医用气动物流传输系统终端站点设计
2010-09-20陈维威唐厚君徐振胤
陈维威 唐厚君 徐振胤 杨 帆
(上海交通大学,上海 200240)
0 引言
世界许多发达国家和地区在很早就开始研制物流传输系统,相关技术已经较为成熟,系统应用领域广泛,种类齐全。在医用领域中,截至20世纪末,欧洲就有超过1万套物流传输系统在使用,日本也有3000家以上的医院装备有物流传输系统。
现阶段我国大部分医院物流发展的现状仍然是“专职递送队伍+多部电梯”,这样的物流传输方式有着严重的弊端:人流与物流混在一起,病人和职工在电梯楼上楼下跑动,多处排队等候,浪费时间,增大医护人员工作量,同时还增加了交叉感染或疾病传播的危险性。
本设计主要实现除PC上位机外的所有终端机械设备的电气控制部分软硬件控制电路的设计,实现整个系统的底层软硬件控制设计。
该物流传输系统电机驱动模块采用MC系列为主要驱动芯片,该芯片具有电流采样的功能,可以实现电机的过流保护和转矩调节。
单片机通过控制MC系列驱动芯片,能输出24V的电压,最大
1 系统结构设计
图1为物流传输系统中工作站电气结构硬件框图,其主要功能包括电机控制,传感器信号检测,上下位机通信,以及液晶显示等。
该物流传输系统选用Freescale公司的单片机MC9S系列作为主控芯片,控制思路为通过CAN通信接收上位机的指令,控制机械设备中指定的电机进行动作,然后根据传感器信号判断动作执行情况并向上位机返回相应的状态信号。
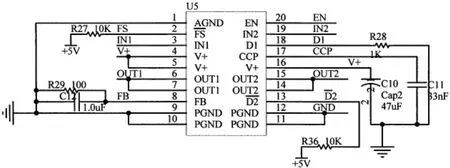
图2 电机驱动电路
