插电式串联混合动力汽车发动机起停控制策略的优化*
2011-02-27李献菁孙永正胡宗杰李理光
李献菁,孙永正,邓 俊,胡宗杰,李理光
(同济大学汽车学院,上海 201804)
前言
插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV)可以通过充电装置从电网获取电能,通常该类汽车还具有一定的纯电动行驶能力。因其较多地使用网电,燃料消耗低,节能减排效果显著,被认为是一种当前最易接受的、市场前景乐观的混合动力电动汽车驱动模式。
目前对PHEV的研究主要集中在不同行驶工况[1-2]、燃油经济性计算方法[3]、动力参数匹配[4]、控制策略及不同能源的使用[5]等方面对燃油经济性的影响。针对串联混合动力汽车(SHEV)的研究主要集中在控制策略和动力参数匹配方面。研究表明,SHEV可将发动机调整在最佳工作点附近稳定运转,使发动机避免怠速和低速运转的工况,从而提高了发动机的效率,减少了废气排放。单独针对插电式串联混合动力汽车(plug-in series hybrid electric vehicle,PSHEV)的研究则少见报道。
除车辆的行驶工况和动力参数匹配等因素外, PSHEV的燃油经济性还与两次外接充电间隔所行驶的距离和发动机的运行时间、起停控制策略等有关[6]。本文中基于某PSHEV车,结合不同行驶循环工况和行驶里程,对车辆行驶过程中发动机的起停控制策略进行优化。
1 整车参数及能量管理策略
1.1 整车参数
文中介绍的PSHEV整车参数及性能仿真结果见表1。动力系统主要由发动机、ISG电机、驱动电机、机械传动装置和动力电池等部分组成。发动机和ISG电机同轴连接,动力电池通过控制器串接在ISG电机和驱动电机之间,动力系统示意图如图 1所示,各部件参数见表 2。
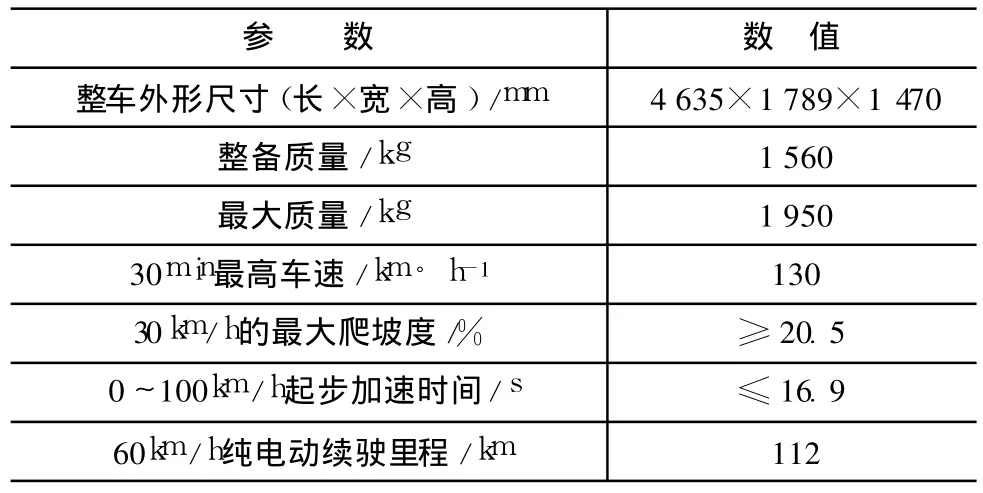
表1 PSHEV整车参数

表2 动力系统各部件参数
1.2 PSHEV能量管理策略
通常PSHEV能量管理策略可分电量消耗和电量维持两个阶段。电量消耗阶段主要消耗电池电能,实现“零排放”行驶,而电量维持阶段主要消耗发电机发出的电能[7]。文中介绍的PSHEV采用基于规则的逻辑门限开关控制策略实现两个阶段的过渡,因此,动力电池的 SOC上下限值和发动机的工作区域是影响整车经济性的关键因素。
1.2.1 电池SOC范围
按照目前车辆报废标准,轿车的报废年限是 10~15年,若电池每天都进行一次满充深放电,则需要电池的循环寿命在 4 000次以上。如图 2所示,当放电深度在60%~35%时,锂电池的循环寿命可达到此要求[8]。
通过仿真计算可以得出不同车速下电池电压随SOC的变化关系[9],为保证电机的正常工作电压,将SOC的界限值设为 90%~30%。根据日常出行情况,并不是每天都满充深放电,电池的放电深度为70%时,更有利于延长电池的寿命。
1.2.2 发动机工作区域
图3为发动机等燃油消耗率曲线。发动机采用恒功率控制策略,在不考虑附件的情况下,通过直接起停技术取消发动机怠速,使发动机起动后即工作在2 400r/min,55N·m的恒转速恒转矩工况点,如图 3中黑点所示。该工况点靠近发动机的最佳燃油经济性曲线,处于燃油经济性较好的区域。
由此,当动力电池SOC小于30%时,发动机起动,在预定的高效工况点工作;当SOC大于90%时,发动机则停机,进入纯电动模式。
2 发动机起停控制策略优化
纯电动驾驶可最大限度地利用电网充入的能量,使车辆的经济性和排放性都达到最佳。按原控制策略,发动机工作在高效工况点,纯电动续驶里程(all electric range,AER)一定时,行驶里程的长短将会影响到发动机的运行时间和起停次数,进而影响整车的经济性。因此在行驶距离大于AER时,应考虑对发动机的起停控制策略进行优化。
