基于卫星云图的云分类研究
2011-03-14刘扬王彬韩雷
刘扬,王彬,韩雷
(1.中国海洋大学信息科学与工程学院,山东青岛266100;2.国家气象信息中心计算机室,北京100081)
各种类型云的辐射特性以及其分布情况,很大程度上影响着天气预报的准确性、气候监测的有效性和全球气候变化等。但由于云的复杂多样性,如何准确地对卫星云图进行自动分类,仍是目前研究的热点问题。
利用卫星提供的图像数据进行云分类一般都要经过3个步骤:数据预处理、特征提取和选择、分类。早期简单的云分类方法是基于图像的阈值方法[1],而随着卫星相关技术以及云图质量的提高,采用聚类的分类方法得以广泛研究和应用,到80年代中后期结合神经网络方法[2-3]进行云分类的研究也开始兴起。近些年的云分类研究则是在现有成熟理论基础上加以改进,针对具体卫星云图,将多种方法的优点相结合[4],使分类的结果更准确合理。
本文结合近几十年国内外的卫星云图云分类研究的发展情况,主要关注两个方面:一是特征提取和选择的方法;二是分类的方法。并简要介绍了对分类结果的评价方法。
1 特征提取和选择
1.1 特征集构成
最常用的特征是光谱特征和纹理特征。光谱特征提取的是云在不同波段的辐射信息,如云顶亮温、可见光反照率等。这对区分不同高度的云至关重要,在可见光图像上亮度低的为低薄云,亮度高的是高冷云,而红外图像则相反。但是只用光谱特征的分类结果正确率并不高,因此也要结合云图的纹理特征进行分析。纹理特征是指图像某个区域相关的灰度级空间分布特征。一般通过灰度共生矩阵、灰度级差矩阵以及和差直方图得到的统计数据组成纹理特征。
1.2 特征提取和选择
卫星资料所含的数据相当庞大,且含有一定冗余信息。采用适当的特征提取和选择的方法可以从复杂的云系统特征空间中选择出最有效的几个特征,从而可以提高分类的运算速度。常用的统计特征提取选择算法有奇异值分解(Singular Value Decomposition,SVD)、小波包、独立成分分析(Independent Component Analysis,ICA)等等。
SVD提供图像的能量信息,并且提供图像子空间上能量分布的信息Tian等人在中使用奇异值分解进行云类的特征提取[3]。如图1所示,分别对四种类型的云截取8×8像素的块图(左),各自进行奇异值分解(右)。最大奇异值表示图像均值,其基本体现图像的光谱特征,其余的奇异值表示图像的细节信息。Rashpal等人利用SVD方法[5]提取可见光和红外图像雪与云数据引起的显著光谱和纹理特征。而Azimi-Sadjadi则介绍了一种运动奇异值分解(MSVD)方法[6],用来确保时域更新算法分类的准确性。

图1 一些典型8×8像素云块图(左)以及各自SVD取对数后的值分布(右)Fig.1Some typical 8×8 blocks(left)and their corresponding SDV values in log domain(right)
二维小波分解能很好地反应图像的时频特征,分解的子图像能提供原图像在不同频带信息。分解的层数越高,频率分辨率越高,相应时间分辨率降低。Tian等人同样也采用二维Haar小波包对卫星云图进行3层分解来提取特征[3]。在都使用概率神经网络分类方法的条件下,对比了SVD和小波包(Wavelet Packets,WP)2种特征提取方法。使用WP进行特征提取在整体分类准确率上不如奇异值分解,而从具体类别来看,特征值分解对于提取高层云、卷层云、层积云和非云区的特征较好,而WP对提取卷云特征较好。
2 常用云分类方法
2.1 无监督分类方法
常用的无监督云分类方法可分为阈值法、直方图法、聚类法等。聚类方法是目前最常用的无监督云分类方法,具有以下3个特点:1)选定某种距离度量作为样本间的相似性度量。2)确定某个评价聚类结果质量的准则函数。3)给定某个初始分类,然后用迭代算法找出使准则函数取极值的最好分类结果。Z.Ameur等人使用C-均值聚类方法进行云分类[7],分别从Meteosat卫星图像的0°、45°、90°、135°4个方向获得纹理特征,利用K-均值聚类进行图像分割。Ameur等人则采用所谓的标准差限的适应聚类(Standard Deviation Limited Adaptive Clustering,SDLAC)算法[8],对GOES-12、MSG-SEVIRI和MODIS卫星图像进行分类。SDLAC是在迭代过程中对标准差阈值和聚类中心的调节,当聚类中心和阈值满足要求时,就产生新的类别。王继光等人则是对传统单一分类方法的改进,该方法综合了遗传算法(Genetic Algorithm,GA)、模糊C-均值聚类和模糊减法聚类[4]。GA最大的特点是基于全局的随机搜索,迭代过程能避免陷入局部最优,因此和聚类方法优缺点互补。
2.2 有监督分类方法
常用的有监督云分类方法有近邻法、最大似然估计法(Maximum Likelihood Estimate,MLE)、支持向量机(Support Vector Machines,SVM)等。Azimi-Sadjadi等人运用一种等级结构的SVM云分类方法,对GOES8卫星的红外通道数据用SVD方法提取特征,将图像划分为10类[9]。整个分类系统由9个两类SVM分类器构成,分类结构图如图2所示。其中对暖陆地、冷陆地和暖水域分类准确率达90%以上;对于高云如密卷云和卷层云以及低云中的层积云分类结果较为理想,整个系统的分类准确率在78.5%左右,如果更好地利用可见光信息,准确率会有所提高。
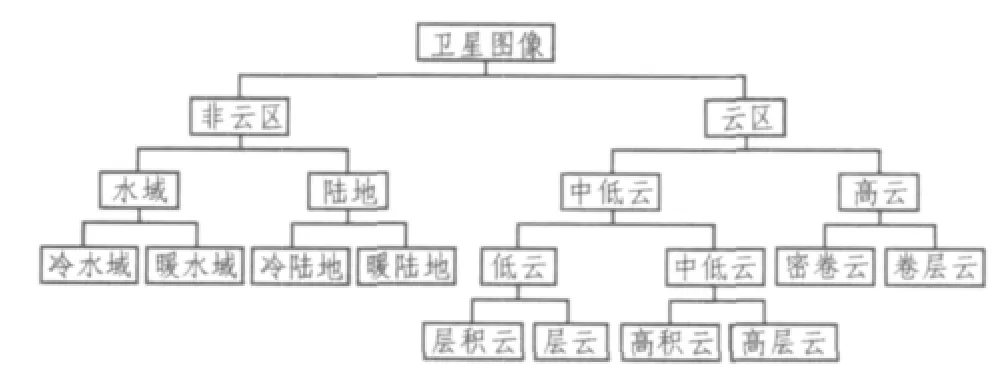
图2 卫星云图分类结构图Fig.2Structure chart of cloud classification
