基于GPS/DR 的车辆定位系统的研究
2010-12-08张慧宁
张慧宁,高 杨
(黄河水利职业技术学院,河南 开封 475004)
0 引言
对于车载定位导航系统而言,获得车辆的精确定位是最基本的要求。 在城市路段复杂的情况下,往往会出现高楼和高架桥阻挡接收机的信号,使定位信息有较大的偏差甚至失去信号,从而难以满足车辆定位的需要。 全球定位系统/航位推算系统(GPS/DR) 的组合定位系统是由这两个相互独立的子系统构成的多传感器系统。 在该系统中,采用的多传感器信息融合技术可以扩展整个系统的时间和空间覆盖率,增加系统的信息利用率,提高融合数据的置信度和精度,增强系统的容错性和可靠性。GPS/DR 组合定位可实现的功能为:(1)当GPS 丢失信号时,根据丢失信号前的位置信息、传感器输出的速度和航向信息,应用航位推算对GPS 系统进行补充;(2)当GPS 系统恢复工作时,对DR 航迹推算系统的误差进行实时的校正和补偿,有效提高车辆的定位精度[1]。
1 GPS/DR 组合的卡尔曼滤波器的设计
在多传感器系统中,联合卡尔曼滤波器利用信息分配原理,能够实现多传感器信息的最优综合,并且使整个系统具有一定的容错能力,从而能够获得整体上最优的性能[2]。 将联合卡尔曼滤波技术应用于车载GPS/DR 组合定位系统,能够实现定位导航信息的最优综合及相互校正。
1.1 结构设计
要实现GPS/DR 组合定位系统的定位信息最优融合,关键是建立其滤波模型[3~4](如图1 所示)。

图1 联合卡尔曼滤波结构图Fig. 1 Joint Kalman Filter structure
1.2 系统信息分配原理
GPS/DR 组合定位系统的整体状态变量取Xg=[e,ve,ae,n,vn,an]。 其中,e,ve,ae,n,vn,an分别是车辆的东向和北向位置坐标、速度、加速度。 此处采用机动载体的“当前”统计模型。
1.2.1 GPS 局部滤波器的状态方程和量测方程
取系统的状态变量,状态方程与总体状态方程相同。 GPS 的观测选车辆东向坐标分量(单位:m)和北向坐标分量(单位:m),于是观测方程可写为

式中: ve(k)和vn(k)是GPS 接收机东向和北向的位置测量噪声,分别为(0,σ12)和(0,σ22)的高斯白噪声。量测噪声协方差矩阵为:


1.2.2 DR 局部滤波器的状态方程和量测方程
取系统的状态变量X2=Xg,状态方程与总体状态方程相同。 速度陀螺仪输出为车辆航向的变化率,即角速度ω(单位:o/s)和里程表在采样周期T 内的输出距离s(单位:m)为外观测量,建立的系统量测方程为
式中:g 为常数(里程表的标定系数);T 为采样周期;φe、φn分别是速度陀螺仪和里程表的测量误差,分别取为(0,δω2)和(0,δs2)的高斯白噪声。
系统量测方程为非线性方程

式中: vω为角速率陀螺随机漂移中的高斯白噪声分量(0,δω2);vs为里程计的量测噪声,是(0,δs2)的高斯白噪声。

式中:h[t,X(t)]为非线性函数,Z(t)=[ω,s]T,V(t)=[φe,φn]T,则

由于量测方程为非线性方程,在应用卡尔曼滤波算法进行估计时,需要进行线性化处理。 为方便起见,先离散化
方程(7)可表示为:

其中:

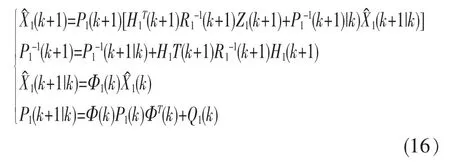
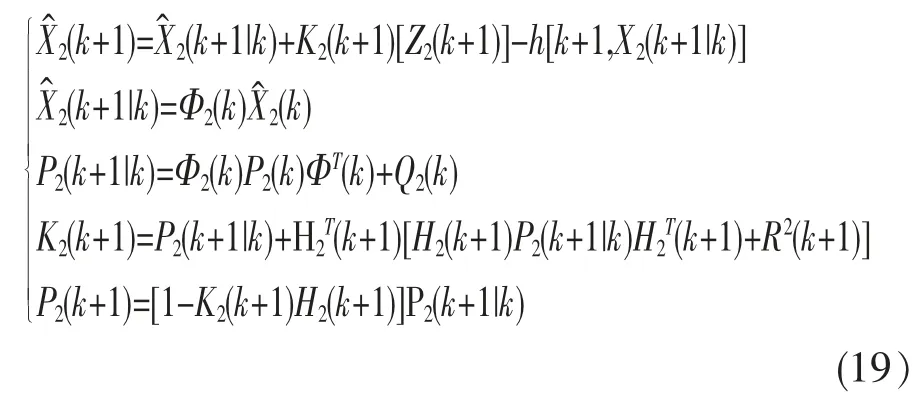
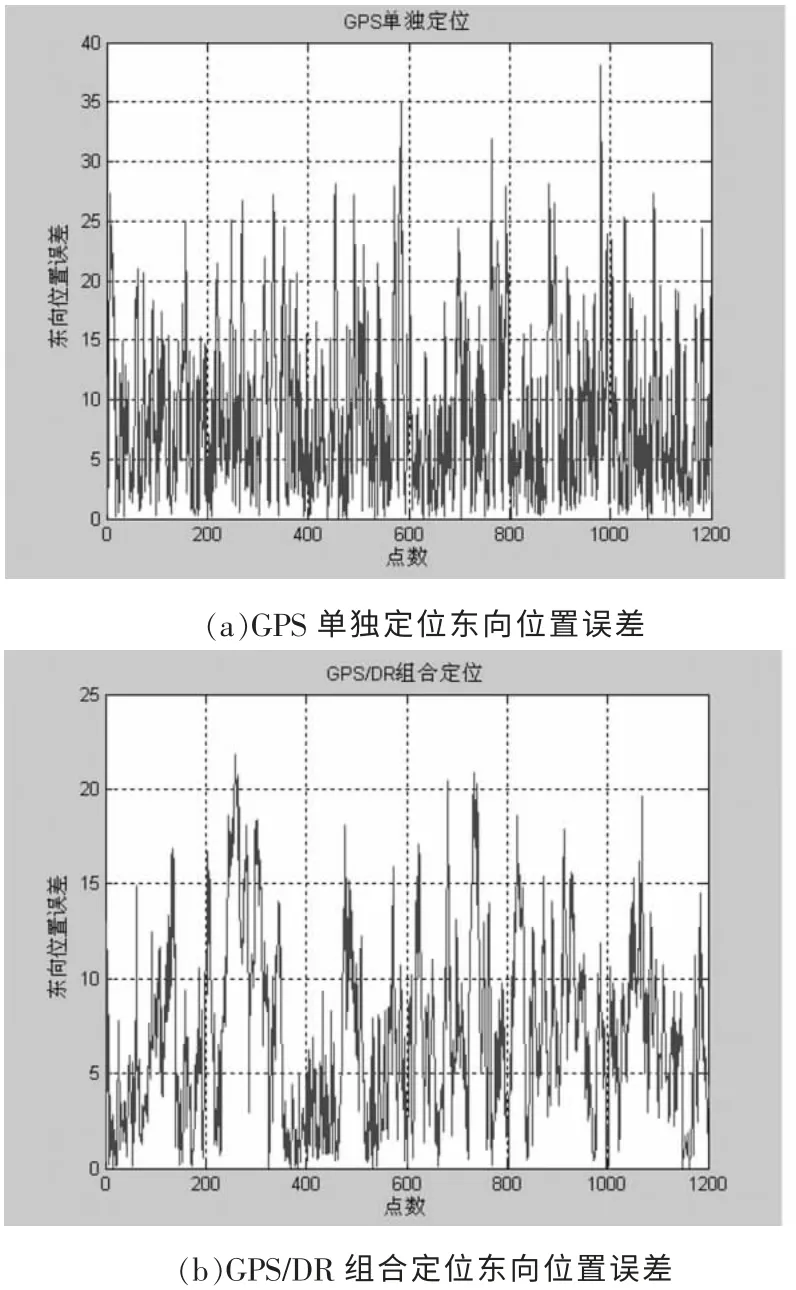
由式(12)可以看出,量测量和系统状态变量之间为非线性关系,利用EKF 对其进行线性化近似,将h[k,X 可得 采用机动载体的“当前”统计模型,根据建立的状态方程和量测方程,可得: (1)GPS 局部卡尔曼滤波器1 模型为 其算法为 信息分配: (2)DR 局部卡尔曼滤波器2 是对应DR 系统的扩展卡尔曼滤波器,模型为 其算法为 信息分配: (3)GPS/DR 系统整体状态的最优综合为 信息分配系数β1和β2应满足β1+β2=1。 在联合卡尔曼滤波器中,对应各局部滤波器和主滤波器的信息分配系数的取值决定着联合卡尔曼滤波器的性能[6]。 因此,对于GPS/DR 组合定位系统的联合卡尔曼滤波器,可以通过选择不同的信息分配系数β1,β2来改变滤波器的性能,以满足不同的需要。 根据信息分配原理,β1+β2=1,当β1→0,局部滤波器1 的状态估计输出X1对整体状态输出Xg的影响最小。 同理,当β2→0 时,局部滤波器2 的状态估计输出X2对整体状态输出Xg的影响最小。 而在实际滤波算法中,不能取β1=0 或β2=0,否则将会出现发散,但可根据需要使β1或β2尽可能取小值。 经过大量的计算机仿真可以发现,当取β1=β2=0.5时,联合卡尔曼滤波器的整体输出Xg具有最好的估计精度。 若β1>0.5,β2<0.5,则滤波器的整体输出在性能上以局部滤波器1 为主,且β1越大,局部滤波器1 的输出X1所占的比重越大,亦即整个联合卡尔曼滤波器的性能越接近局部滤波器1。 反之,若β1越小,整个联合卡尔曼滤波器在性能上越接近局部滤波器2。 在市区,由于遮挡等原因,使GPS 定位系统不能正常定位或定位精度较差时,可取β1≈0,β2≈1,使联合卡尔曼滤波器的整体状态输出近似为局部滤波器2,即DR 系统的输出。 在GPS 能正常工作、定位精度较高时,取β1=β2=0.5,使得联合卡尔曼滤波器的整体输出具有较好的综合性能,即获得较高的定位精度和容错能力。 一般可根据GPS 接收机输出的反映定位精度的参数来对β1,β2的取值进行自动调节。 例如,Position 公司出品的GSU-36 型GPS接收模块, 定位精度完全由PDOP 反映, 可根据PDOP 的大小,决定β1的取值。 β1,β2的自适应算法为: 为了验证GPS/DR 组合定位技术的有效性,利用ArcView 下的兰州市区矢量化地图,在MATLAB环境下,对各定位方法进行了仿真试验。 试验结果如图2 和图3 所示。 