1.1 电机控制功能模块
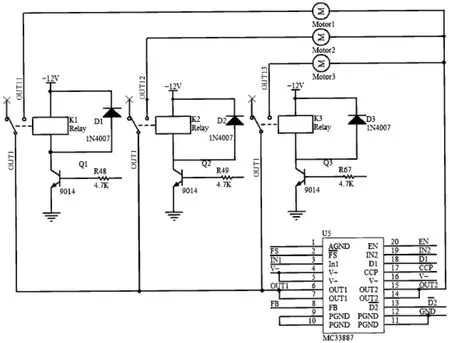
图3 多路电机控制原理图
工作电流可达7A,该系统根据要求需要控制多路电机动作,为了节约芯片,根据实际需要搭配继电器控制电路,实现一块驱动芯片分别驱动多个电机的功能。原理图如图3所示:
1.2 传感器信号检测功能模块
该物流传输系统通过检测传感器的信号确定传输物的具体位置以及电机的动作情况,并同时进行信号处理。传感器模块主要包括传感器接口电路和传感器控制电路两部分,如图4和图5所示。接口电路为传感器提供电源并调理传感器输出信号;控制电路以PCF系列为核心芯片,将各路光电传感器的开关量输出信号通过IIC总线传送给单片机。通过PCF系列极大地扩充了单片机能够处理传感器的数量,提高系统的准确性。
1.3 上位机通信功能模块
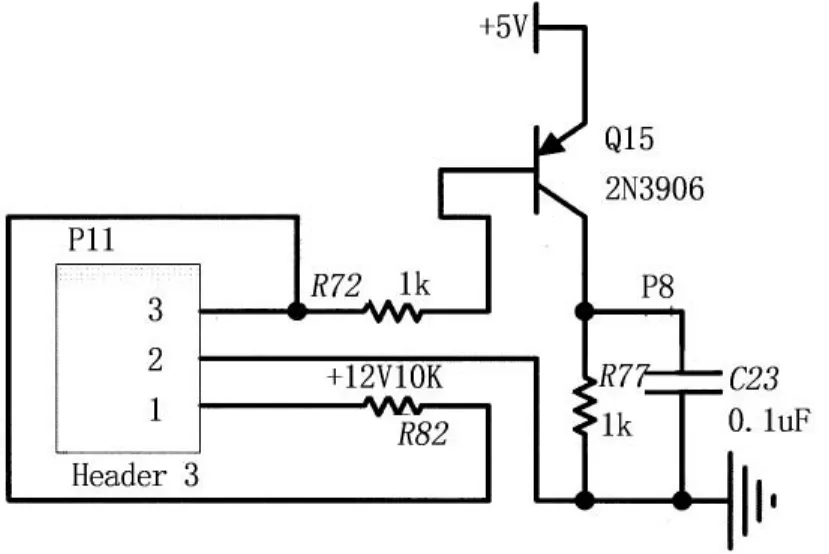
图4 传感器接口电路
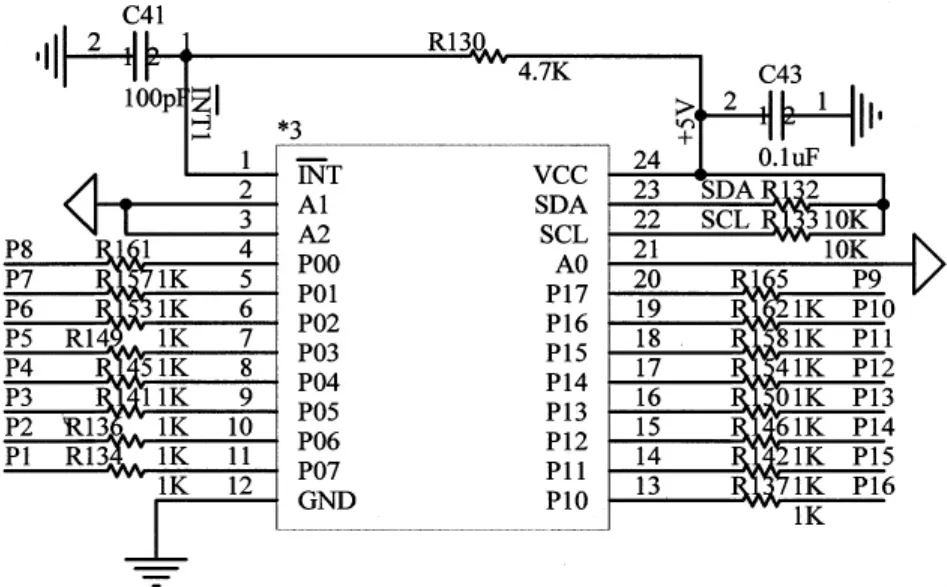
图5 传感器控制电路
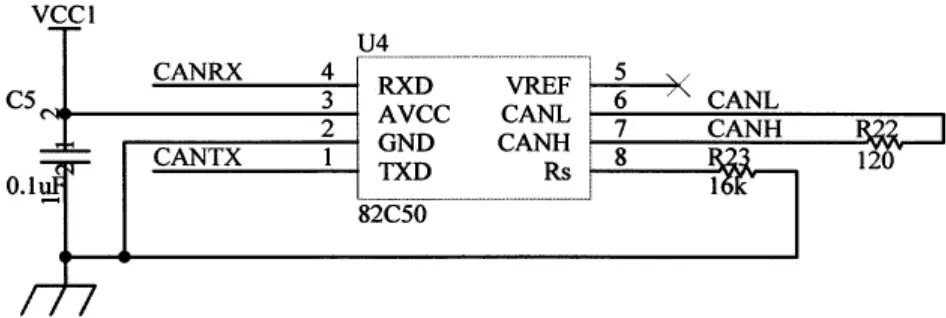
图6 CAN通信总线驱动电路
该物流传输系统通过CAN通信实现上位机能够控制机械设备以及查询传输物品当前位置的功能。CAN通信采用MC9S系列自带的CAN模块,通过光耦隔离后,配合PHILIPS公司的高速总线驱动器82C50,该总线驱动器采用双线差分驱动,抗干扰强,实现与上位机通信。同时,为了使系统更加稳定,采用了隔离电源A0505对82C50进行单独供电。同时在CAN总线两端接入120欧的匹配电阻,以消除阻抗不连续时的反射现象,总线与地各自并联一个小电容,以防电磁辐射和抗高频干扰。CAN通信总线驱动电路如图6所示。
