基于Pro/ENGINEER的水轮机振动平台运动仿真方法
2010-09-15胡友明
黄 尧,胡友明
(华中科技大学 机械科学与工程学院,湖北 武汉 430071)
基于Pro/ENGINEER的水轮机振动平台运动仿真方法
黄 尧,胡友明*
(华中科技大学 机械科学与工程学院,湖北 武汉 430071)
介绍了采用Pro/EN GIN EER[1]进行振动平台运动仿真的基本方法[2-3],结合振动平台的设计与制造特点,阐述了基于机械(M echanism)模块实现振动平台工作过程中的关键技术,给出了具体的操作步骤,实现了振动平台的运动仿真,最后总结了该方法的优越性。
Pro/EN GIN EER;运动仿真;振动;设计
水轮机模拟振动平台是进行实物仿真(Hardware-in-the-loop Simulation)的关键设备[4,5],在水轮机的仿真过程中起着极为重要的作用。仿真振动平台可以模拟水轮机在空间实际的运动情形,运动学和动力学特征,采集现场信号,从而可以对水轮机的性能进行反复测试,获得较为重要数据。振动平台性能的优劣直接关系到仿真和测试实验的可靠性和置信度,因此,振动平台运动仿真的研究对水轮机运行性能的分析具有重要的意义。
虚拟装配是根据产品设计的形状特征、精度特性,真实地模拟产品三维装配过程,并允许用户以交互方式控制产品的三维装配,再通过运动仿真模拟机器的运动过程,就可以在产品的开发设计阶段发现设计中存在的问题以及与用户要求的符合程度,进而进行方案修改。
在水轮机的开发过程中应用这种方法可以大大缩短产品的开发周期,减少样机实验次数,迅速地对市场做出反映,并降低产品的成本,提高企业的竞争力。本文在Pro/ENGINEER wildfire2.0 环境下针对某动态性能模拟测试系统的振动平台进行了三维造型设计[6,7],并完成了振动平台零部件的装配过程仿真,同时对振动平台的运动学进行了仿真研究。
1 基于Pro/ENGINEER的振动平台机构运动仿真基本方法
装配工艺在振动平台制造中起着重要的作用,可靠的装配过程可以对振动平台零部件的可装配性进行评价,同时是保证振动平台实现预定精度指标的关键环节[8]。而振动平台的运动学分析可以校验运动部件能否实现预定的运动,同时为实现振动平台的可靠性控制奠定基础。振动平台的装配过程仿真和运动学仿真能够以低成本方式准确地检验设计方案,指导设计过程,降低设计风险,从而达到缩短周期和节约成本目的。仿真过程的动画将输出为视频文件,可以用作设计方案展示、产品推介、装配及维护人员的培训等,成为设计环节与产品研制下游环节的互动平台;同时,也有效地避免了频繁启动物理实机,实现了技术演示的简单方便、低成本和高效率的特点。
机构仿真技术是通过计算机技术来模拟真实机构的运动过程,同时借助系统建模技术和可视化技术来实现机构仿真。
Pro/ENGINEER是一套由设计至生产的机械自动化软件,是一个参数化、基于特征的实体造型系统并具有单一数据库功能。在Pro/ENGINEER中,运动仿真的结果不但可以以动画片的形式表现出来,还可以以参数的形式输出,从而能够获知零件之间是否干涉和干涉的范围有多大等,并根据仿真结果对所设计的零件进行修改,直到不产生干涉为止。在Pro/ENGINEER系统中,使振动平台组件实现运动仿真的方法有3种, 机械(Mechanism)模块实现,Animation功能实现, Pro/MECHANICA(简称Pro/M)模块的Motion部分实现PRO/MECHANICA中的MOTION 模块,是一个完整的三维实体静力学,运动学,动力学和逆动力学仿真与优化设计模块,是机构运动分析强有力的工具。在Pro/ENGINEER操作界面就可以使用集成的PRO/MECHANICA MOTION 中的函数。
