谱中的长度特征
文献[5]中从理论上分析了模糊距离的频谱特点,即图像实际运动的距离与频谱图中暗线的数目有关,因此可以利用它来估计运动模糊长度。

图2 运动模糊图像
为便于直接观察图像频谱中的平行条纹,对频谱进行对数变换,对数变换的目的就是将原图像的频谱进行灰度压缩,使图像的条纹更加清晰,而其条纹间距不变。同时注意,由于对数变换的原因,应将式(4)中的零点替换为很小的正数。
考虑到Radon变换[6]的特点,可以使用求得的模糊角度θ,得到频谱在方向θ上的投影向量。频谱中心是低频部分,因此这个投影向量也会以中心为轴,两边对称分布,中间最宽的部分可看作两边的叠加,是两个峰值的叠加。如图3所示,模糊尺度L是10像素,模糊角度θ是60°的投影图,峰值的个数正好与模糊长度相等。
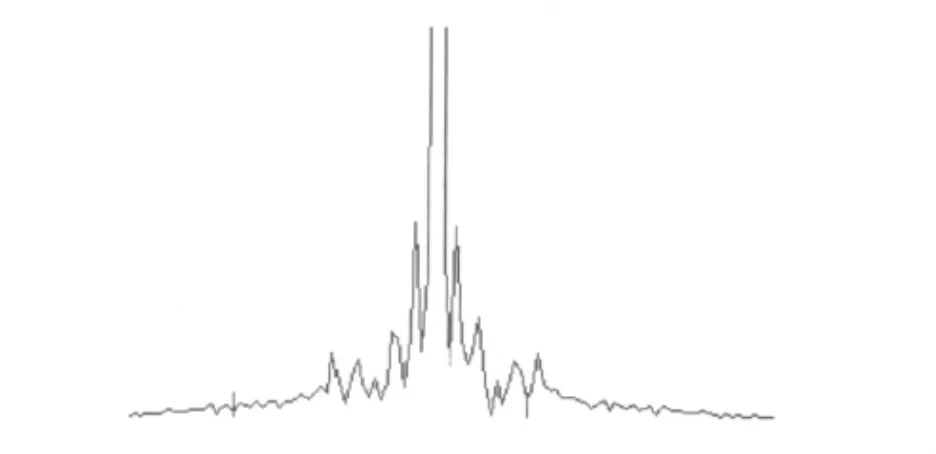
图3 方向上的Radon投影图
这里对于同一幅图像,只要模糊长度确定,任意的模糊角度,得到的Radon变换投影图都是相似的。
3 模糊参数的验证结果与分析
采用上述方法验证了本算法的有效性和适用性。针对仿真的和实际拍摄的模糊图像,应用本文提出的估计方法所鉴别出运动模糊参数,并用经典的维纳滤波复原运动模糊图像。
(1)仿真运动模糊图像,参数:L=17像素;θ=25°;方差为0.01的高斯噪声。鉴别出参数是L=17像素,θ=23°。复原效果如图4所示。
(2)实拍的运动模糊图像,应用提出的方法鉴别出模糊参数:L=10像素;θ=42°。复原效果如图5所示。

图4 仿真图像验证

图5 实拍图像验证
运动模糊图像经维纳滤波复原后的效果,也进一步证实了提出的求解方法。
4 结束语
提出了在频域中应用频谱特点,研究运动模糊图像的点扩散函数参数的估计问题。结合Radon的数学特性鉴别出模糊参数,并给出了具体步骤。实验结果表明,根据PSF的模型参数进行维纳滤波复原验证了该方法的准确性。该算法具有易于理解和操作,适用性较广的优点,具有一定的研究价值。
[1] LOK HANDE R,ARYA K V.Identification of parameters and restoration of motion blurred images[J].Chinese Journal of Computers,2007,30(4):686-692.
[2] YITZTMKY Y,KOPEIKA N.SIdentification of blur parameters from motion blurred images[J].Graphical Models and Image Processing,1997,59(5):310-320.
[3] 孙兆林.Matlab 6.x图像处理[M].北京:清华大学出版社,2002.
[4] CANNON M.Blind deconvolution of spatially invariant image blurs with phase[J].IEEE Trans.Acoust.Speech Signal Process,1976,ASSP-24(1):56-63.
[5] 郭永彩,郭瑞瑞.运动模糊图像点扩展函数的参数鉴别[J].仪器仪表学报,2010,5(31):1052-1057.
[6] FABIAN R,MALAH D.Robust identification of motion and out-of-focus blur parameters from blurred and noisy images[J].CVGIP:Graphical,Models and Linage Processing,1991(53):403-412.
