基于光纤传感器的投影图像梯形失真校正系统
2011-02-03杨春勇
杨春勇,徐 杰
(中南民族大学电子信息工程学院,武汉430074)
投影仪已在人们的学习、工作和生活中得到广泛应用.然而投影仪繁琐的调校过程让用户时常感觉苦恼无奈.比如,在某些特殊环境下,因难以保证投影仪与投影屏幕位置正对,故采用投影仪自带的梯形校正功能进行光学或者数码调校[1],但此方法操作繁琐、耗时且校正尺度小,还需用户对投影仪的调校操作较为熟练.若投影环境发生改变,又需重新调校,极为不便.为解决此问题,人们已进行了多种尝试.如,在投影仪内置入加速传感器(NEC NP61+系列商务投影仪),计算投影仪的倾斜角度,但加速传感器不能识别投影仪水平方向偏移角;或通过摄像头反馈投射屏幕的图像形状,进行自适应调整[2],摄像头反馈方法自适应校正耗时过长,且容易受环境光的干扰.综合看来,现有方法均存在不足.
针对现有方法上的不足,本文设计一种基于嵌入式光纤传感技术的投影自动校正系统.该系统的设计思路是在投影屏幕的4个顶点埋置嵌入式光纤传感器,利用光纤传感器感测投影仪投射出的结构光信号,通过计算得出投影屏幕与投影仪间的透视关系,再以此对源图像进行反向补偿校正,用以抵消图像投影过程中产生的梯形失真.
1 系统组成结构
本文所设计的投影自动校正系统是先通过定位子系统获取投影屏幕空间位置信息,以此建立投影屏幕与投影仪间的透视关系模型;再根据模型得出的校正参数对源图像进行数码校正;最后投影输出,实现校正功能.系统组成结构如图1所示.

图1 系统结构模型Fig.1 System architecturemodel
在投影幕布4个顶点位置分别嵌入编号为A、B、C、D的光纤探头;4个顶点采集到的结构光信号分别通过光纤导连至传感控制器;传感控制器利用光传感器将感测到的光强信号编码成二进制数码位,通过无线传输的形式发送给校正处理系统服务端;Server端对投影幕布与投影仪的透视位置关系进行计算,获取图像补偿参数;Client端将用户的桌面图像传输到Server端;Server端在补偿参数的作用下利用图像几何失真校正原理,将用户的桌面图像进行补偿后输出给投影仪执行投射;Server端与投影仪之间通过视频传输线连接,与Client端之间用5类双绞线跳线连接.
Server端是该系统结构中的核心,主要实现结构光扫描定位、接收校正Client端图像和投影输出.
2 投影定位
投影定位系统主要由嵌入式光纤传感反馈系统和扫描定位系统两部分组成.
2.1 嵌入式光纤传感反馈系统
本子系统将光纤嵌入到投影屏幕上,可以结合基于格雷码结构光的扫描定位模块精确地判定屏幕的位置坐标.系统硬件主要由光纤、光电转换模块、自动增益控制模块、滤波模块、AD采样模块、MCU数据处理模块以及其他电路模块组成,硬件电路框图如图2所示.
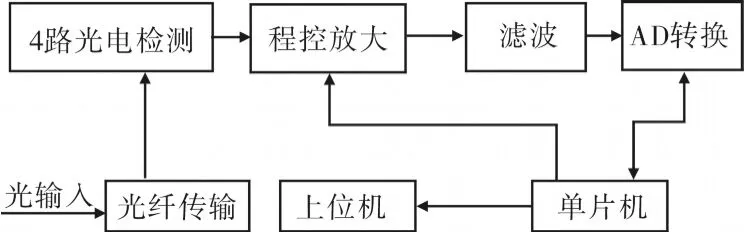
图2 硬件电路框图Fig.2 Diagram of the hardware circuit
(1)光电转换模块.在本系统中,投影仪投射出来的光为可见光,波长范围为390~770nm,扫描频率为2Hz;由于投影屏幕距离较远,光纤导入的光比较微弱.因此,系统的光电转换模块需要具备响应速度快、灵敏度高、抗干扰等功能.基于暗电流、响应时间、上升速度等方面的综合考虑,本文选用PC10-6-TO5型号的PIN光电二极管感测扫描信号.该型号的光电二极管具有较大的感光面积(约10mm2)和较小的暗电流(0.2nA),在可见光波长范围内响应度可达到0.5A/W,光波长响应覆盖整个可见光波长范围.在本微弱光信号环境中,为了减小光电二极管的暗电流噪声的影响,系统中光电二极管工作于光电压模式[3].
(2)自动增益控制模块.由于光电检测器转换得到的光电流很微弱,不便于判断比较,所以本文需要对其进行放大处理.在微弱光信号检测系统中前置放大器应具备低噪声、高增益、低输出阻抗、足够的信号带宽和负载能力,以及良好的线性和抗干扰能力的要求.因此,本系统选用了ICL7650S芯片[4]作为前置放大器.基于投影仪使用环境多变的考虑,光信号的强弱变化不定,前置放大器的增益须能动态调整.否则,会出现小信号得不到有效放大而降低A/D转换的精度,而信号过大则可能超出A/D的检测范围的问题.因此,系统设计通过单片机对多路模拟开关CD4051的控制,实现传感器自动量程选择.CD4051 6个通道上的反馈电阻大小分别为25kΩ、50kΩ、100kΩ、250kΩ、500kΩ、1MΩ.
(3)滤波模块.虽然前端的自动增益部分对微弱直流信号进行了放大,但同时也放大了电路中的噪声信号.在本系统的传感检测模块中,有用信号的频率范围为0~100Hz,所以本文采用OP07运放构成正向放大电路,R8、C1构成RC低通滤波器(如图3所示)降低系统产生的噪声.其电路截止频率,符合设计要求.
(4)A/D及MCU模块.滤波后的电压信号由OUT端(图3标识OUT端)送至MCU进行A/D采样,在MCU内部需将采样电压换算为光电二极管上产生的电流信号的大小.MCU控制电路分别对4路信号进行数据处理并将最终的数据(即由4路光纤采集的光信号转化而来的格雷码数据)通过无线模块传送至上位机.该系统的MCU选用的是Silicon Labs公司开发的完全集成的混合信号片上系统型MCU-C8051F310.

