数控机床FANUC主轴驱动直流调速系统Simulink仿真分析
2011-01-25梁达平
梁达平
(天水师范学院工学院,甘肃天水741001)
1 引言
20世纪80年代以前的数控机床通常采用FANUC 6主轴驱动直流调速系统,目前国内相当多的生产企业仍在继续使用此类机床。超期服役使其处于故障多发期,维修频率逐年增加,其中出现主轴转速异常是较为常见的一种故障形式。本文利用Mat-Lab软件的Simulink平台建立FANUC 6主轴驱动直流调速系统的动态结构图及半实物仿真模型,可通过试测机床主要参数对调速系统动态性能指标进行快速校正,为解决FANUC 6主轴调速系统设计与维修问题提供了仿真平台。
2 系统动态结构图模型
FANUC 6主轴驱动直流调速系统是一种双环调速系统,内环为电流控制环,外环为速度控制环,对直流伺服电动机电枢进行调速,系统框图如图1所示[1]。
系统动态结构图如图2所示[2]。
传统的双环直流调速系统设计主要采用:由内环向外环,先定调节器结构,再选调节器参数,逐层整定的方法。该方法的优点是在手工操作的层面上尽量做到了简单易行,静态指标整定效果较好。缺点是没有充分利用计算机辅助功能,操作仍然过于繁琐;动态指标的设计需要不断测试拼凑,导致计算量庞大,过于依赖设计经验,设计周期较长。基于上述问题,采用Matlab软件中Simulink平台的强大仿真功能构建动态FANUC系统结构图模型,为解决动态参数设计及动态性能优化提供一个中间媒介。

图1 FANUC6主轴驱动直流调速系统

图2 双闭环系统动态结构图
3 Simulink动态结构图模型建立
根据图2的传递函数结构图在Simulink中建立动态结构图仿真模型如图3所示。
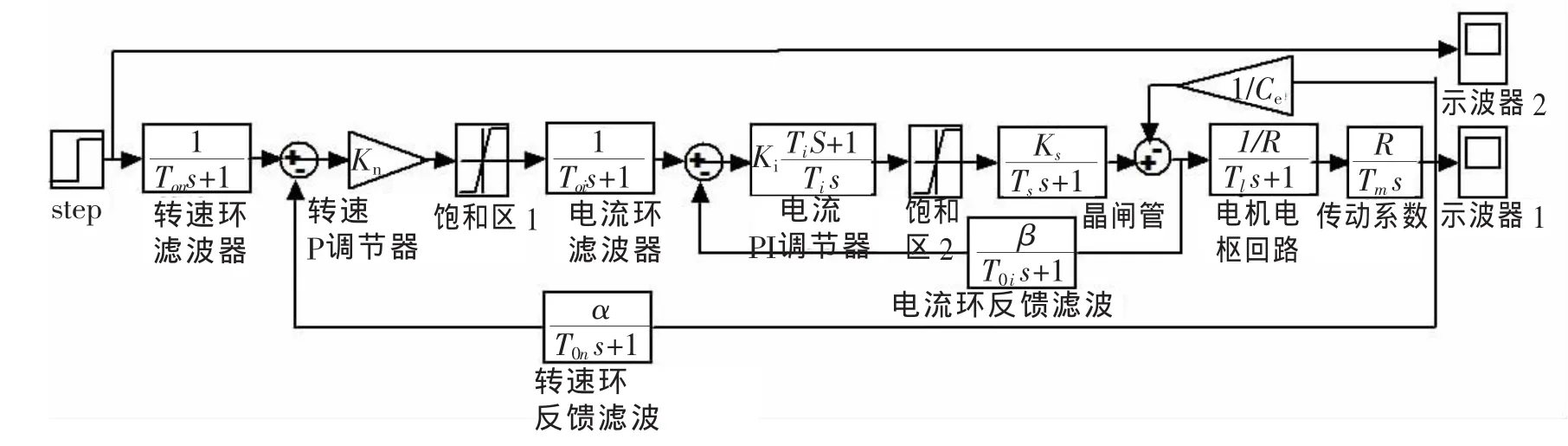
图3 双闭环系统Simulink动态结构图
由于Simulink的模块化装配的建模特点,使得工程中进行参数测试、调节非常的方便。只需要改动相应模块的参数配置就可以在示波器等信号显示集中看到即时的仿真结果,改变了传统控制系统设计流程中通过经验法试测校正系统参数的手工模式,大大提高了工作效率。图3中转速/电流环滤波器及反馈滤波器是将相应滤波环节产生滤波延迟仿真为一阶惯性环节,主要参数为时间常数Ton、Toi及反馈系数α、β;转速调节器ASR采用了比例调节器,参数为比例系数Kn;电流调节器ACR采用了比例积分调节器,参数为比例系数Ki和积分时间常数τi;电机电枢回路根据机理方程可建立一阶惯性环节的传递函数模型,主要参数为电枢回路总电阻R和电枢回路电磁时间常数Tl;传动系数为R和机电时间常数Tm;晶闸管装置具有放大和整流作用,因此也可建立为一阶惯性环节,参数为比例系数Ks和时间常数Ts。
基于Simulink平台的动态结构图模型具有参数调节快捷的优点,在工程设计中只需根据性能指标要求在预估范围内试测各项参数,就可以快速看到每一次变动对于输出带来的影响。下面将参数代入实例数据得到具体仿真模型如图4所示。
当输入负载转矩设为单位阶跃信号,模拟突然加入1N·m负载的工作状态时,电枢电流及转速输出时间曲线如图5如示。
图5中可以看出双环调速极大改善了电枢电流的工作状态,延长了大电流工作时间,提高了电机的加速能力,使电机输出能够快速调节到目标速度。