2.1 原控制策略下的AER
为考察该车在日常出行过程中的AER,分别在新欧洲行驶工况(NEDC)、美国环保局的城市汽车测功器行驶规范(UDDS)、美国环保局的公路行驶规范(HWFET)、中国轻型车城区运转循环(CUDC)和中国轻型车快速运转循环[10](CHDC)5种行驶工况下对整车性能进行仿真计算。不同行驶工况下电池SOC和发动机工作状态随行驶里程的变化关系如图4所示。
由图4可见,在5种行驶工况下,电池SOC从90%~30%不断下降的过程中,发动机均没有起动,说明该车在没有发动机辅助的情况下完全可以满足各种行驶工况的功率需求。不同行驶工况对车辆的需求功率不一样,电池SOC变化的快慢就不一样,因此AER也不同,但都在60km左右。
当电池SOC下降到设定的最低限值时发动机起动,ISG电机给驱动电机提供电能。发动机起动后,在HWFET行驶工况下,SOC基本保持在一个水平,而其余4种行驶工况下,SOC均呈上升趋势,直至达到最高限值,说明这 4种行驶工况下有较多的电能存储到电池中。
根据美国NPTS(nationwide personal transportation survey)车辆日常行驶里程统计,用户日行驶里程多在50km以内[11]。因此,对于 50km以内的短途行程,该车完全可以只由车载动力电池提供动力。在纯电动行驶里程以外,可以依靠车载的小型发动机发电来驱动电机继续工作,满足更长的行驶里程需求。
2.2 初始电池满电时发动机起停控制策略的优化
不考虑类似HWFET的行驶工况,根据原有控制策略,在下一次外接充电之前,车辆连续行驶若干个行驶工况后,电池SOC随行驶里程的变化趋势如图 5实线和点划线所示。两者分别表示初始电池满电及初始电池未满电的情况。
下面从不同循环工况来分析两次外接充电间隔期间的行驶里程大于 AER时发动机起停时刻对发动机累积运行时间(即行车充电时间)的影响。选取NEDC和UDDS工况为仿真循环工况,假设电池充满电,电池SOC从90%下降到不同程度时起动发动机,SOC的变化情况如图6和图7所示,发动机工作状态如图 8和图 9所示。
为了充分利用从电网得到的低价能量,要求行车过程中尽可能减少发动机起停次数和行车充电时间。结合图 5,观察图中实线和双点划线变化情况。实线为按原控制策略行车,电池SOC下降到设定最低限值时起动发动机。双点划线可分为两种情况: (1)在纯电动过程中,电池SOC下降到某一值C时发动机起动,直至电池充满电再停机转而以纯电动行驶;(2)行车充电过程中,电池SOC上升到某一值A时发动机关闭。可以发现,行驶里程同样为 D时,这两种方法都有利于减少发动机起停次数和运行时间。两种方法都是使发动机给电池充入的电能刚好在下一次外接充电前用完,这样有利于节省燃油消耗,降低成本。
不同行驶工况对电力驱动系统的需求功率不同,电池SOC变化快慢就不同,AER也不一样,导致行车过程中发动机的起停次数和行车充电时间迥异。因此需要结合不同行驶工况下 SOC的变化量来分析确定发动机的起停时刻。在原有控制策略的基础上,可以根据行驶里程的长短来优化发动机起停时的SOC值。首先针对以上两种行驶工况,计算各自纯电动行驶和行车充电过程中单位行驶里程的SOC变化量,结果如表3所示。

表3 单位行驶里程的SOC变化量 %/km
结合图 5,分别在纯电动运行和行车充电两种模式下对NEDC循环工况下控制发动机起停的关键参数SOC值进行修正,则纯电动行驶过程中,发动机起动时的SOC值为
行车充电过程中,发动机停机时的SOC值为
同样可对UDDS循环工况进行修正。图10、图11分别为进行SOC修正后连续运行NEDC和UDDS循环,行驶里程为100km时SOC的变化情况。
