前三体船概念及其阻力和运动性能试验研究
2011-03-06贾敬蓓张文鹏
贾敬蓓 宗 智 张文鹏
1大连海洋大学 海洋工程学院,辽宁 大连 116023 2大连理工大学工业装备结构分析国家重点实验室运载工程与力学学部船舶工程学院,辽宁大连 116024
前三体船概念及其阻力和运动性能试验研究
贾敬蓓1宗 智2张文鹏2
1大连海洋大学 海洋工程学院,辽宁 大连 116023 2大连理工大学工业装备结构分析国家重点实验室运载工程与力学学部船舶工程学院,辽宁大连 116024
采用模型试验方法研究了三体船侧体的纵向位置变化对三体船阻力性能和运动性能的影响。模型试验包括三体船在静水中的阻力试验和在规则波中的运动试验两部分。实验结果表明,三体船侧体的纵向位置对三体船阻力和运动性能的影响显著;在高航速段,将侧体的纵向位置选取在主体舯前位置,能明显改善三体船的阻力性能和运动性能。基于此,提出前三体船的概念。
前三体船;阻力性能;运动性能;模型试验
1 引言
与常规排水型单体船相比,高速三体船具有甲板面积宽、快速性好、耐波性优、稳性好、抗沉性高、生存能力强、改装余地大等优点,是一种在军用、民用市场均有广阔应用前景的新船型。
自20世纪70年代起,三体船逐渐受到世界各国研究人员的关注[1],有关三体船阻力和运动性能方面的研究也成为热点,其研究方法主要有理论分析、船模试验和数值计算。其中,船模试验因其结果的可靠性而备受人们关注,但因船模试验的费用高且耗时,因此,目前有关三体船船模试验的数据和资料并不多。近来,国际上在三体船阻力和运动性能方面进行了大量试验研究。Ackers等[2]进行了大量的三体船模型阻力试验,并通过试验结果论述了三体船侧体的横向纵向位置、对称性、排水量及攻角等对三体船阻力特性的影响。李培勇等[3-4]对圆舭细长船体的三体船模型进行了阻力和运动模型试验。顾敏童等[5]对高速小水线面三体船船型进行了阻力模型试验。Degiuli等[6]对主体和侧体均为Wigley船型的高速三体船进行了阻力模型试验。Se等[7]对主体采用半滑行艇线型的三体船进行了阻力模型试验。何木龙等[8]应用均匀设计法进行了三体船模型试验,并根据试验结果系统地分析了三体船的兴波干扰特性及其阻力性能。郦云等[9]对主体和侧体均为Wigley船型的高速三体船模型进行了阻力试验研究。唐丰等[10]提出了一种新型的三体船型,其主体和侧体具有相同的线型,但主体主尺度小于侧体主尺度,并对这种三体船型的阻力性能进行了模型试验研究。蔡新功等[11]选取一个主体为圆舭船型、侧体为尖舭船型的三体船进行了模型阻力试验。Hebblewhite等[12]通过模型试验研究分析了三体船侧体的纵向位置变化对三体船运动响应的影响。
