喷嘴性能试验器压力模糊控制系统设计
2011-02-19黄晓峰
黄晓峰
HUANG Xiao-feng
(湖南工业大学 电气与信息工程学院,株洲 412008)
0 引言
喷嘴是航空发动机的关键部件,喷雾锥角与不均匀度是喷嘴的两个重要指标,直接影响燃烧。喷嘴工作压力是喷嘴性能试验器的关键参数,对雾化角与不均匀度有重要影响。根据南方航空喷嘴性能检测工艺要求,检测时工作压力要求2.3±0.01MPa,雾化角85º±5º,雾化不均匀度≤25%。试验器压力控制是否精确,直接决定喷嘴测试是否合格。本文基于模糊PID控制,开发出喷嘴性能综合测试设备,实现喷嘴综合性能的智能检测。
1 系统结构
液压系统设计由齿轮泵、比例溢流阀、流量变送器、压力变送器、流量分布盘和量杯组等组成。计算机控制系统设计由工控机与PLC组成。图像采集处理系统设计由CCD彩色摄像机、图像采集卡与工控机组成。
2 压力模糊PID控制原理
压力变送器把喷嘴工作压力,转换为4~20mA信号,通过FX2N-4AD转换成12位数字信号,经可编程控制器FX2N的通讯模块FX2N-485传给计算机,计算控制量的大小,通过FX2N-2DA输出,并由电液比例控制器(VT-2000BS40G)放大,转换成100~800mA电流信号,控制比例溢流阀电磁铁磁力大小,调节比例溢流阀(DBE10-30/5Y/2)阀芯的开度,得到稳定的压力。电液比例溢流阀压力控制系统是非线性环节,存在死区、滞环和温漂,难建立准确数学模型。
2.1 模糊PID控制原理
数学模型:

传统PID控制效果较好,但也存在不足。
1)PID控制器的参数必须相对于某一特定系统(模型已知、系统参数已知)进行整定;
2)PID控制器参数一旦整定完毕,便只能固定地适应于一种工况[1]。大多数生产过程都具有非线性,特征随时间的变化而变化,当过程特性和环境发生变化时,需要控制器做相应的调整,以保证控制质量,但传统PID控制没有这种“自适应”能力,而需要重新整定参数。
2.2 模糊控制
模糊控制器是一种语言控制器,包括:模糊化、模糊规则库、模糊推理和模糊决策。Mamdani二维模糊控制器规则[7]:
其中Ai、Bj是输入量E、EC在论域上的模糊子集;Cij~为输出量U在论域上的模糊子集。
由模糊规则确定的模糊关系为

其中R的隶属函数为

当E、EC取模糊集A、B时,输出的控制量变化U由模糊推理合成规则可得

2.3 模糊PID控制
模糊控制相当于PID控制器的作用,动态特性良好,但无法消除静态误差。为提高控制精度,需引入积分功能。1987年,Ying首次将模糊控制通过解析方法与传统控制器联系起来,并且证明了Mamdani模糊控制器是具有变增益的非线性PID控制器[2]。
模糊PID控制器分为直接控制型、增益调整型和混合型控制器[3]。本试验器采用误差驱动增益调整型模糊PID控制器,通过专家知识确定控制器的PID增益参数∆KP、∆KI、∆KD与误差e和误差变化∆e之间的模糊关系,在运行中不断检测e和∆e,通过模糊推理对PID的三个参数进行在线修改,满足不同e和∆e对控制参数的不同要求,使被控对象具有良好的动态和静态性能。它是误差e和误差变化∆e的非线性函数,它的规则形式如下[4]:
3 模糊PID控制器设计
压力模糊PID控制器分为常规PID控制部分和模糊推理的参数校正部分,模糊推理选择双输入三输出模糊控制器,采用Mamdani模糊控制算法,加权平均法模糊判决。输入量为e和ec,输出量是PID 增益参数∆KP、∆KI、∆KD。由模糊推理在线修正PID参数。