2 反馈PWM控制设计
当输入电压发生波动或需要切换电压控制电机转速的过程中,开环控制下的电机转速容易受到影响出现波动。对于电机转速稳定性要求较高的情况,为实现电机转速稳定,有必要对电压实现反馈控制。由于系统工作时瞬时电压信号容易受到干扰,而电压有效值信号尽管计算量稍大,但是较为稳定。本设计中,处理器的计算能力能够满足控制系统需求。为此提出一种以输出采样电压有效值为反馈信号,调节PWM信号占空比的控制方案,控制系统结构如图7所示。
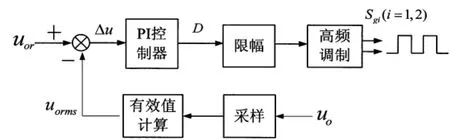
图7 电机反馈控制结构图
实际输出电压信号uo经过采样和有效值计算环节后,得到反馈电压有效值uorms。给定参考输出电压uor与实际输出电压反馈信号uorms比较后得到输出电压偏差量Δu,经过PI控制器后得到占空比反馈控制信号D(t):
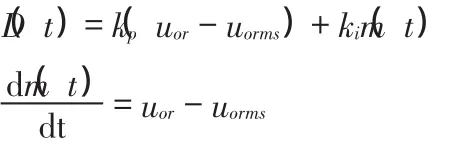
输出占空比信号经过高频调制和分配控制后,得到PWM控制信号,从而控制电机控制芯片相应引脚。
3 CAN通信设计
CAN(controller area