本文三体船模型的主体和侧体均选取方尾折角线型,通过模型试验研究三体船侧体的不同纵向位置对三体船阻力和运动性能的影响,并依据试验结果,提出“前三体船”的概念。
2 三体船模型试验
2.1 模型设计
三体船模型的主船体选取的是一个方尾折角线型的船体,两个侧体是在主船体的基础上按4∶1的比例缩小后略加修改得到的。主体与侧体之间通过两个平行的木质横梁连接,这样不仅能保证三个片体之间的固定连接,又能方便侧体在横向、纵向位置的移动。三体船模型的横剖面示意图如图1所示,主要船型参数如表1所示。
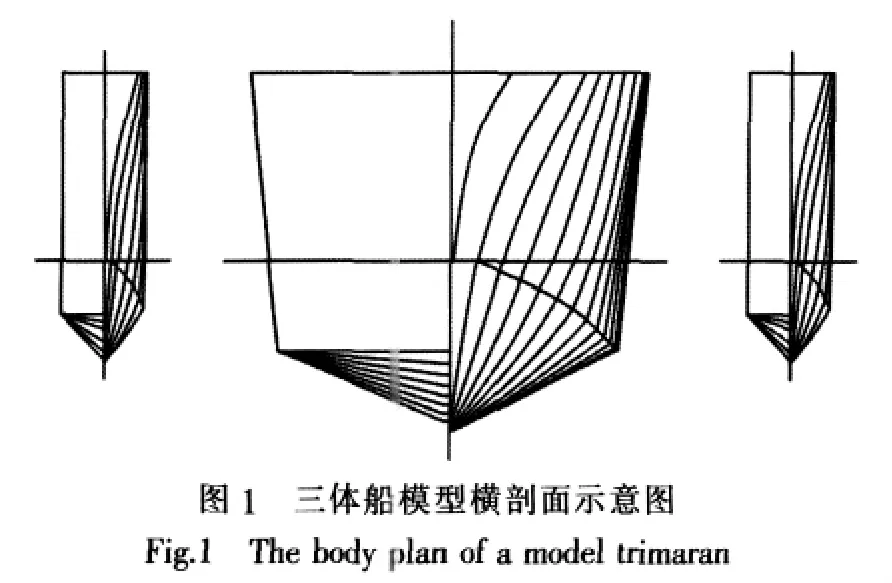
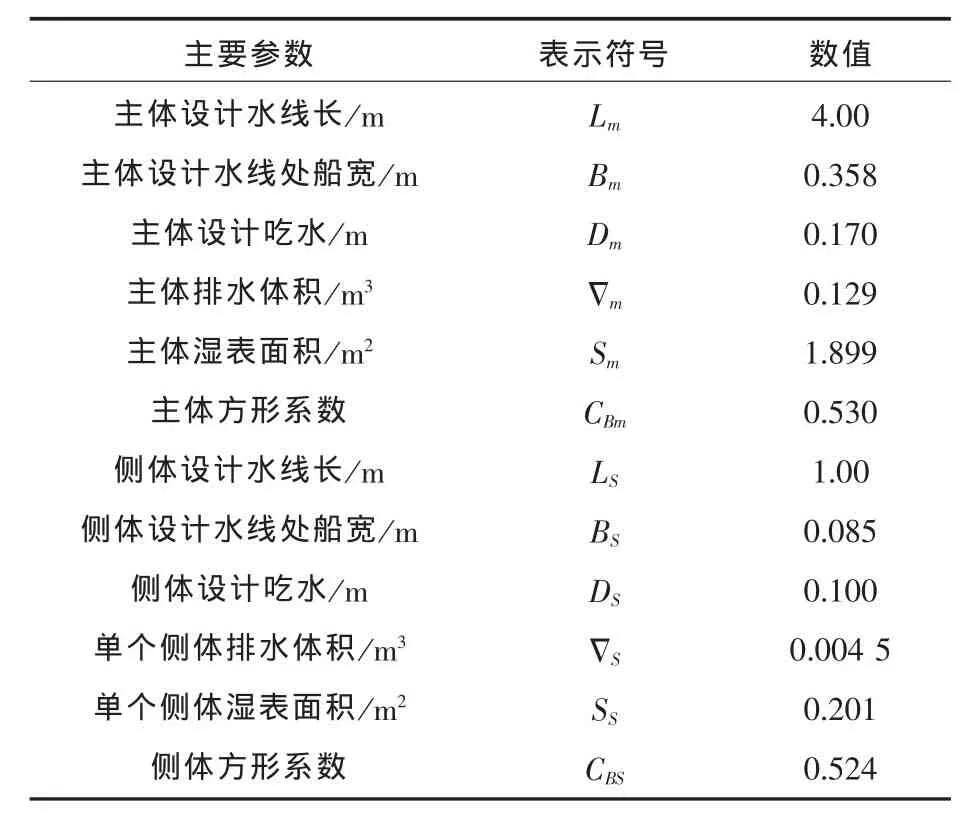
表1 三体船模型的主要船型参数Tab.1 Main particulars of a trimaran model
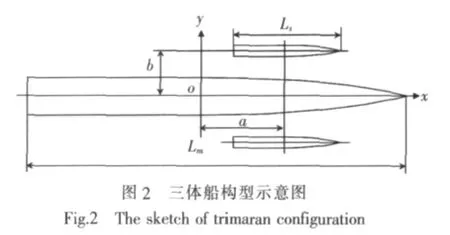
三体船的两个侧体相对于主体有许多不同的摆放位置,这些不同的摆放方式称之为三体船的不同构型。为便于描述主体与侧体之间的相互位置关系,选取了一个直角坐标系。坐标系原点o位于设计水线面上主船体的船中位置,ox轴沿船长方向且指向船首为正,oy轴沿船宽方向且指向左舷为正。示意图中的变量a和b分别表示三体船侧体相对于主体的纵向和横向位置,其中变量a代表侧体船中与主体船中之间的距离,且当侧体船中位于主体船中之前时,a的取值为正;变量b代表侧体中纵剖面与主体中纵剖面之间的距离,b的取值始终为正。三体船模型的构型示意图如图2所示。
2.2 试验方案设计
本文设计的模型试验是将侧体的横向位置保持不变,即设定b=0.7 m,只变换侧体的纵向位置。沿着主体的船长方向,由船尾至舯前共选取了5个不同的侧体纵向位置,并据此设计得到了5种不同的三体船构型,具体参数如表2所示。
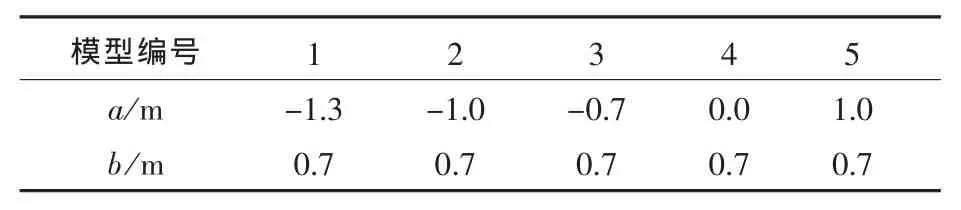
表2 三体船构型参数Tab.2 The parameters of different trimaran configurations
三体船模型试验在大连理工大学船模拖曳水池中进行,该水池长160 m,宽7 m,水深3.7 m。
模型试验共包括两大部分:一是三体船在静水中的阻力试验,其傅汝德数变化范围为Fn=0.1~1.0;二是三体船在规则波中的运动响应试验,具体如表3所示。表中的λ代表规则波波长;β代表浪向角,且β=180°为迎浪。