其中K'P、K'I、K'D是系统原先整定好的PID参数,∆KP、∆KI、∆KD是模糊控制器的输出。
模糊PID控制系统结构如图1所示。

图1 模糊PID控制系统原理图
输入e和ec的论域为{-3,-2,-1,0,1,2,3},输出∆KP、∆KI、∆KD的论域为{-3,-2,-1,0,1,2,3}。
将输入、输出变量都划分为7个等级,对应语言值的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},分别代表“负大,负中,负小,零,正小,正中,正大”。
为提高系统压力的精度,对输入、输出变量都采用三角形隶属度函数。
3.1 模糊控制规则
模糊控制器的核心是模糊控制规则,PID控制中,KP、KI、KD具有以下特点[5]:
1)KP增大,可以加快响应速度,减小系统稳态误差,提高控制精度,但过大会使系统产生超调,甚至导致不稳定。
2)积分作用主要是消除系统静态误差。积分增益增大,有利于减小系统静差,但是KI过大,会加大超调,甚至引起振荡。
3)微分作用可以改善动态性能。增大微分增益KD,有利于加快系统响应,使系统超调量减小,稳定性增加,但对扰动敏感,抑制外部干扰能力减弱;若KD过大,会使调节过程出现超调减速,调节时间增长;反之,若KD过小,系统响应变慢,稳定性变差。
针对不同的e和ec,刘金琨总结出了一套KP、KI、KD参数的整定原则[6]:
1)当e较大时,为使系统具有较好的跟踪性能,应取较大的KP与较小的KD,同时为了避免系统响应出现较大的超调,应对积分作用加以限制,通常取K=0。
2)当e和ec中等大小时,为使系统具有较小的超调,KP应取得小些。在这种情况下,KD的取值对系统的影响较大,应取得小一些,KI的取值要适当。
3)当e较小时,为使系统具有较好的稳定性能,KP与KI均应取得大些,同时为避免系统在设定值附近出现振荡,并考虑系统抗干扰性能,当较大时KD可取得小些;ec较小时KD可取大一些。
根据以上规则建立模糊控制规则表[6]。
3.2 系统仿真
利用模糊逻辑工具箱设计试验器压力模糊PID控制模型,建立模糊PID控制子系统。如图2所示。比例溢流阀控制模型近似比例环节和二阶振荡环节的组合[7],用二阶系统代替其模型进行仿真研究。
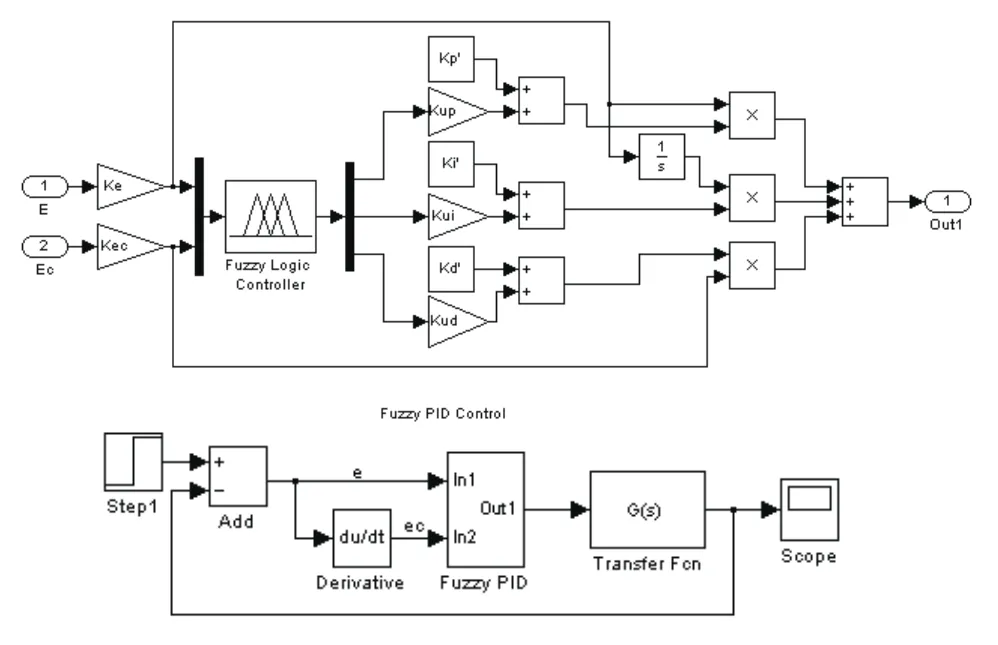
图2 压力模糊 控制系统结构框图
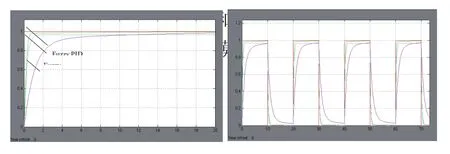
图3 单位阶跃响应与单位方波信号响应