图4 参数设定后系统Simulink动态结构图

图5 动态结构图模型输出变量曲线
以上的结构图模型虽然在调试过程中大大降低了参数整定的工作量,但该模型从理论上仍属于传统双环直流调速系统设计模式,由于手工计算量的限制,在设计理论中已分别将相应的被控对象近似成一阶惯性环节或二阶振荡环节,来简化计算。而这种理论上的近似处理恰恰是造成动态性能指标不满意的重要原因,因此校正参数时与实际运行有较大的差距。此外,该模型中的参数大多属于中间变量,需要将给定性能指标进行较为繁琐的计算才能够得到,这就给实际工程设计中参数试测带来了极大的不便。为了改进上述两个缺点,可采用Simulink中的半实物化模块集Sim Power System来进行更为贴近实际工作状态的建模工作。这种将实际系统模型放在仿真系统中进行研究,被称为Hardware-in-the-loop,简称HIL[3]。
4 Sim Power Systems模型建立
Sim Power Systems模块集中提供了双环系统中重要的组件晶闸管模块、电动机模块等元件的精确模型,利用这些组件可以搭建出更为贴近实际状态的结构模型。如图6所示,直流电机选择了DC machine模块,一种对直流电机模仿更为真实的模型,不仅考虑了励磁回路和电枢回路,还模拟了互感过程、摩擦等非线性因素。晶闸管部分采用了Power Electronics集中的Thyristor模块,连接三相星形电源。晶闸管的脉冲触发器选择了Synchronized 6-Pulse Generator(同步六脉冲发生器模块)。转速调节器ASR和电流调节器ACR选择了PID Controller模块。