2.3 神经网络分类方法
随着人工神经网络技术的发展,使用神经网络对卫星图像云分类的研究也有不少进展。常用于云分类的神经网络主要有BP神经网络、概率神经网络(Probabilistic Neural Network,PNN)和自组织映射(Self Organizing Feature Maps,SOM)网络。
2.3.1 BP神经网络
BP神经网络即反馈神经网络,一般由输入层、隐含层和输出层构成。输入层输入的是样本特征矩阵,输出层输出的是样本分类类别。网络训练经过两个过程。前向传播是信号由输入层单元传到隐层单元,经隐层单元逐层处理后再送到输出层单元,由输出层单元处理后产生一个输出模式,这是一个逐层状态更新的过程。若输出与期望输出模式有误差且误差不满足要求时,误差转入后向传播过程,将误差值沿连接通路逐层传送并修正各层连接权值。
Welch等人用BP神经网络将AVHRR-LAC数据图像分成10类[2]。网络结果是20-55-55-10,其中20表示输入的特征空间的维数。采用bootstrap方法获得分类的整体正确率为87.6%。师春香等人介绍了利用BP神经网络对NOAAAVHRR卫星图像进行云分类[10]。网络采用20-40-15-4结构的BP神经网络,其中输入层神经元个数是特征空间的维数,输出层神经元个数表示看了8种类别。对大量样本进行训练和验证后,分类的整体正确率有78%以上。
2.3.2 概率神经网络(PNN)
PNN网络也是由3层组成,其中输入层也是输入样本特征空间矩阵,隐含层主要有两个作用,一个是根据样本构成概率密度函数p(cj|x|)估计,二是根据概率密度函数构成贝叶斯风险函数,输出层根据贝叶斯估计准侧,做出判别。
Tian等人也利用PNN网络对GOES-8数据进行分类[3],分类整体准确率有83.4%—83.8%,但是对于中层云与底层云的分类准确率不高。Bankert等人采用PNN网络对AVHRR数据按16×16像素的块处理[11],将图像划分为10类,分别采用hold-one-out和bootstrap方法来获得分类器理论准确率分别是79.8%和77.1%。
2.3.3 SOM网络
SOM网络主要算法是一种无监督的聚类方法,将任意输入模式在输入层映射成一维或二维离散图形,并保持其拓扑结构不变。在竞争层对输入模式的反复自组织学习,得到分类结果表示出来。
LIU Yu等人认为相比FY-2C目前使用的窗口聚类算法,SOM方法用于分类效果更好[12]。FY-2C现有的云分类产品是利用红外通道的数据检测云,使用水汽通道的亮温梯度区分出高层云,使用32×32像素块作为分类基本单元并使用聚类方法分类。分类结果表明,SOM方法不仅从像素级别上极大地改进分类结果,也能够准确的将云团分类成积雨云、卷云和高层云。
3 分类结果评判及方法比较
云分类研究因应用目的的不同而有很大差异,对于各种分类结果的评判主要有两种手段:一种是根据气象专家人工评判分类结果;另一种则是根据统计的方法来计算分类的理论准确率,如交叉验证hold-one-out[11]和bootstrap[2,11]方法。前者是通过对比专家标记过的云图来进行评判,后者则是通过对训练样本采用一定的方法重采样构成样本子集,对形成的分类器再次进行测试,得出最优结果的分类准确率。这种方法由于不能包括所有云类型情况并且计算量大,所以存在一定误差,因此对分类结果的评价目前仍多以人工评价为主[13-14]。由于运用不同的卫星数据、不同的特征、不同种类和数量的类型原因等,很难定量比较分类方法的优劣,但是对各种分类方法进行定性比较不仅有利于方法的改进,还有助于在遥感业务上的应用。现有的云分类研究中,有对一些分类方法进行比较的工作,得出了各方法的特点。文献[3]是通过验证GOES-8数据,比较了PNN和SOM这两种神经网络的分类方法。如图3所示,(a)是作为分类结果的参照标准,(b)是同一场景使用PNN训练样本所得的分类结果,(c)是使用SOM网络训练得到的分类结果,文献中指出使用PNN分类的统计正确率相对使用SOM网络分类的正确率要高,但是SOM的网络训练时间相对要短很多,而且分类后的云团边界要比使用PNN分类的云边缘更光滑。

图3 使用PNN和SOM分类结果图Fig.3Classification comparison chart using PNN and SOM
4 结论
综上所述,使用卫星图像进行云分类识别,是遥感图像领域的热点和难点。对卫星云图进行分类核心问题是特征提取和选择,以及分类器的设计。前者是影响分类结果的关键因素,后者是决定最终分类性能的重要环节。
现有的云分类研究,是针对某个地区或一些特定的云型设计的,由于各方法所用的卫星数据、提取和选择的特征、涉及云的类型不同等原因,各分类器有各自的特点。而今后多种分类方法的结合、多种卫星资料的结合也是这一研究领域的发展方向。
[1]Desbois M,Seze G,Szejwach G.Automatic classification of cloudsonMETEOSATimagery[J].JournalofApplied Meteorology,1981,3(21):401-412.
[2]WelchRM,Sengupta SK,GorochAK.Polarcloud and surface classification using AVHRR imagery:an intercomparison of methods[J].Journal of Applied Meteorology,1992,5(31):405-421.