由图2 和图3 得知:GPS 单独定位东向位置在40 m 内, 且大部分点的误差在30 m 内;GPS/DR 组合定位东向位置误差在25 m 内,且大部分点的误差在15 m 内,东向位置最大误差为23.16 m,最小误差为0.02 m。 表1 为GPS 单独定位和GPS/DR 组合定位的数据分析。 图2 GPS 单独定位和GPS/DR 组合定位比较Fig.2 Comparison of separate GPS positioning and GPS/DR integrated positioning 图3 GPS 单独定位和GPS/DR组合定位东向位置误差比较Fig.3 East position error comparison of separate GPS positioning and GPS/DR integrated positioning 表1 GPS 单独定位和GPS/DR 组合定位的比较Table 1 Comparison of separate GPS positioning and GPS/DR integrated positioning 由表1 可以看出,GPS/DR 组合定位系统的定位精度高于GPS 单独定位系统,且定位轨迹东向、北向位置的标准差均小于GPS 定位系统的位置标准差,从而能正确地反映车辆的行驶路线,提高对车辆航线的跟踪质量。 但是,在有些路段拐弯处或多路段交叉时,还不能正确显示车辆的位置。 本文研究的GPS/DR 组合定位系统可有效地解决GPS 定位不连续和DR 定位累积误差大的缺陷,极大地提高定位系统的定位精度和工作的可靠性,是处理车辆组合导航系统信息融合问题的有效方法。为了能够满足车辆行驶的动态特性,优化滤波器结构和信息分配系数,以确保滤波效果,仍是有待进一步解决的问题。 [1] 赵亦林. 车辆定位与导航系统[M]. 北京:电子工业出版社,1997:50-54. [2] 王志刚. 车载导航GPS/DR/MM 组合定位技术的研究[D].武汉:武汉大学,2005. [3] 万德钧,房建成,王庆. GPS 动态滤波的理论、方法及其应用[M]. 南京:东南大学出版社,2000: 30-38. [4] 彭飞. 智能车辆定位与导航系统[D]. 北京:北京航空航天大学,2000. [5] 房建成,申功勋. 车载DR 系统自适应扩展卡尔曼滤波模型的建立及仿真研究[J]. 中国惯性技术学报,1998,6(3):24-28. [6] 史庆峰. 车载组合定位系统的研究[D]. 长春:吉林大学硕士论文,2005. [责任编辑 杨明庆]

1.3 GPS/DR 组合定位系统的联合卡尔曼滤波算法





2 确定GPS/DR 组合定位信息分配系数
2.1 系统信息分配系数对滤波器性能的影响
2.2 β1、β2 的算法
3 仿真试验


4 结语