表4和表5分别为NEDC和UDDS行驶工况下优化前后的SOC值及发动机运行时间对比。行驶里程为100km时,由上述方法可得出NEDC行驶工况的纯电动过程中,SOC下降至约66%时起动发动机,相比原控制策略,整个过程发动机累计运行的时间将近减少一半,因此燃油消耗量和因发电而损失的能量也会大幅度减少;行车充电过程中,SOC上升到约 54%时关闭发动机,发动机累计运行时间为2 403s,运行时间减少46.1%。

表4 NEDC运转循环下优化前后结果对比

表5 UDDS运转循环下优化前后结果对比
同样行驶里程为100km时,对于UDDS运转循环,纯电动过程中,SOC下降至约62.6%时起动发动机,发动机运行时间 2 287.6s,运行时间减少56%;行车充电过程中,SOC上升到约57.4%时关闭发动机,发动机运行时间为 2 455s,减少运行时间达52.8%。可见两种模式下得出的结果相近。
对于CUDC和CHDC循环工况的分析结果类似。而对于 HWFET循环工况,经仿真计算,电池SOC下降到最低限值前起动发动机则会使电池电能不能充分利用,故车辆在HWFET循环下应先使电池耗尽再起动发动机再按电量保持模式继续运行。上述公式仅适用于初始电池满电且行驶里程介于AER和(2AER+CR)的情况。
2.3 初始电池未满电时发动机起停控制策略的优化
车辆并不是每次出行时都能保证电池SOC处于满电状态。电池未充满电,即存在不同 SOC初值。SOC初值不同,车辆在相同的行驶工况下以纯电动行驶的里程也不一样,因此,须对上述公式做相应的修正。
为尽可能利用外接充电电能,减少发动机起停次数和行车充电时间,先让电池耗尽,再在行车充电过程中确定发动机关闭时刻。
仍以NEDC运转循环为例,假设出行时电池的初始SOC为60%,初始纯电动行驶里程为AER0。当D-AER0<AER+CR时,可确定行车充电过程中发动机关闭的SOC值为NEDC工况下行驶里程达到100km时,修正前后SOC及发动机工作状态随行驶里程的变化情况如图12所示。
2.4 延展里程过程中发动机起停控制策略的优化
对于可以满足各种行驶工况需求功率的PSHEV,不管出行时电池是否满电,发动机的起动主要是在延展里程[12]过程中出现。不计车辆以外接充电电能纯电动行驶的里程,即从发动机第一次起动到下一次外接充电时的累积行驶里程为目标延展里程。当目标延展里程介于0和(AER+CR)时,仍可按式(2)进行修正。当目标延展里程大于(AER+ CR)时则可按如下方法进行修正:
设发动机累积起动次数为n,目标延展里程为DRXT,则
经过仿真计算得到NEDC循环下的AER及行车充电至电池满电时的里程 CR。假设发动机起动次数为 2,目标延展里程为 160km时,按照上述方法,将数据代入公式(4),并结合NEDC运转循环进行仿真计算,可以得到电池SOC及发动机运行状态随行程的变化关系,如图 13所示。
从图中可见,整个过程发动机须起动 2次,在第2次起动后对SOC进行修正。当SOC上升到59%时关闭发动机,利用发电机给电池充入的电能继续后面的路程。
综上所述,在整个延展里程行驶过程中,都可用此方法对行车充电过程中发动机的关闭时刻进行优化修正,以利于缩短行车充电时间,充分利用电网电能对电池进行充电,达到节能减排的效果。
3 结论
(1)与原控制策略相比,根据不同循环工况和行驶里程确定纯电动过程中起动发动机和行车充电过程中停机时的SOC值的方法,可有效缩短行车充电时间,减少因发动机充电而引起的能量损失。
(2)对于初始电池满充、AER接近60km的PSHEV,根据优化后的控制策略,在NEDC行驶循环下,车辆行驶里程达到 100km时,两种模式下发动机运行时间可分别减少49.4%和46.1%;UDDS运转循环工况下,发动机运行时间则可分别减少 56%和52.8%,有利于节省燃油,减少能量损失。
(3)对于初始电量未满的PSHEV,按同样的方法进行优化发动机的起停控制策略,亦可获得相近的节能效果。该方法也可用于增程型电动车辅助动力系统的控制。