仿真结论:对于单位阶跃信号,PID控制的动态响应速度特性较差,系统的调节时间长。普通模糊控制较好地克服了PID控制响应速度较慢的缺点,但系统出现静态误差,如不加入积分环节,难以完全消除误差,控制精度不高。而模糊PID控制较好地结合了模糊控制和PID控制的优点,既能达到较快的响应速度,超调量较小,又能保证系统的稳态精度。方波信号响应中,模糊PID控制对于方波的跟踪效果最好,控制性能优于PID控制和模糊控制。
3.3 实际运行结果
试验器现场采用PID与模糊PID控制,对控制效果进行比较,模糊PID控制适应性强,受到外界干扰时能迅速的恢复稳态,控制效果优于PID控制器。采用模糊PID控制的压力稳定在2.3±0.01MPa。现场采集的压力实时运行曲线对比如图4所示。实际运行如图5所示。
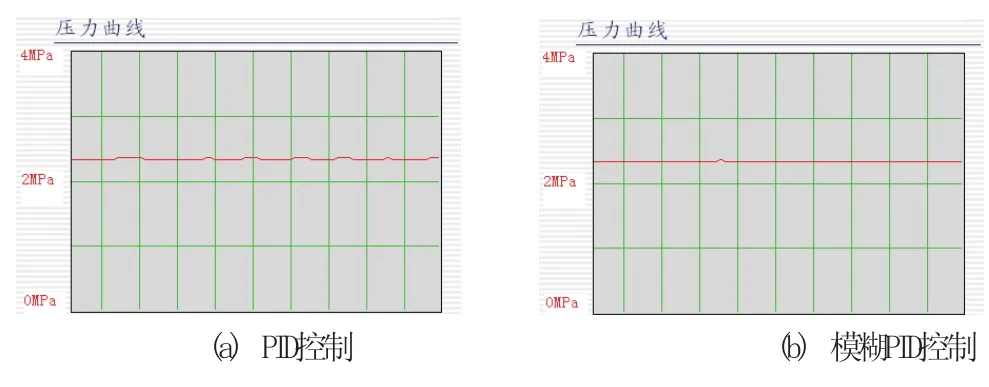
图4 现场实时压力运行曲线
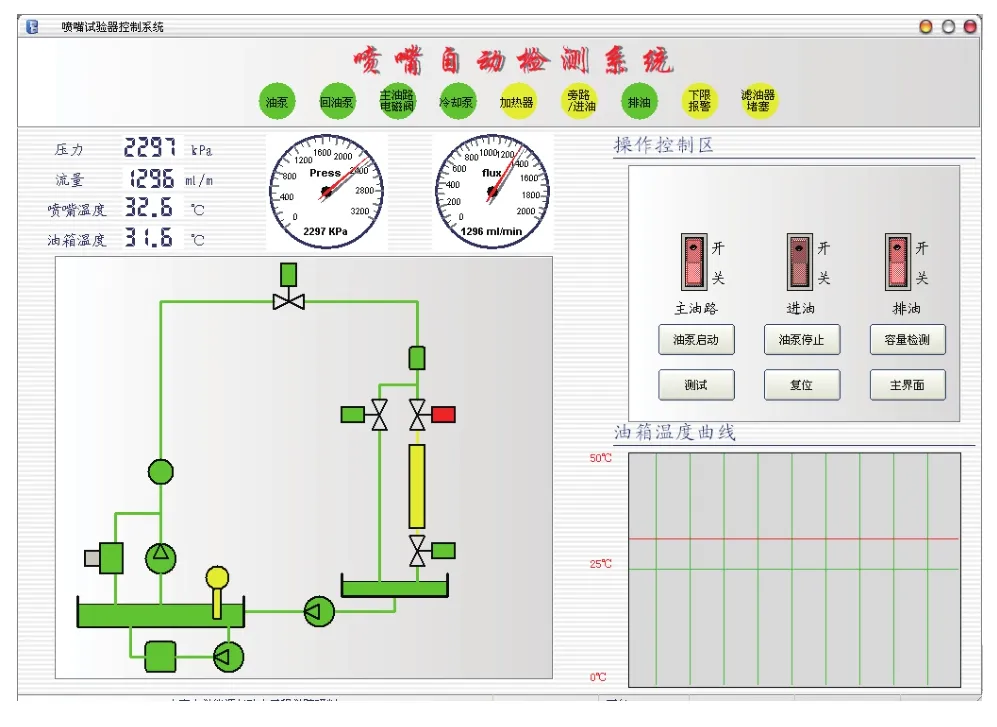
图5 程序实际运行界面
4 结论
基于模糊PID的喷嘴综合性能试验器压力控制方案,结合PID控制与模糊控制的优点,通过仿真分析与实际运行,模糊PID控制较好地结合了模糊控制和PID控制的优点,响应速度较快,超调量较小,又能保证系统的稳态精度。经长期实际运行,模糊PID控制明显优于PID控制。
[1]薛洁.模糊自调整二自由度PID控制器及在磨矿分级中的应用[D].昆明:昆明理工大学,2002.
[2]K.S.ang,Kim Fung.An Optimal Fuzzy PID Controller[J].Transactions on Industrial,2001,48:757-765.
[3]K.A.Gopala Rao,B.Amarendra Reddy,P.Durga Bhavani.Fuzzy Pi and Integrating Type Fuzzy Pid Contronllers of Linear,Nonlinear and Time-Delay Systems[J].International Journal of Computer Applications,2010.1:43-49.
[4]胡包钢,应浩.模糊PID控制技术研究发展回顾及其面临的若干重要问题[J].自动化学报,2001,27(4):567-584.
[5]李卓,萧德云,何世忠.基于Fuzzy推理的自调整PID控制器[J].控制理论与应用,1997,14(2):238-243.
[6]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003:10-165.
[7]王传礼,丁凡,殷建立等.卷染机电液控制系统的动态特性研究[J].浙江大学学报,2004,38(5):631-635.