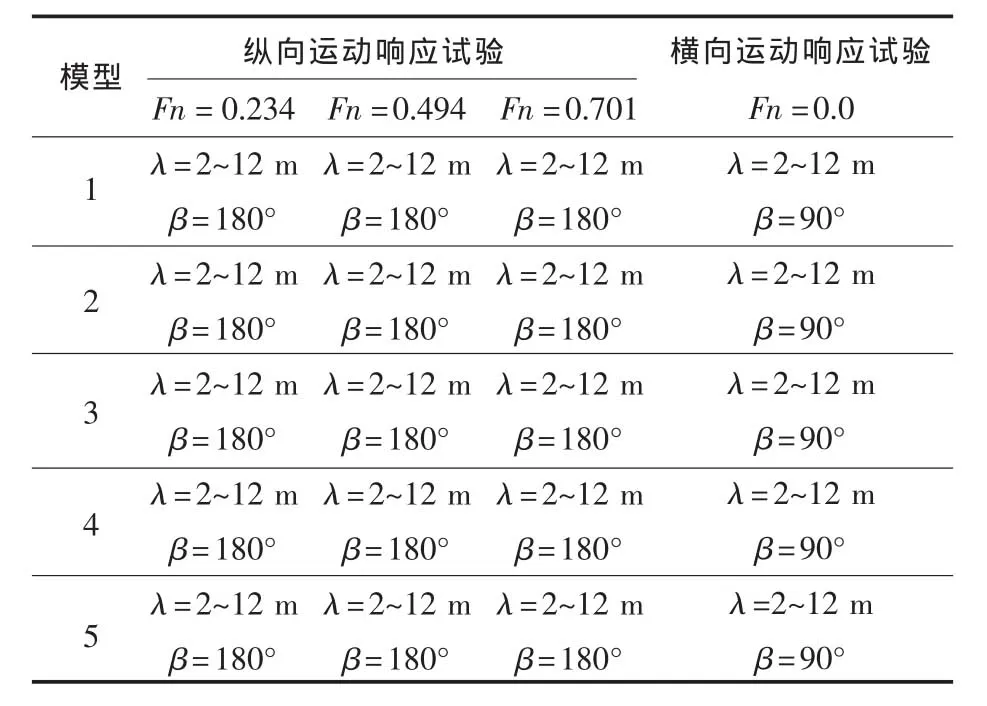
表3 三体船在规则波中的运动试验Tab.3 The trimaran motion tests in regular waves
3 三体船阻力性能
三体船模型在静水中的总阻力试验如图3所示。试验测得的是不同构型三体船的总阻力Rt(单位 N)。
本文采用ITTC-57公式计算摩擦阻力系数:

式中,Cf为摩擦阻力系数;Re为雷诺数,Re=。 其中,V 为 航速,m/s;L 为船长,m;ν 为水的运动粘性系数,m2/s,取ν=1.0× 1 0-6。
三体船的主体和侧体虽具有相同的航速,但其船长却不相同,因而主体和侧体的雷诺数也不相等。所以,必须将主体和侧体的雷诺数及摩擦阻力系数分别进行计算。
根据公式(1),可分别计算得到主体和侧体的摩擦阻力系数,然后再由公式(2)分别计算出主、侧体的摩擦阻力,将三个片体的摩擦阻力叠加在一起,即可得到三体船总的摩擦阻力。

总阻力减去总摩擦阻力即得到三体船的剩余阻力,再由公式(3),即可求得三体船的剩余阻力系数。

式中,Rr为船模的剩余阻力,N;ρ为水的密度,1 000 kg/m3;V 为船模的航速,m/s;S 为船模的湿表面积,m2。
经换算得到的各构型三体船剩余阻力系数随傅汝德数变化的曲线如图4所示。
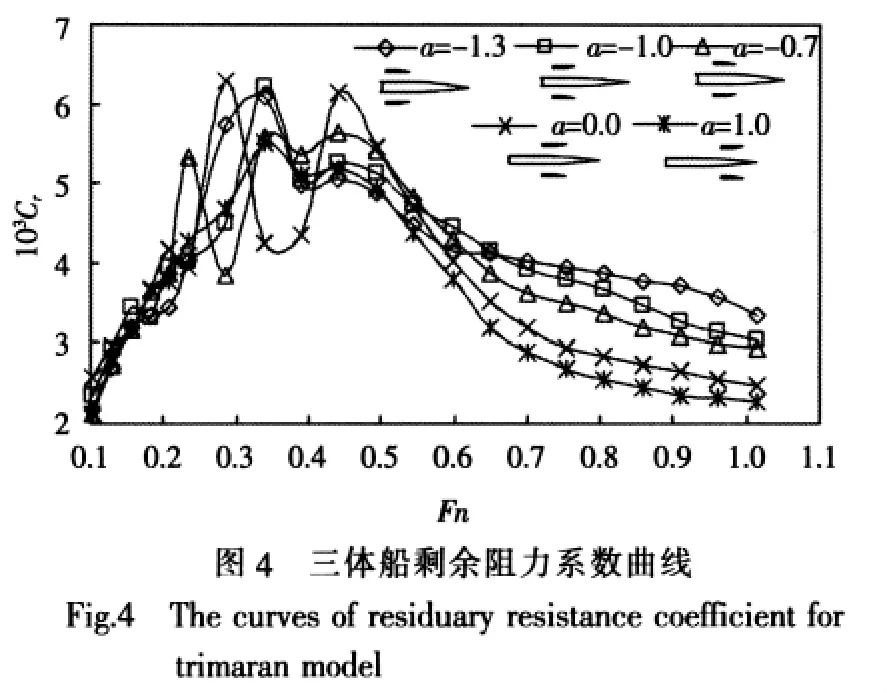
从图 4 可看出,在Fn=0.1~0.2 区间内,各种构型三体船的剩余阻力系数相差不大,这是因为在此区间内,摩擦阻力是三体船总阻力的主要成分,而剩余阻力所占比重较小。在 Fn=0.2~1.0 区间内,不同构型三体船的剩余阻力系数之间差别明显,这是因为在此区间内,剩余阻力已成为三体船总阻力的主要成分,而不同构型的三体船,其主体与侧体之间所产生的兴波干扰现象互不相同,从而导致各构型之间的剩余阻力差别明显。为便于分析,将Fn=0.2~1.0区间大致划分为3个区间,即 Fn=0.2~0.5,Fn=0.5~0.65 和 Fn=0.65~1.0,具体如图 5~7 所示。
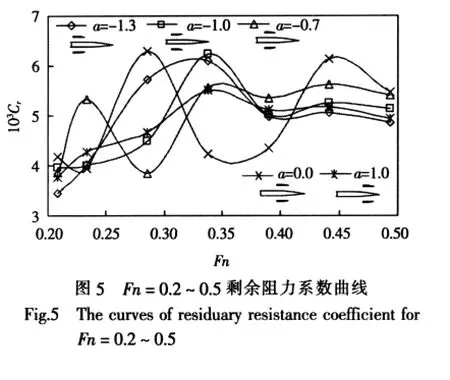
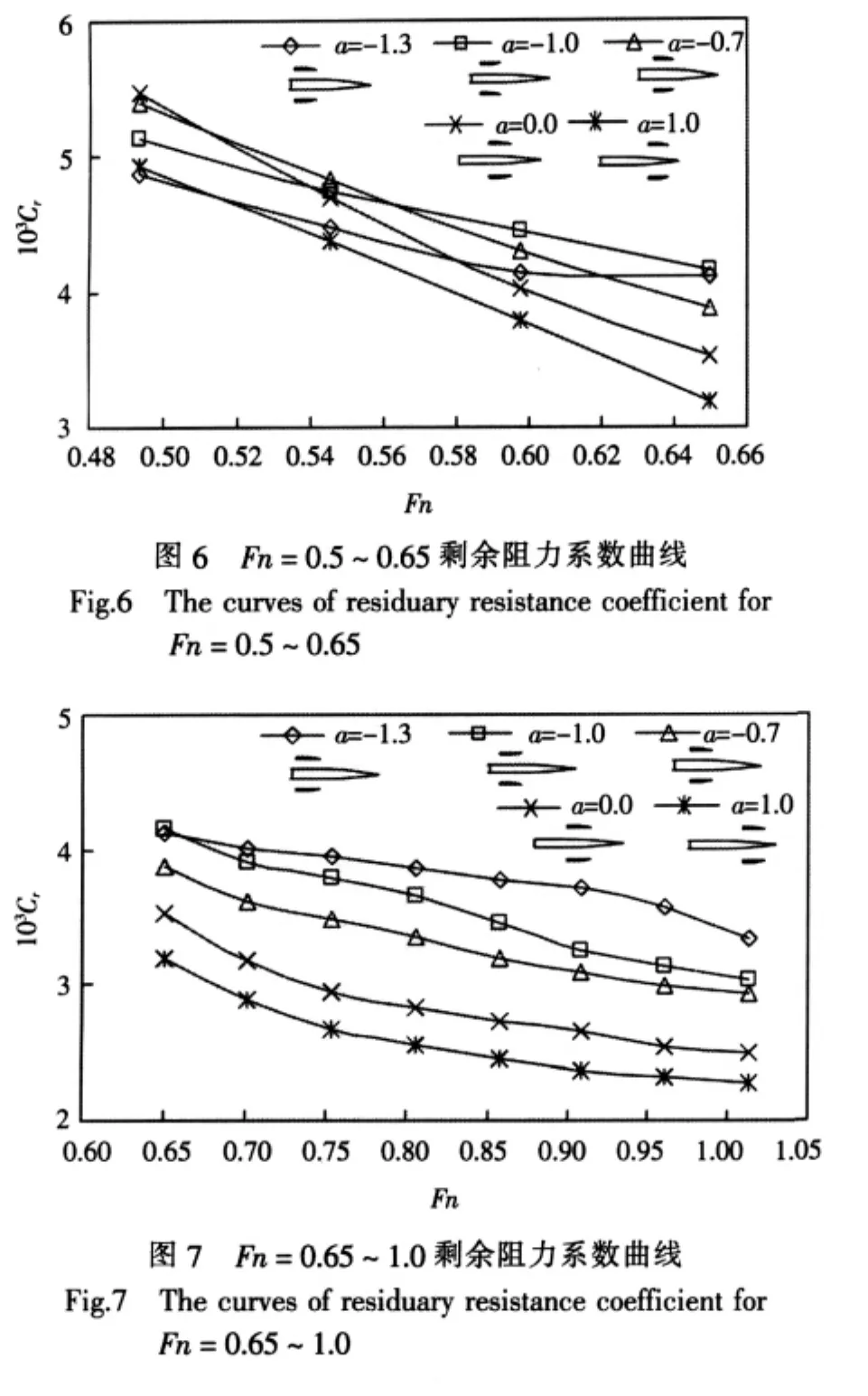
