模糊PID控制在双闭环直流调速系统中的应用研究
2010-09-20董子文朱张青
董子文 朱张青
(南京大学控制科学与工程系,南京 210093)
0 引言
目前,工业自动化水平已成为衡量各行各业现代化水平的一个重要标志,经典PID(比例-积分-微分)控制器仍然是应用最广泛的工业控制器。随着现代控制技术的发展,传统PID控制方法已难以满足控制指标的要求[1]。主要表现为:采用离线调节,难以在线调整控制参数,动态特性不太理想;不具有自适应控制能力;对时变、非线性系统控制效果不佳。而模糊控制是以模糊数学为理论基础,根据实测数据或工程经验概括抽象成一系列模糊规则,并借助计算机来完成控制的方法,由于模糊控制具有一系列的优点,因此有着良好的应用前景。
本文将常规PID控制和模糊控制结合起来,设计了两种模糊PID控制器并将其运用到双闭环直流控制系统中,通过运用Matlab对其进行了仿真研究,得到了模糊PID控制在双闭环直流控制应用中具有响应速度快、鲁棒性强以及不依赖被控对象数学模型的优点。同时,通过分析设计的两种控制器的各自特点,给出了它们适合的应用环境。
1 模糊PID控制器
作为智能控制的一个重要分支,模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机控制方法,在控制领域获得了广泛应用[2]。
常规模糊控制的输入一般是系统的偏差以及偏差的导数,与常规PID控制中的比例环节(P)和微分环节(D)的作用类似,根据经典的控制理论知道,纯粹的PD控制是有静差的控制,解决的方法是增加积分环节(I)以减少系统稳定时静差。同理,可以将这种思想运用到改进常规模糊控制的问题上,这样产生了两种不同模糊PID控制方法。
1.1 常规模糊控制+积分环节(I)控制
在原有模糊控制中直接加入积分环节,形成模糊-PID混合控制策略,给出混合控制系统的结构如图(1)所示。
1.2 分段模糊PID控制
PID调节器的积分调节作用可使系统的稳态误差为0,有很好的消除稳态误差的作用。因此也可以将模糊控制和PID控制相结合,即当误差在某一个阈值以外时,采用模糊控制,以获得良好的瞬态性能;而当误差落到阈值以内时,则采用PID控制,以获得良好的稳态性能。这种模糊与PID两种控制模式相结合的控制方法又被称之为Fuzzy-PID双模控制,其结构图如图(2)所示。
2 模糊PID控制在双闭环直流调速系统上的运用
2.1 直流电动机双闭环调速系统的原理