机构运动仿真是在Pro/ ENGINEER wildfire2.0系统的装配模式中进行的,其Mechanism功能专门用来处理装配件的运动仿真[9,10]。本文基于机械(Mechanism)模块实现振动平台工作状态的运动仿真在装配(Assembly)模式中[11],Mechanism功能专门用来处理组件间的运动仿真。该模块与Pro/E完全集成,不需单独安装,操作简便易用,但分析功能不是很强。它可以使用户通过运动副/连接的设定,使振动平台组件按实际情况运动[12]。在Pro/ENGINEER的机械(Mechanism)模块中,可进行振动平台的机械运动仿真,并可将其结果输入到Pro/MECHANICA中,以便进一步进行力学分析,也可将机械模型带入到设计动画(Animation)中以创建一个动画序列[13]。总体方案设计主要是利用已知条件,以及希望达到的目的或机械应实现的功能,进行机械的全局设计,在头脑中构思形成比较完善的设计方案。
2 振动平台机构运动仿真设计
2.1 机构运动仿真的设计过程
机构运动仿真的设计过程如图1所示,主要可分为以下几个步骤:
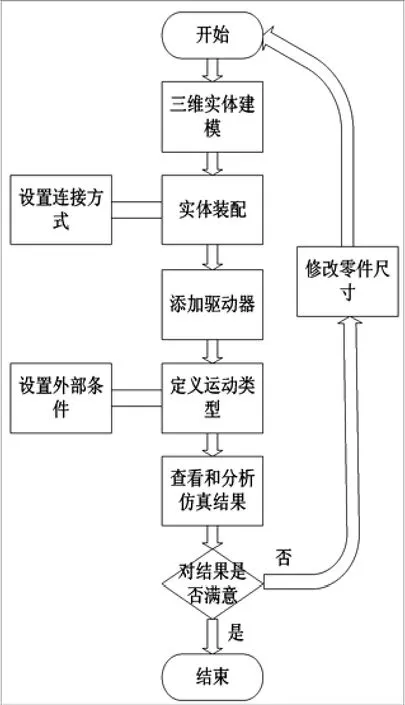
图1 机构运动仿真的设计流程图
(1)创建机构
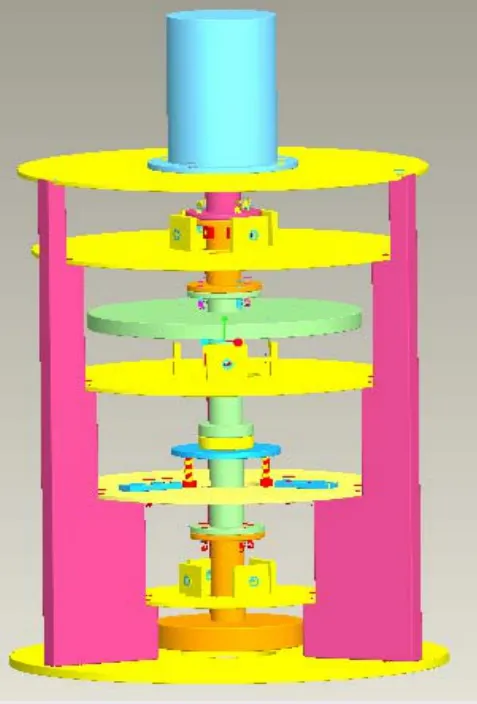
图2 水轮机模拟振动平台装配图
首先确定各零件的形状、结构、尺寸和公差等,并在计算机上进行三维实体造型,然后通过装配模块完成各零件的组装,形成整机装配是运动仿真的前提保障,装配关系的正确与否直接影响着运动仿真的结果,装配前首先要确定运动的各构件以及各构件之间的运动副。确定好各构件及各构件之间的运动副之后,即可通过选择构件和运动副组成机构,最后由各机构组成整机,并为仿真作准备。在运用Pro/ENGINEER wildfire2.0在进行机构设计和运动仿真的过程中,机构的创建是一个很重要的步骤,机构没有创建好,后续的运动方针和模型分析等工作都不能够进行[14]。水轮机模拟振动平台装配图如图2所示。
(2)使机构产生运动
在装配环境模式下,打开振动平台装配文件,选择菜单/应用程序Mechanism进入运动仿真环境。设置运动环境是定义机械系统运动所必需的各种条件,比如:运动的动力源,初始位置和状态等。在复杂的机械系统中,要定义多重的动力驱动,并要定义不同驱动之间的大小方向等的关系,还要约束机构的最大和最小运动极限,使系统能在合理的范围中运动。在已建立运动模型的基础上,此步骤将赋予模型运动的属性。系统将在此定义下完成要求的运动。Pro/E机构运动仿真的主要工作就是完成装配和定义连接,添加驱动器,运动仿真和结果回放。首先,将机构各元件使用三维实体建模模块创建后,存放在同一工作目录中。为了使机构模型能够运动起来,进入“Mechanism”模块向模型中添加驱动器。驱动就是机构的动力源,伺服电机能够为机构提供驱动。通过伺服电机可以实现旋转及平移运动,并能以函数的方式定义运动轮廓,可以使用参数进行控制。振动平台工作状态的运动仿真主要是振动平台大轴的转动,故在此对大轴设置伺服电机。
(3)进行机构运动仿真
分析运动机构是定义要分析的属性。在 PRO/M中包括装配分析,速度分析,静态分析,运动分析等多种分析类型[15]。通过对系统的各种动态分析,可迅速得到相关的信息,以此设计和完善构件。设定分析条件并运行完成对机构的连接和驱动的设置后,就可以为运动设置合适的条件及环境,随后进行机构的运动分析。