图 5 是 Fn=0.2~0.5 区间内各构型三体船的剩余阻力系数曲线图。从图中可看出,在这一区间内,各种构型三体船的剩余阻力系数均有较大的波动, 而其中a=-0.7和 a=0.0这两种构型的曲线波动尤为强烈。这主要是因为三体船主体与侧体之间产生了强烈的相互干扰,且相互干扰效果随傅汝德数的变化也在不断变化。当主体与侧体之间产生了有利的相互干扰时,兴波阻力就会大大减小,从而使剩余阻力系数降低;而当主体与侧体之间产生了不利干扰时,兴波阻力就会大大增加,从而使剩余阻力系数升高。
具体地, 当Fn=0.27~0.32 时,a=-0.7 构型的剩余阻力系数是所有构型中最小的,在波谷Fn=0.29处,其剩余阻力系数值比同傅汝德数时的最大值(a=0.0 构型) 减小了约 39%; 当Fn=0.32~0.41时,侧体纵向位于主体船舯的a=0.0构型的剩余阻力系数远小于同傅汝德数时的其他构型,在其系数曲线波谷Fn=0.36处,其系数值比同傅汝德数时的最大值(a=-1.0)减小了约30%。在Fn=0.41~0.50 区间内,a=0.0 和a=-0.7 这两种构型产生的剩余阻力是5种构型中的较大者,其余3种构型的剩余阻力均较小,且相互之间差别不大。
图 6 是Fn=0.5~0.65 区间内各构型三体船的剩余阻力系数曲线图。从图中可看出,侧体纵向位于主体舯前的a=1.0构型的剩余阻力系数是所有构型中最小的,其系数值与同傅汝德数时的最大值相比降低了10%以上。
图 7 是 Fn=0.65~1.0 区间内各构型三体船的剩余阻力系数曲线图。从图中可看到,5种构型的剩余阻力系数曲线没有任何交叉,且相互之间几乎呈平行状态分布。按照图中曲线自下而上的顺序(剩余阻力系数由小到大)排列,依次为a=1.0、a=0.0、a=-0.7、a=-1.0、a=-1.3,即随着侧体纵向位置从主体船尾向主体舯前移动,三体船的剩余阻力也在不断减小。在本试验范围内,侧体纵向位于主体舯前的a=1.0构型的剩余阻力最小,与此区间内剩余阻力最大的a=-1.3构型相比,降低了约30%。
4 三体船运动性能
将三体船模型试验测得的纵摇幅值、垂荡幅值和横摇幅值分别进行无量纲处理后,得到了纵摇放大因数 θA/α0、垂荡放大因数 ZA/A0和横摇放大因数 ΦA/α0。 其中,θA为纵摇幅值,rad;ZA为垂荡幅值,m;ΦA为横摇幅值,rad;A0为规则波的波幅,m;α0为规则波的波倾,α0=kA0=2πA0/λ,rad。
将试验数据进行处理后,得到的结果可分成以下4部分,即
1) 三体船纵摇运动响应 (Fn =0.234,Fn =0.494,Fn = 0.701);
2) 三体船垂荡运动响应 (Fn =0.234,Fn =0.494,Fn = 0.701);