图3 传感反馈控制电路图Fig.3 Diagram of sensing feedback control circuit
(5)扫描信号的识别.扫描定位的时候,光纤传感器接收到的基于格雷码的结构光信号是明暗变换的,具有明显的二值特性.因此,传感控制器系统对光信号的变化识别采用较为简单的绝对判别法即可完成要求.扫描开始时,上位机先将横向和纵向扫描的图像幅数发送给传感控制器的MCU.第1幅扫描图像为全白图像,4路传感器的采集值存放在数组中;第2幅扫描图像为全黑图像,4路采集值存放在数组中.然后,依据绝对判别法分别计算得出4路信号的参考值.用数组表示,可写为:

以后每采集4路值,都要分别与扫描开始时各自确定的参考值进行比较,如果采集值大于其参考值则判为1,反之则为0;将得到的0、1代码存放在一个二维数组中.扫描结束后,通过无线传输的方式将该二维数组发送给上位机.
传感反馈系统的MCU软件流程,如图4所示.
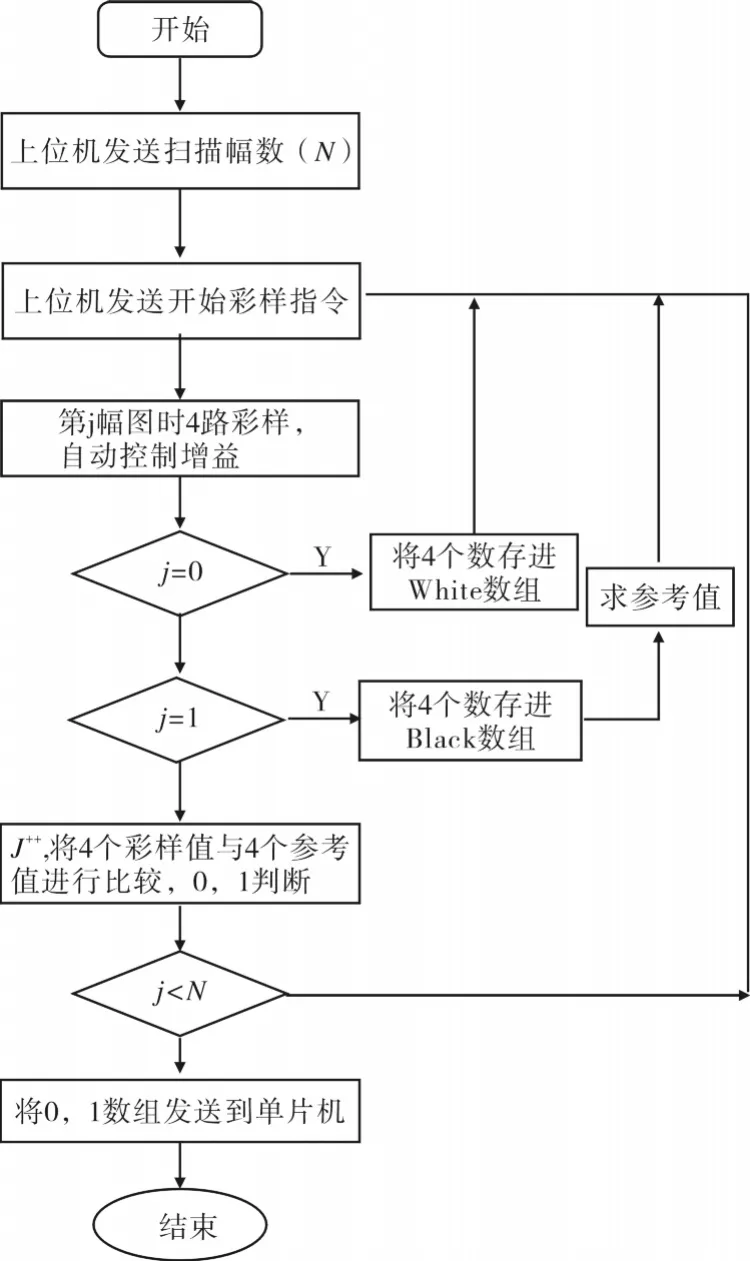
图4 MCU软件流程图Fig.4 Diagram of the MCU software process
2.2 扫描定位系统
2.2.1 基于格雷码的结构光模型
依据PC屏幕分辨率(如1024×768),纵向折半生成第1幅格雷码明暗图像,记为01(黑白).再在第1幅图像的基础上,依据格雷码变换生成第2幅图像0110(黑白白黑),以此类推生成log2N幅扫描图像(横向方向亦按照此规则生成扫描图像),生成图像经投影仪依次投射输出,即可产生格雷码编码的结构光[5,6].
2.2.2 扫描定位
如果投影仪未正对投影屏幕,在使用的过程中就会产生一个投影图像的梯形失真.对于图像梯形失真的数码校正,本文首先要确定投射目标的相对屏幕坐标位置,以此建立投影屏幕与投影仪间的透视关系模型.这一位置参数是实现数码校正的重要依据.以PC屏幕分辨率1024×768为例,其4个顶点的坐标分别为:(0,0),(1023,0),(0,767),(1023,767),当投影仪非正对屏幕时(如图5所示,Z为投影仪光源),原图像abcd经投影生成一个不规则的4边形a'b'c'd'.两幅图像各像素点成一一对应的关系.