(4)查看和分析仿真结果,分析研究机构模型
对机构的分析运行完成后,就可以使用回放/测量等功能进一步了解运动过程。如单击/结果回放按钮,打开/回放对话框:选取/全局干涉,单击/播放按钮,即可观看振动平台工作状态的运动仿真结果.再如单击/运动包络按钮,打开/创建运动包络对话框:设置运动级别值,选取零件,既可预览包络模型,也可保存包络模型。通过“回放结果”来重新演示机构运动过程,检测干涉、定性分析从动运动特性,保存运动结果并创建MPEGJPEG文件等。在整个机构运动仿真的过程中,各步骤之间并非独立的,而是相互关联和影响的,通过分析仿真的结果,不断完善运动模型、变换运动的环境,才会使最终的设计结果趋向满意。
2.2 机构连接类型简介

2.3 机构运动仿真的优越性
通过机构仿真,可以在进行整体设计和零件设计后,对各种零件进行装配后模拟机构的运动,从而检查机构的运动是否达到设计的要求,可以检查机构运动中各种运动构件之间是否发生干涉。同时,可直接分析各运动副与构件在某一时刻的位置、运动量以及各运动副之间的相互运动关系及关键部件的受力情况[16]。从而可以将整机设计中可能存在的问题消除在萌芽状态,减少试制样机的费用,并大大缩短机械产品的开发周期。
2.4 几个需要注意的问题
(1)运动模型的质量属性包括密度,体积,重心和惯性矩对于不需要考虑/力的场合,例如纯粹的机械运动,可不设置质量属性。
(2)连接能限制主体的自由度,仅保留所需的自由度,以产生机构所需的运动类型,连接的建立需要配合/约束去限制主体的某些自由度,而常规的装配则限制了元件所有的自由度。在完成连接装配后,若要移动元组件,不能在/元件放置中直接移动,而应切换到机械(Mechanism)下,单击,可实现拖动。
(3)对运动组件的连接完成后,可以通过/连接轴设置功能对连接作参数设定,例如主体的相对位置/零位置/参照运动范围限制等。
2.6 仿真分析结果
根据前面的设计,我们进行了振动仿真,主要包括机构的基本运动仿真和不同工况下面的运动仿真,由于还没有和外部测试和控制系统连接,目前的所有仿真是内部自定义的,运动结果只能满足基本的需要,但是已经可以考到整体的三维运动仿真效果,只要和外部系统连接起来就可以实现整体的协同仿真效果,是后续要研究的重点。
3 结语
从以上实例可以看出,Pro/ENGINEER提供了完善的仿真功能,使得原来在二维图纸上难以表达和设计的运动变得直观和易于修改。使用三维实体建模模块创建模型后,既可模拟模型的运动过程,分析机构的运动轨迹、位移以及干涉等问题,还可以将仿真的结果输出,生成MPEG、JPEG等格式的文件,帮助用户更好的完成机构设计,并且能够大大简化机构的设计开发过程,缩短其开发周期,减少开发费用,同时提高了产品质量。Pro/ENGINEER运动分析模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。运动分析模块的分析结果可以修改零件的结构设计或者调整零件的材料。设计的更改可以直接反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可直接反映到装配主模型中,所以,在振动平台的产品开发中,应用Pro/ENGINEER运动分析模块除了可完成以上所述的仿真功能外,还有更多的功能有待发掘和利用。
[1] 詹友刚.ProPENGINEER2001教程[M].北京:清华大学出版社2003.