3) 三体船横摇运动响应(Fn=0.0);
4)三体船在规则波中的总阻力 (Fn=0.234,Fn = 0.494,Fn = 0.701)。
4.1 三体船纵摇运动响应
图 8~10 分别表示 Fn =0.234、Fn =0.494 和Fn=0.701时各构型三体船的纵摇放大因数随遭遇频率的变化曲线。从图中可看到,在中低速段(Fn=0.234),侧体纵向位于主体船舯的构型其纵摇性能相对较好;而在高速段 (Fn=0.494、Fn=0.701),侧体纵向位于主体船舯或舯前的构型其纵摇性能较好。
4.2 三体船垂荡运动响应
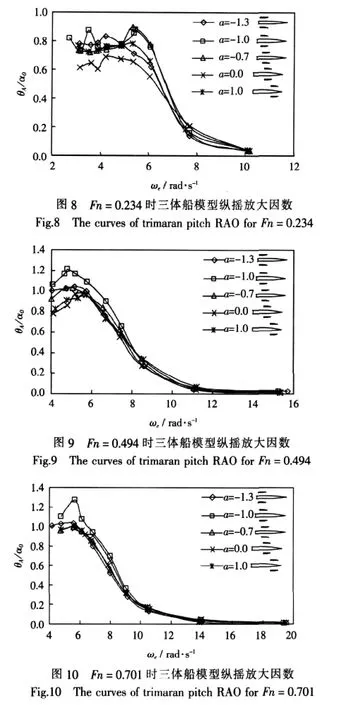
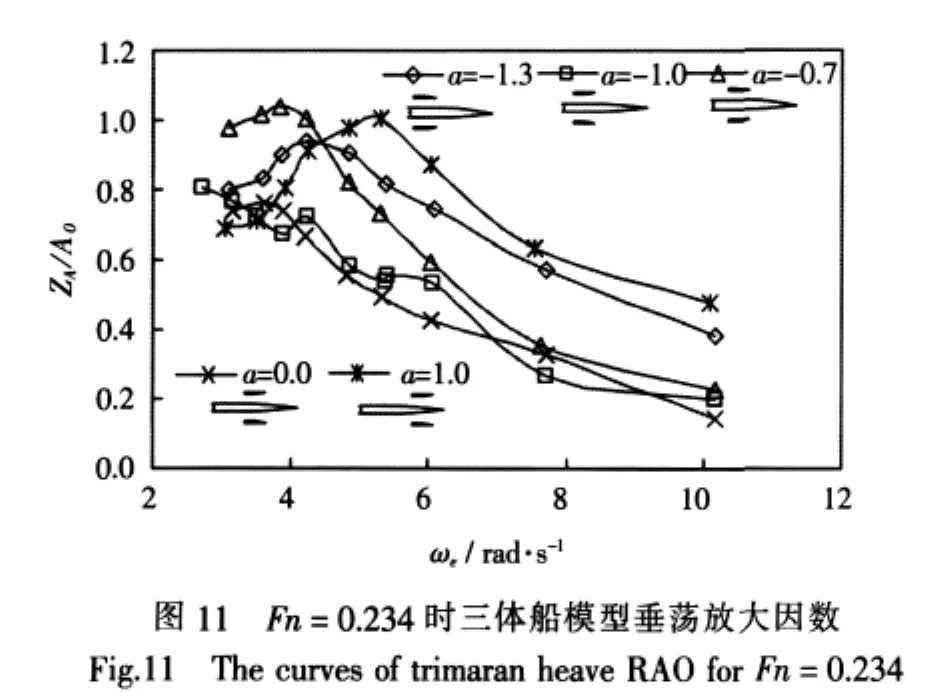
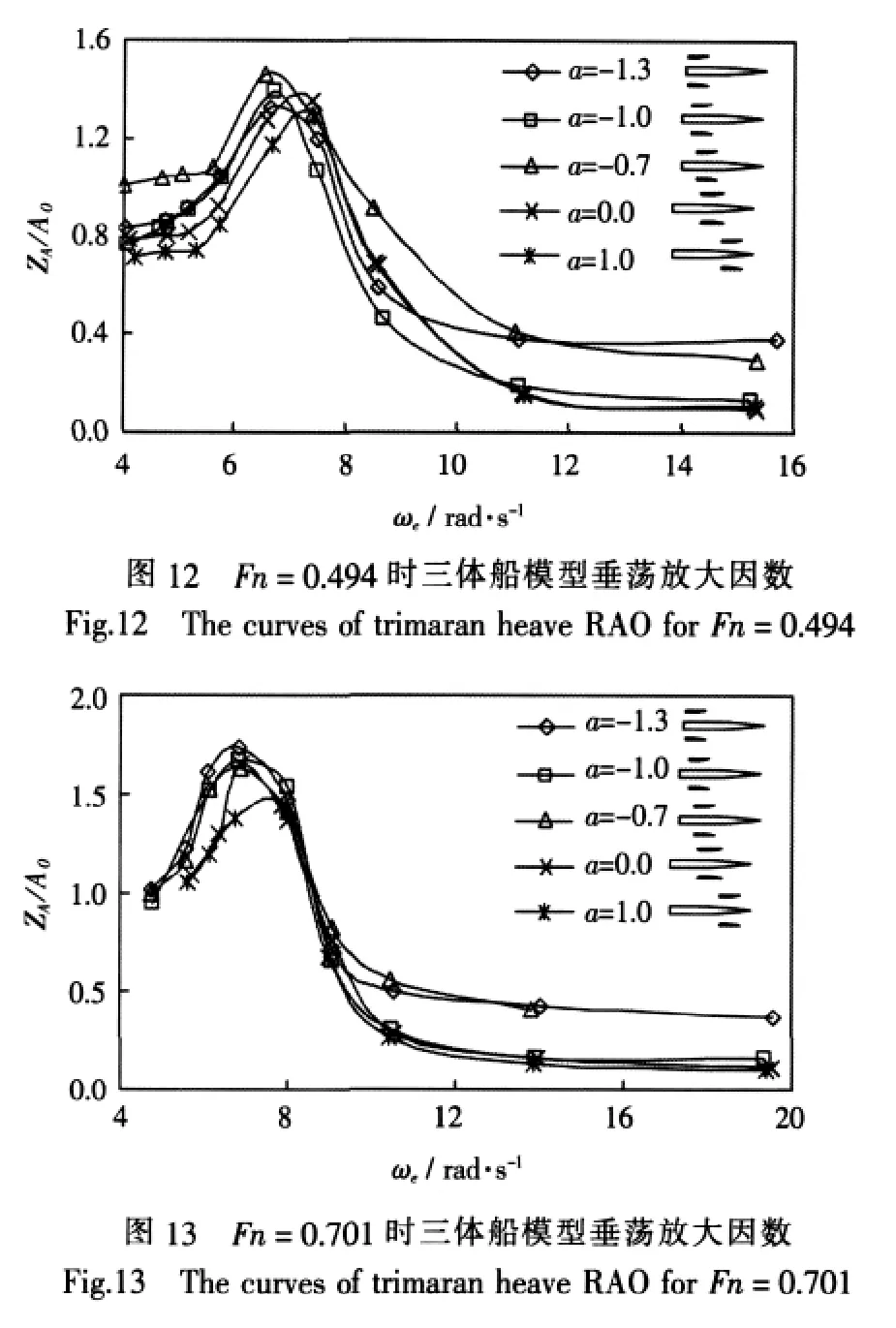
图 11~13 分别表示 Fn=0.234、Fn=0.494 和Fn=0.701时各构型三体船的垂荡放大因数随遭遇频率的变化曲线。从图中可看到,在中低速段(Fn=0.234),侧体纵向位于主体船舯的构型其垂荡性能相对较好;而在高速段 (Fn=0.494、Fn=0.701),侧体纵向位于主体舯前的构型其垂荡性能较好。
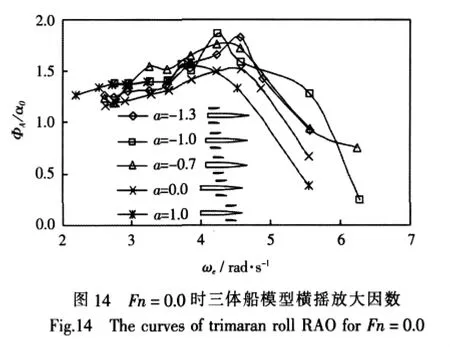
4.3 三体船横摇运动响应
图14为各构型三体船在零航速时的横摇放大因数随遭遇频率的变化曲线。从图中可看到,在ωe<4.5的低频区域内,横摇性能较好的是侧体纵向位于主体船舯的构型;而在ωe>4.5的高频区域内,横摇性能较好的是侧体纵向位于位于主体舯前的构型。
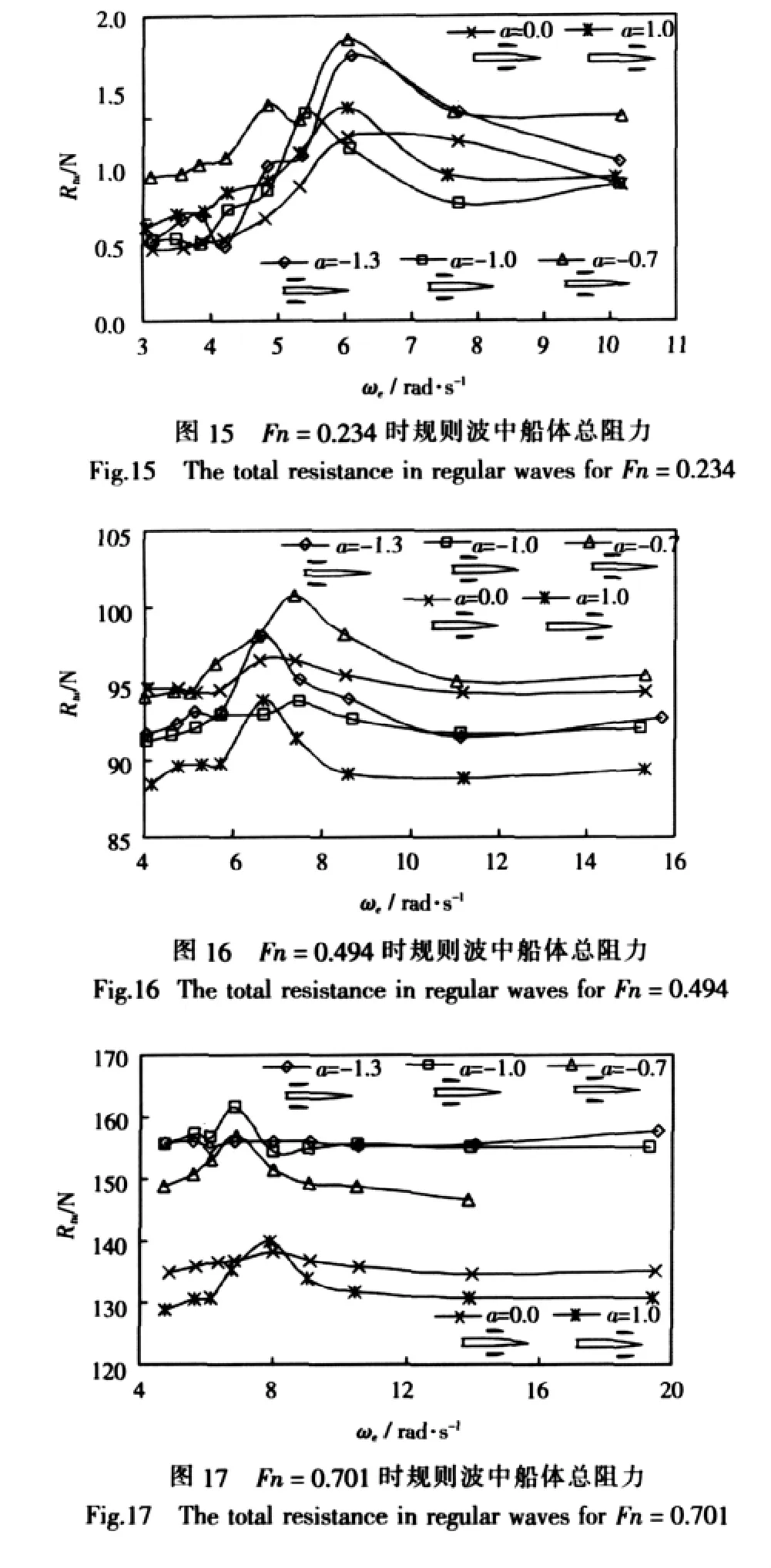
4.4 三体船规则波中总阻力
图 15~17 分 别是 Fn =0.234、Fn =0.494 和Fn=0.701时各构型三体船在规则波中的总阻力。由图中可看到, 在高航速段 (Fn=0.494、Fn=0.701),侧体纵向位于主体舯前的构型其在规则波中的阻力性能优势非常明显。
5 前三体船船型
根据本文的试验结果可以看到,在Fn>0.50的高速段,将三体船侧体的纵向位置选取在主体船舯之前能显著改善三体船在静水中和规则波中的阻力性能。 同时,参考高速段(Fn =0.494、Fn =0.701)的运动响应试验结果可以看到,在Fn >0.50的高速段,侧体纵向位于主体舯前的三体船构型能产生整体上较优的运动性能。