DC machine可输出电机的4个参数,包括最主要的电枢回路电流和转速,将它们接入示波器,可以得到如图7所示的输出曲线。
该曲线更为真实地反映了电机在调速过程中所完成的进饱和(电流Idl上升),饱和(电流Idl恒定升速),退饱和(电流Idl下降、转速调节)三个阶段的调速过程,体现出饱和非线性因素的影响。当然,该模型在工程实际中进行参数试测整定将比动态结构模型更加快捷,因为其参数全部采用的是实际生产设备性能指标,无须经过前期计算获得中间变量之后,再进行仿真。
5 结论
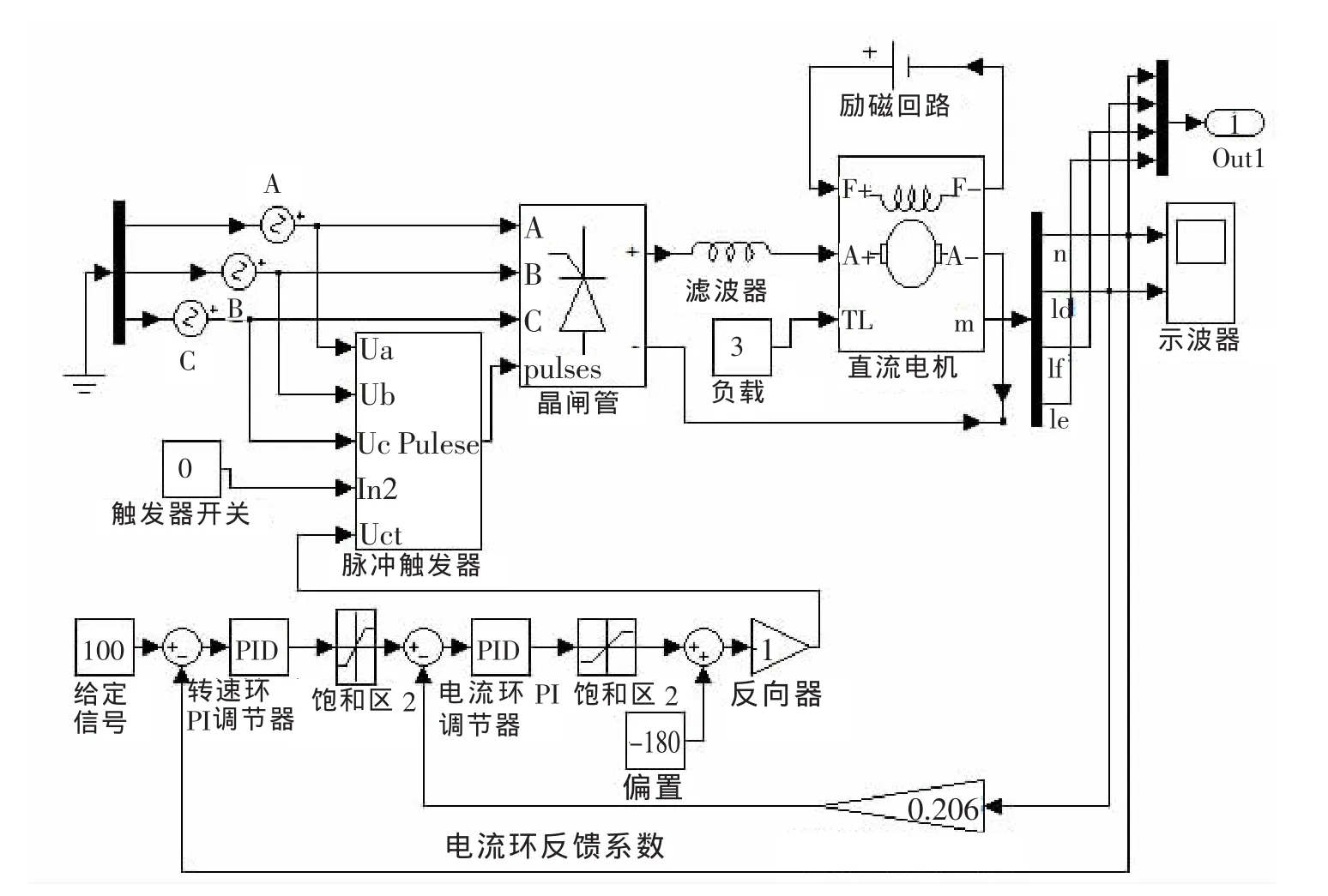
图6 Sim Power System半实物仿真模型

图7 Sim Power System半实物仿真模型输出曲线
本文建立了FANUC 6主轴驱动双环直流调速系统仿真模型,分析了系统相关参数与主要性能指标的关系。使工程人员能够通过简单试测调速系统参数值,就可立即得到性能仿真结果,为实际工程设计和系统维修提供了快速、理想的参数整定试算平台。与传统设计模式相结合,可以达到辅助动态性能校正及结果验证的目的,提高了设计效率,降低了设计成本。文中建立的仿真平台具有良好的可扩充性,也可用在基于调速系统的其它各类专题性研究中。
[1]徐西艳.JCS_018机床直流调速系统故障的分析与处理[J].机械,2001(3):66-67.
[2]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,1992.
[3]薛定宇.控制系统仿真与计算机辅助设计[M].北京:机械工业出版社,2006.