[3]Tian B,Shaikh M A,Azimi-Sadjadi M R,et al.A study of cloud classi cation with neural networks using spectral and textural features[J].IEEE transactions on neural networks,1999,1(10):138-151.
[4]王继光,张韧,洪梅,等.卫星云图云分类的一种综合优化聚类方法[J].解放军理工大学学报:自然科学版,2005,6(6):585-590.WANG Ji-guang,ZHANG Ren,HONG Mei,et al.Synthetical optimization clustering method for classifying cloud from satellite images[J].Journal of PLA University of Science and Technology:natural science edition,2005,6(6):585-590.
[5]Rashpal K,Ganju A.Cloud classification in NOAA/AVHRR imageries using spectral and textural features[J].Journal of The Indian Society of Remote Sensing,2008,36(2):167-174.
[6]Azimi-Sadjadi M R,GAO Wen-feng,Haar T V,etc.Temporal updating scheme for PNN with application to satellite cloud classification-further results[J].IEEE transactions on neural networks,2001(12):1196-1203.
[7]Ameur Z,Ameur S,Adane A,et al.Cloud classi cation using the textural features of Meteosat images[J].Remote Sensing,2004,25(4):4491-4503.
[8]Berendes T A,Mecikalski J R,MacKenzie Jr.W M,et al.Convective cloud identification and classification in daytime satellite imagery using standard deviation limited adaptive clustering[J].Journal of Geophysical Research,2008,113(20):1-9.
[9]Azimi-Sadjadi M R,Zekavat S R.Cloud Classification Using Support Vector Machines[C]//Geosicience and Remote Sensing Symposium,USA:IEEE,2000(2):669-671.
[10]师春香,瞿建华.用神经网络方法对NOAA-AVHRR资料进行云客观分类[J].气象学报,2002,60(2):250-255.SHI Chun-xiang,QU Jian-hua.Cloud classification for NOAA-AVHRR data by using a neural network[J].Acta Meteorologica Sinica,2002,60(2):250-255.
[11]Bankert R L.Cloud classification of AVHRR imagery in maritime regions using a probabilistic neural network[J].Journal of Applied Meteorology,1994,33(8):909-918.
[12]LIU Yu,XIA Jun,SHI Chun-xiang,et al.An improved cloudclassificationalgorithmforchinaFY-2Cmultichannel images using artificial neural network[J].Sensors,2009,9(7):5558-5579.
[13]Berendes T A,Kuo K S,Logar A M,et al.A comparison of paired histogram,maximum likelihood,class elimination,and neural network approaches for daylight global cloud classificationusingAVHRR imagery[J].Journal of Geophysical Research,1999,104(6):6199-6213.
[14]师春香,吴蓉璋,项续康.多阈值和神经网络卫星云图云系自动分割试验[J].应用气象学报,2001,12(1):70-78.SHI Chun-xiang,WU Rong-zhang,XIANG Xu-kang.Automatic segmentation of satellite image using hierarchical threshold and beural network[J].Quarterly Journal of Applied Meteorology,2001,12(1):70-78.