基于这些试验结果,本文提出“前三体船”这一新的三体船船型。这种三体船船型的侧体纵向位置位于主体舯前,如图18所示。
6 结论
本文通过三体船阻力和运动模型试验,研究了三体船侧体纵向位置变化对三体船阻力和运动性能产生的影响,得到以下主要结论:
1)在Fn<0.2区间内,摩擦阻力是三体船总阻力的主要组成部分,三体船的构型变化对阻力影响很小。
2) 在 Fn=0.2~0.5 区间内,三体船主体与侧体之间的相互兴波干扰较强烈,且这种干扰现象是随傅汝德数和三体船构型的变化而不断变化。
3)在Fn>0.50的高速段,对于侧体纵向位于主体舯前的三体船构型,其在静水中和规则波中的阻力性能明显优于其他侧体纵向位于主体船舯和舯后的构型。
4)在Fn>0.65的高速段,三体船剩余阻力大小与侧体纵向位置之间具有明显的规律性,即随着侧体纵向位置从主体船尾向舯前方向移动,三体船的剩余阻力也不断减小。
5)综合比较来看,在中低速段,侧体纵向位于主体船舯的构型能获得较好的纵摇和垂荡性能;而在高速段,侧体纵向位于主体舯前的构型能获得较好的纵摇和垂荡性能。在低频区域内,侧体纵向位于主体船舯的构型其横摇性能较好;而在高频区域内,侧体纵向位于主体舯前的构型其横摇性能较好。
6)基于本文的试验结果和分析,本文提出了“前三体船”这一新的三体船船型概念。
[1]卢晓平,郦云,董祖舜.高速三体船研究综述[J].海军工程大学学报,2005,17(2): 43-48,52.
[2]ACKERS B B, MICHAEL T J,TREDENNICK O W,et al.Investigation of the resistance characteristics of powered trimaran side-hull configurations [J].Society of Naval Architectures and Marine Engineers,1997,105:349-373.
[3]李培勇,裘泳铭,顾敏童,等.三体船阻力模型试验[J].中国造船,2002,43(4): 6-12.
[4]李培勇,裘泳铭,顾敏童,等.超细长三体船耐波性试验研究[J].海洋工程,2002, 20(4):1-4,10.
[5]顾敏童,郑丰,裘泳铭.小水线面三体船阻力试验研究[J].上海交通大学学报,2003,37(8):1222-1225.