network,又称控制器局域网)总线除了具备现场总线的开放式、互操作性、数字化通讯等特征外,还具有以下特征:(1)以多主机方式工作;(2)CAN上的节点信息分不同的优先级,可满足不同的实时要求;(3)采用非破坏性总线仲裁技能,节省了总线冲突仲裁时间;(4)采用短帧结构,传输时间短,受干扰率降低,具有极好的检错效果;(5)每帧信息都有crc校验及其它纠错功能,数据出错率极低;(6)通信介质可灵活地挑选;(7)CAN上的节点数高达110个;(8)有很高的可靠性和性能价格比等。图8所示为CAN总线通信协议分层结构。
选定CAN作为通信方案后,制定了与上位机之间相应的通信信息格式,以此确定各种机械动作。图9为风机转换器命令信息格式。
图10为单片机进行CAN通信动作流程图。
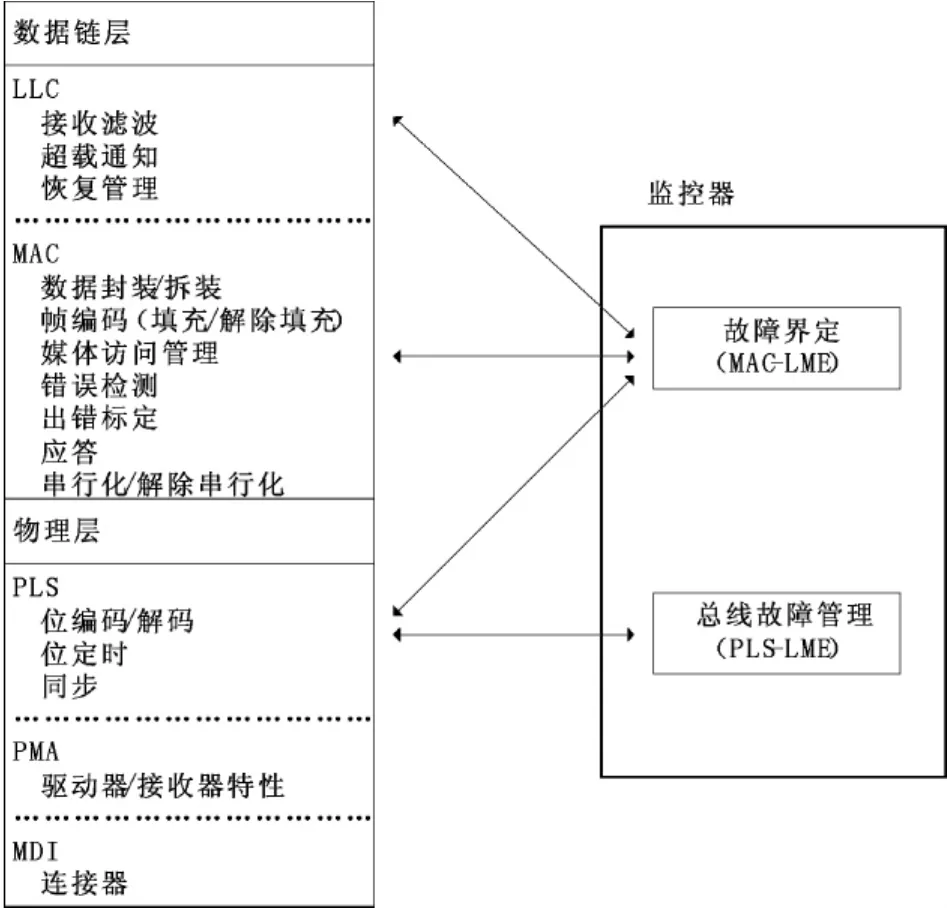
图8 CAN分层结构
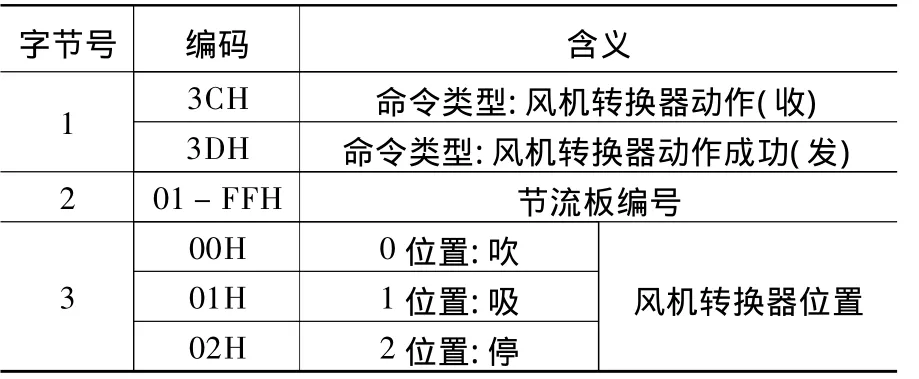
图9 风机转换器命令
4 实验样机设计
在原理分析与建模基础上,设计了MC9S系列处理器为核心的实验样机。其组成结构如图11所示:
该样机由六部分组成:传感器模块,检测电机动作信号和信号调理;MC9S系列处理器是控制系统的核心,检测的电机电压信号经过内部AD采样,转化为数字量。通过执行控制算法,得到PWM信号的占空比值;电机驱动电路模块将单片机输出的PWM信号转换成为电机开关的驱动信号;保护模块在过压、过流和过热情况下封锁单片机发出的PWM信号,并提示错误类型;通信模块,实现单片机与上位机通信。
5 结论