转速和电流双闭环直流调速系统是典型的直流电动机调速系统。系统的结构原理如图3所示。
图中:ASR(S)为转速调节器传递函数;ACR(s)为电流调节器传递函数;Ton为转速反馈时间常数;Toi为电流反馈时间常数;Ts为三相桥式电路平均失控时间;Tl为电磁时间常数;Tm为机电时间常数;Ce为电动机电动势常数;Ks为晶闸管装置放大系数;R为电枢回路总电阻;afa为转速反馈系数;beita为电流反馈系数;TL为负载转距;Un为给定转速输入;n为输出反馈转速;Ui为给定电流调节器输入信号;Id为电枢电流。
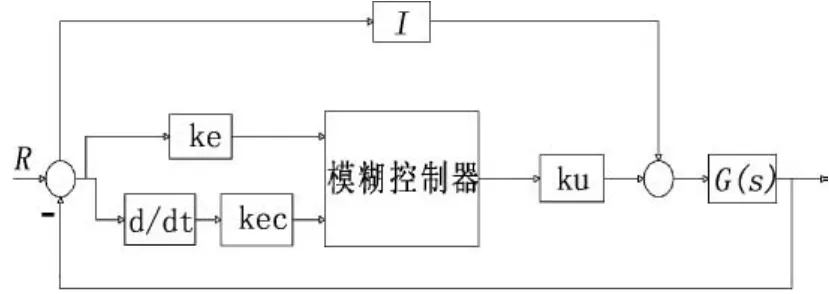
图1 模糊-PID混合控制器

图2 分段模糊PID控制器
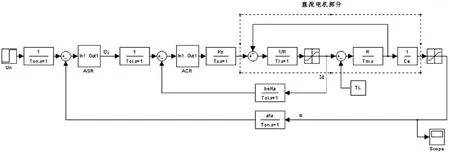
图3 直流双闭环调速系统
双闭环直流调速系统的特点是电动机的转速和电流分别由两个独立的调节器控制,而且转速调节器的输出Ui就是电流调节器的给定。电流环能够随转速的偏差调节电动机电枢的电流Id。电流内环的作用是使电枢电流Id服从其给定值Ui,Ui不变时,它表现为恒流调节,否则表现为随动调节。当转速低于给定转速时,ASR的积分作用使输出增加。电流给定上升,并通过电流环调节使电枢电流Id增加,电动机获得加速转矩,电动机转速上升;当实际转速高于给定转速时,ASR的输出减小,即电流给定减小,并通过电流环调节使电枢电流下降,电动机的电磁转矩减小,从而转速下降[3]。
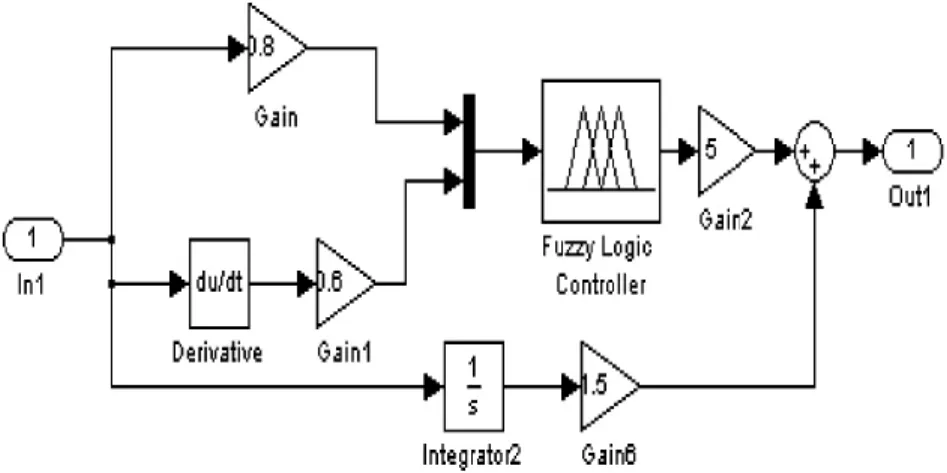
图4 模糊-PID混合控制器
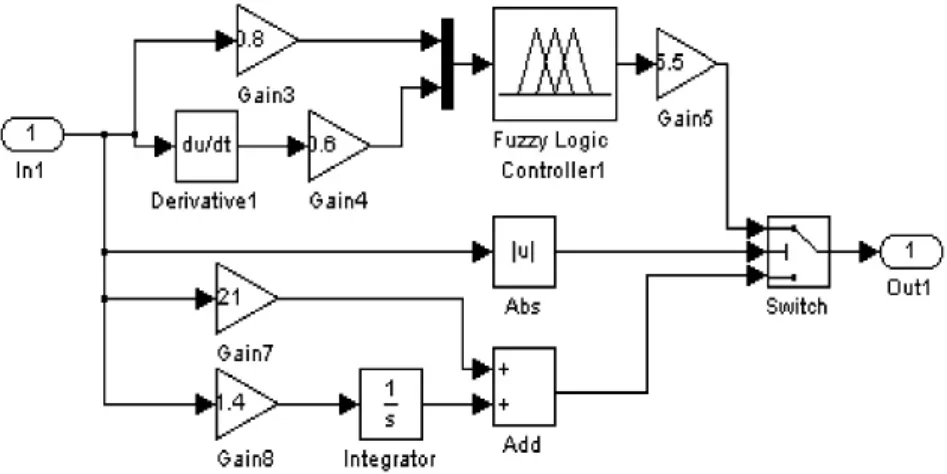
图5 分段模糊PID控制器
2.2 运用模糊PID控制的直流电动机双闭环调速系统的仿真
传统的直流电动机双闭环调速系统中ASR和ACR多采用结构简单、性能稳定的带限幅的PI调节控制器。在实际生产现场,由于各种因素,如控制系统的传递函数与实际有偏差;电机本身的参数和拖动负载的参数(如转动惯量)并不如模型那样不可变化,在某些应用场合会随工况而变化;同时,电机本身是一个非线性的被控对象,许多拖动负载含有弹性或间隙等非线性因素[4]。因此被控制对象的参数变化与非线性特性,使得PI控制器的参数往往难以达到最优状态,而且控制参数难以跟随现场的动态变化。由于模糊控制不需要精确的数学模型,能够根据日常生产中的经验规则动态地输出,因此可以运用模糊PID控制方法来改进控制方案。