[6]DEGIULI N,WERNER A,DOLINER Z.Experimental determination of wave pattern resistance of a trimaran [C]//Proceedings of XVII IMEKO World Congress.Dubrovnik,2003:1396-1401.
[7]SE M O,SEUNG H L,YOUNG L G.Hull form optimization of a small trimar:an by model testing [J].Journal of Ship&Ocean Technology,2005,9(3):14-22.
[8]何木龙,李百齐,程明道,等.三体船船型分析以及兴波干扰的模型试验研究 [J].水动力学研究与进展A辑,2006,21(1):122-129.
[9]郦云,卢晓平.高速三体船阻力性能研究[J].船舶力学,2007,11(2):191-198.
[10]唐丰.新型双体船和三体船阻力性能研究 [J].船舶,2007(2):1-4.
[11]蔡新功,王平,谢小敏.三体船方案优化布局的阻力计算与试验研究[J].水动力学研究与进展A辑,2007,22(2):202-207.
[12]HEBBLEWHITE K,SAHOO P K,DOCTORS L J.A case study:theoretical and experimental analysis of motion characteristics of a trimaran hull form [J].Ships and Offshore Structures,2007,2(2):149-156.
Fore-Body Trimaran and Experimental Study of Its Resistance and Motion Characteristics
Jia Jing-bei1 Zong Zhi2 Zhang Wen-peng2
1 College of Ocean Engineering, Dalian Ocean University, Dalian 116023,China
2 School of Naval Architecture Engineering, Faculty of Vehicle Engineering and Mechanics, State Key Laboratory of Structural Analysis for Industrial Equipment, Dalian University of Technology,Dalian 116024,China
The resistance and motion characteristics of trimaran hull form have been studied by experimental method.The model experiment consists of two parts: the resistance experiment on calm water and the motion experiment in regular waves.According to the experimental data, it can be found that the longitudinal arrangement of the side-hulls plays an important role in trimaran resistance and motion characteristics.For high speed range, the trimaran resistance and motion performance could be significantly improved by placing the side-hulls before the mid-ship of the main hull.Based on the experimental results, a new ship type known as fore-body trimaran is presented.
semi-planing fore-body trimaran; resistance characteristics; motion characteristics; model test
U661.31
A
1673-3185(2011)02-09-06
10.3969/j.issn.1673-3185.2011.02.002
2010-04-12
创新研究群体科学基金:海洋环境灾害与结构安全防护(50921001);国家重点基础研究发展计划项目:复杂装备研发数字化工具中的计算力学和多场耦合若干前沿问题(2010CB83270)
贾敬蓓(1984- ) ,女,博士,讲师。 研究方向:船舶水动力学。 E-mail:jiajingbei_1221@163.com
宗 智(1964- ),男,教授,博士生导师。 研究方向:船舶与海洋工程。E-mail:zongzhichina@163.com