图5 投影仪侧向摆放投影模型Fig.5 Projector placed lateral projection model
现将光纤传感器嵌入矩形投影屏幕4个顶点的背面,为了便于接收投影仪的光信号,光纤探头须露出少许.当启动投影扫描定位软件,基于格雷码的结构光序列扫描投影屏幕时,位于 a'、b'、c'、d'4 个顶点的传感器接收到信号,经过传感控制器处理反馈给PC.通过图6所示的模型可以看出,投影反馈后得到的投影屏幕相对电脑屏幕坐标为一个不规则矩形abcd.
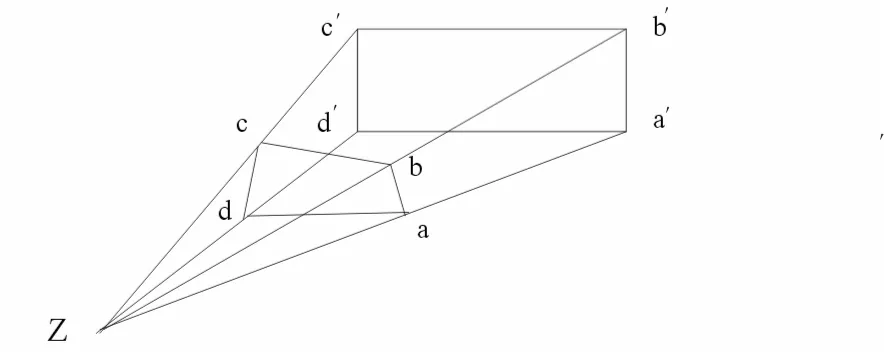
图6 投影定位的反馈模型Fig.6 Projection model for positioning feedback
经格雷码结构光序列扫描后,4个传感器顶点分别接收到横向扫描10个二进制数、纵向扫描10个二进制数,例如点 a'得到的数据为(1000010101,1111100010),转换成十进制数表示为(998,700).以此类推,即可确定其他几个点的相对电脑屏幕坐标.据理论推导,本文将原图的4个顶点(0,0),(1023,0),(0,767),(1023,767)按照扫描定位模块反馈回来的4个点坐标建立透视关系模型,以此对原图像进行梯形失真校正,再通过投影仪输出,即可实现图像的规整表示.
3 图像信息的处理
对于投影的梯形失真,通常人们只是做静态图像的校正处理,当投影画面为实时动态变化的时候,由于Windows系统的权限限制和基于Windows的窗口类结构要求,在本地校正显示图像须反复地切换PC桌面与显示窗口.由于此方法将导致无法正常投影,本系统采用了屏幕信息获取与校正显示相分离的处理办法,由 Client端和 Server端两部分完成相应工作.
(1)Client端.首先获取屏幕DC,在内存中生成与设备无关的32位hbitmap位图,剥离alpha通道转换为24位BMP内存位图.再将内存中的位图进行jpg编码压缩[7],采用 TCP/IP协议和 UDP协议发送内存数据给Server端.本模块采用了Intel的libjpg库对内存图像进行压缩,如表1所示,压缩速率较快,图像压缩效果好,可满足每秒24帧的人眼视觉要求.