ASR环节分别采用上面介绍的模糊-PID混合控制器和分段模糊PID控制器,如下:
E、EC和 U的论域分别为:[-6,6]、[-400,400]、[-50,50];
设置E、EC和U均服从高斯隶属函数曲线分布。
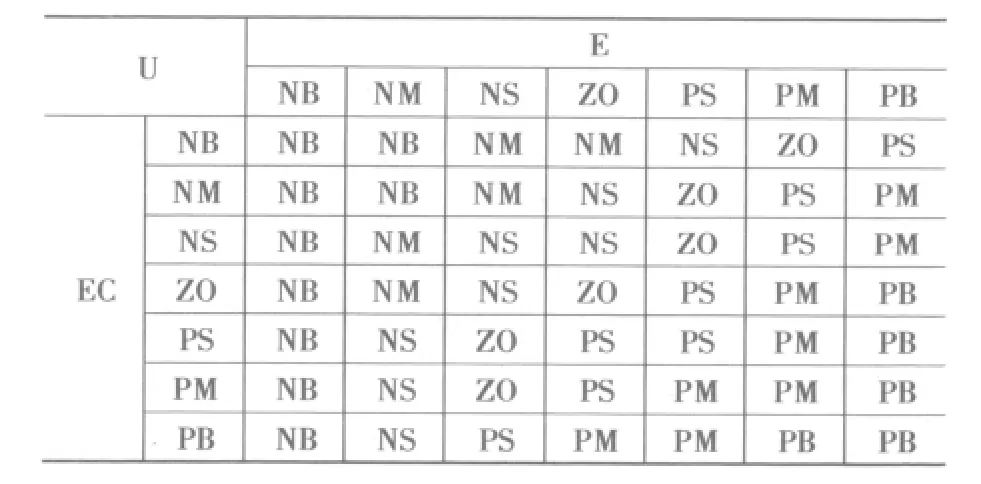
表1 模糊控制规则表
根据控制经验,可得针对E、EC、U三个参数的模糊控制规则表,如下表1所示。
在仿真中,设电机的参数为:Toi=0.002,Ton=0.01,Ts=0.0018,Tl=0.03 ,Ce=0.132 ,Tm=0.18,Ks=40,afa=0.007,beita=0.05,R=0.5。
3 仿真结果及分析
3.1 仿真结果
在MATLAB中将模糊PID控制器以及分段模糊PID控制器与常规PID控制器对比仿真。仿真中,在0.55s时加入了一个负载扰动,得双闭环系统响应结果如图6所示:
图中曲线(1)为模糊PID混合控制的响应曲线,曲线(2)为分段模糊PID的响应曲线,曲线(3)为对比的常规PID的响应曲线
从仿真结果可知:在电枢电流响应曲线的上升过程中,分段模糊PID控制的响应速度最快;模糊PID混合控制次之;常规PID控制最慢。电枢电流的超调量最小的是模糊PID混合控制;分段模糊PID的超调量最大;常规PID居中。而在电枢电流的下降阶段,则是常规PID控制的动态性能最差,上下波动很大。从转速方面来看,分段模糊PID的转速响应上升最快;模糊PID混合控制的响应速度次之;常规PID控制的响应最慢。另外,采用了模糊PID混合控制时几乎没有转速超调,而分段模糊PID和常规PID控制都有超调,且常规PID控制的超调量较大。
在动态响应的仿真过程中加入了转距扰动,从图6可知:三种控制器的转速变化过程是一致的,而电枢电流的动态响应过程则有所不同:常规PID控制的动态响应的超调量非常明显;而采用模糊PID和分段模糊PID混合控制的系统响应过程则近似,都具有动态响应时间短且无超调的优点。
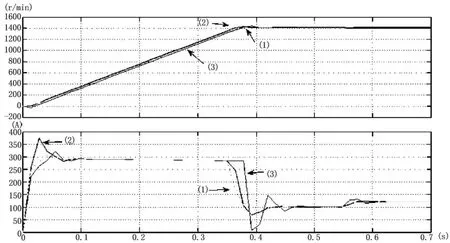
图6 上图为电机转速响应图,下图为电机电枢电流响应图
3.2 两种模糊PID控制器的对比分析