医用气动管道物流传输系统涉及到的技术领域非常多,包括空气动力学,机械传动,机械制造,传感器,电气控制,电路设计,通信,软件编程等等,本文基于MC9S系列处理器的基础上实现了物流系统电气方面的硬件结构设计,通过检测电机电压电流进行闭环控制,有效的控制电机进行平滑动作,保证系统稳定性;在IIC通信实验中调整匹配电阻,解决了IIC工作不稳定的问题;在实现系统各个功能基础上,添加了保护电路,确保在单个芯片发生故障时整个电路的安全性。仿真与实验结果,验证了所提出设计方案的有效性。
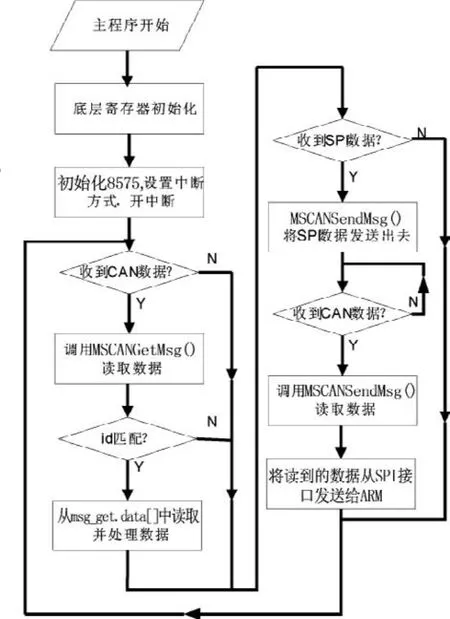
图10 主任务流程图
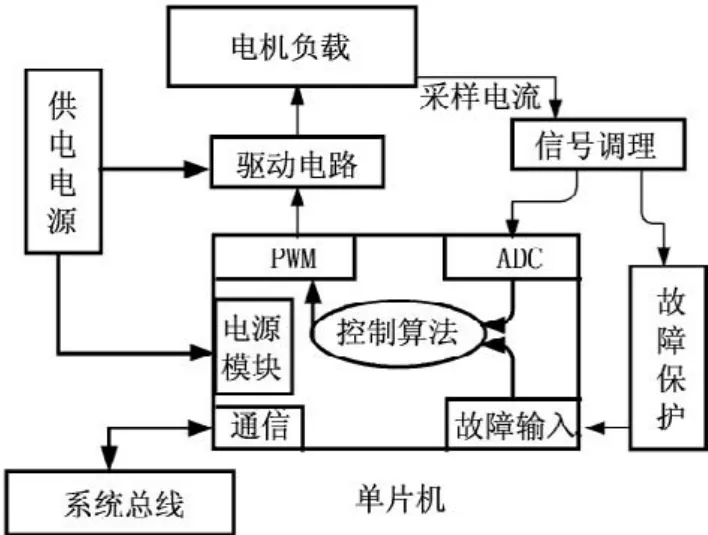
图11 实验样板结构框图
医用气动管道物流传输系统有效地提高了各种医用物品在医院内的传输效率,为医务人员创造出高效的工作环境,为患者营造出更便捷的就医环境,必将成为现代化医院的发展趋势,因此,加快其国产化具有重大意义。
[1]沈崇德.浅谈医院物流传输系统[J].医疗卫生装备,2009,30(6):29.
[2]杨巍.物流传输系统在医疗工作中的应用[J].医疗卫生装备,2006,27(12):52.
[3]林昌勤.气动管道物流传输系统在现代医院中的应用[J].医疗装备,2005,11.
[4]岳立桐.医院用气动管道物流传输系统设计[J].电气自动化,2009,31(3).
[5]SWISSLOG. Pneumatic Tube System Components Overview,Healthcare Solutions.
[6]华成英.模拟电子技术(第5版)[M].北京:高等教育出版社,2007.
[7]周顺荣.电机学[M].北京:科学出版社,2002.