表1 Client端图像压缩数据表Tab.1 Client side image compression table
(2)Server端
服务端工作由3部分完成:格雷码扫描定位、传感反馈通信与控制、图像数码校正与显示.当服务端接收到反馈的投射屏幕空间坐标,绑定本地IP端口,等待接收Client端发送来的jpg数据.如果收到数据,则在内存中进行图像的 jpg解码,还原成hbitmap位图,然后对其进行数码校正投影显示.解码工作同样也采用了Intel的libjpg库,如表2所示,解压速率也比较快,在局域网测试中达到了每秒24帧的最低视觉要求.

表2 Server端图像解压数据表Tab.2 Server side image decompression table
以上数据测试环境为:Windows XP系统、Intel I5处理器、2GB内存、GeForce 9800 GT显卡、320GB硬盘、1000Mbit/s局域网.
4 实验结果
依据投影定位模型的反馈坐标,通过空间变换和双线性内插法[8]对原图像进行数码校正后,本系统的部分实验结果如图7所示.

图7 投影校正仿真对比Fig.7 Comparison of simulation projection correction
图7(a)为水平梯形失真的投影图像,投影区域中放置了嵌入光纤的投影屏幕.图7(b)为校正后的投影输出图像,可以明显地看出校正后的图像能十分准确地投影在目标屏幕上.为了便于对比校正效果,图7(b)中对原投影失真图像的边缘部分用白色边框标记.
5 结语
本系统依据PC屏幕信息产生基于格雷码的结构光扫描投影目标,由嵌入的光纤传感系统探测反馈信息,为梯形失真的校正提供输入参数.测试结果表明:系统可在10s内完成精准定位,校正后的投影效果良好,能实现投影画面的流畅输出.系统定位误差为±2mm,校正范围为0~60°(投影仪镜头中轴线夹角).实验表明,本文设计的基于嵌入式光纤传感的投影图像梯形失真自动校正系统具有较强的环境适应性,能较为迅速的解决大尺度、高精度和动态显示的投影校正难题.projector[C]//IEEE.2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition(CVPR).Kauai(USA):IEEE,2001:II-504-II-508.
[1]Ramesh Raskar,Paul Beardsley. A self-correcting
[2]王 炜,包卫东.摄像反馈的投影仪畸变图像的自动校正[J].华东理工大学学报,2007,33(z1):1-5.
[3]龚 涵,陈浩宇.微弱光信号检测电路的设计与实现[J].机械与电子,2007(27):85-87.
[4]陈国杰,徐志民.基于ICL7650程控微电流放大器的设计[J].佛山科技学院学报,2001,19(4):8-10.
[5]张 超,杨华明,韩 成,等.基于格雷码结构光的编码研究[J].长春理工大学学报,2009,32(4):635-638.
[6]KIM Daesik,RYU Moonwook,LEE Sukhan.Antipodal gray codes for structured light[C]//IEEE.2008 IEEE International Conference on Robotics and Automation.Pasadena(USA):IEEE,2008:3016-3021.
[7]张元伟,刘彦隆.基于JPEG标准的静态图像压缩算法研究[J].电子设计工程,2010,18(2):78-80.
[8]田雄敏,沈庆宏,曹凤莲,等.基于图像空间变换和插值运算的投影仪校正算法[J].电子测量技术,2007,30(3):10-12.