根据两种模糊PID控制器的原理分析可知:两种改进后的模糊控制器都能较好解决系统稳定响应有静差问题。进一步通过对比仿真可知,两种模糊控制器都各具特点:(1)从阶跃响应时的动态性能上:分段模糊PID控制由于结合了模糊控制器的响应速度快和常规PID控制无静差控制的优点,因而动态性能优于模糊-PID混合控制。(2)从两种控制器的设计来看,模糊-PID混合控制器设计较分段模糊PID控制器简单,原因主要有以下两点:一是模糊-PID混合控制器结构主要由模糊控制和积分环节两部分组成,而分段模糊PID控制器则是由模糊控制、PID控制和阈值选择开关三部分组成,控制环节的增多必然会导致设计上更加复杂,硬件上设备更加庞大;二是分段模糊PID控制器设计时需要调节的参数要多于模糊-PID混合控制器,除了模糊环节和积分环节参数同样需要调节外,比例系数,微分系数以及阈值都需要调节,因而在参数调整上需要花费更多时间,使得分段模糊PID控制器设计更加复杂。(3)分段模糊PID控制器有阈值选择开关,在阈值开关转换的过程中容易造成响应的波动,在仿真响应图中就显示出电枢电流在达到稳定值前分段模糊PID控制器因为有控制策略的转换而有一个较大的超调量,因而在设计时需特别注意,这样也使得分段模糊PID控制器的设计更为复杂。
通过以上的分析,可以得出两种模糊PID控制的应用环境。分段模糊PID控制适合运用于科研或者对控制性能要求高而对设计成本无严格要求的控制场合中;而在本例即应用于直流双闭环调速系统中时,采用模糊PID混合控制则可以较好地改进常规PID控制,从而改进控制效果,并且能够有效地控制设计时的成本。
4 结束语
通过将两种模糊PID控制应用到直流双闭环调速系统中的仿真研究,可以得出模糊PID控制具有响应速度快、动态性能好、鲁棒性强以及设计控制器时不依赖被控对象精确的数学模型的优点,同时进一步分析出了两种模糊PID控制适合的应用环境。
模糊PID控制是一门新兴的智能控制技术[5],如果能将其加以合理的运用,一定能使其发挥巨大的作用。
[1]贾东耀,曾智刚.基于模糊控制的直流电机调速系统MATLAB仿真[J].电机电器技术,2002.5.
[2]张国良,曾静等.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002.
[3]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,1999.
[4]韩璐.直流电动机双闭环调速系统及其SIMULINK的仿真[J].船海工程,2003.2
[5]曾令美,关军明.基于模糊控制的双闭环直流调速系统控制器设计研究[J].计算机与现代化,2006.5