[1] Karbowski Dom inik,Pagerit Sylvain,Kwon Jason.“Fair”Comparison of Powertrain Configurations for Plug-In Hybrid Operation Using Global Optimization[C].SAEPaper 2009-01-1334.
[2] Gonder J,Brooker A.Deriving In-Use PHEV Fuel Economy Predictions from Standardized Test CycleResults[C].Conference Paper,NREL/CP-540-46251,August 2009.
[3] Gonder J,Simpson A.Measuring and Reporting Fuel Economy of Plug-In Hybrid Electric Vehicles[C].Conference Paper,NREL/ CP-540-40377,November 2006.
[4] 邵强,董光宇,Massimo Onofri,等.串联混合动力摩托车动力系统设计及仿真[J].小型内燃机与摩托车,2008,37(1):57-61.
[5] Elgowainy Amgad,Burnhum Anlrew,Wang Michael.Well-toWheels Energy Use and GreenhouseGas Emissionsof Plug-in Hybrid Electric Vehicles[C].SAE Paper 2009-01-1309.
[6] Richard“Barney”Carlson,Henning Lohse-Busch,Michael Duoba.Drive Cyc le Fuel Consumption Variabilityof Plug-In Hybrid E-lectric Vehicles Due to Aggressive Driving[C].SAE Paper 2009 -01-1335.
[7] Elias Zgheib,Denis Clodic.CO2Emission and Energy Reduction Evaluations of Plug-in Hybrid Vehicles[C].SAE Paper 2009-01 -1324.
[8] Markel T,Simpson A.Plug-In Hybrid Electric Vehicle Energy Storage System Design[C].Conference Paper,NREL/CP-540-39614,May 2006.
[9] 孙永正.插电式串联混合动力轿车动力匹配与控制策略研究[D].上海:同济大学,2010.
[10] 中国汽车技术研究中心.QC/T 759—2006,汽车试验用城市运转循环[S].http://www.gb99.cn.
[11] Simpson A.Cost-Benefit Analysis of Plug-In Hybrid Electric Vehic le Technology[C].Conference Paper,NREL/CP-540-40485,November 2006.
[12] Koji Imai,Takashi Ashida,Yan Zhang.Theoretical Performance of EV Range Extender Compared with Plug-in Hybrid[J].Journal of Asian Electric Vehicles,2008,6(2).