[2] 祝凌云,李斌.Pro/PENGINEER运动仿真和有限元分析[M].北京: 人民邮电出版社,2004.
[3] 黄圣杰,张益三,洪立群.ProPENGINEER2001高级开发实例[M].北京:电子工业出版社,2002.
[4] 方建军,刘仕良.机械动态仿真与工程分析工程应用[M]. 北京:化工工业出版社,2004.
[5] 刘长海. 舰载雷达天线转台系统的装配设计及运动仿真[J]. 电子机械工程,2002, 18(1): 17-21.
[6] 梅晓榕,陈明,张卯瑞. 三轴仿真转台的建模与仿真[J]. 系统仿真学报,2001, 13(3): 278-279.
[7] 赵志魁,王立琦,马川,等. 三轴运动仿真与虚拟现实系统[J]. 实用测试技术,1997(4).
[8] 王军辉. Pro/ENGINEER 下装配过程的仿真[J]. 兵工自动化,2002, 21(2): 43-44.
[9] 徐国斌. Pro/ENGINEER Wildfire 在企业中的实施与应用[M]. 北京:机械工业出版社,
[10] 周四新,和青芳. Pro/ENGINEER Wildfire 基础设计[M]. 北京:机械工业出版社,2003.
[11] 戴国洪,孙奎洲,张友良. 基于 Pro/E 的装配过程动态仿真与干涉检查[J]. 机床与液压,2003(6): 64-66.
[12] 谭雪松.Pro/E中文版机械设计实战训练[M].北京:人民邮电出版社,2004.
[13] 江宏.Pro/E结构分析与运动仿真[M]. 北京:中国铁道出版社, 2004.
[14] 黄锡恺,郑文伟. 机械原理[M]. 北京:高等教育出版社, 1994.
[15] 高秀华. 机械三维动态设计仿真技术[M]. 北京:化学工业出版社, 2003.
[16] 宋晓华,吴 志,周明安. 计算机仿真在机构动力学分析中的应用[J].轻工机械,2005, 23(2): 52-54.
Study on the Movement Simulation of Vibrating Platform of Water Turbine Using Pro/ENGINEER
HUANG Yao,HU You-ming
(School of Mechanical Science & Engineering, Huazhong University of Science & Technology, Wuhan Hubei 430074, China)
The basic method of simulation of vibrating platform movement using Pro/ENGINEER was introduced in the paper. According to analyzing the design and manufacturing characteristics of vibrating platform, the key technologies of vibrating platform basing on mechanism module were expatiated, and the detailed operation steps were carried out to performed movement simulation of vibrating platform. Finally the superiority of the method was concluded
Pro/ENGINEER; movement simulation; vibration; design
TH139
A
1009-5160(2010)03-0041-04
*通讯作者:胡友明(1965-)男,教授,博士生导师,研究方向:数控装备,智能制造与控制等.
国家自然科学基金(505750087).
