堆垛机模糊反馈校正控制系统的设计
2010-08-24张祖鹰
张祖鹰
ZHANG Zu-ying
(南京化工职业技术学院,南京 210048)
0 引言
堆垛机调速的要求很高,它是不停运动的,它的运行速度是准确定位、运行过程平稳的关键。本文根据堆垛机运行工况,在位置速度控制上,采用了反馈校正模糊控制算法,综合利用模糊控制的快速性、鲁棒性好的优点和反馈校正控制的稳态性好的优点,设计反馈校正模糊控制器,使堆垛机能够在负载变化时,将稳定运行速度保持在一定的范围内,同时解决了由于速度扰动的影响而产生的堆垛机的蠕动、抖动和定位错误等问题,也避免了因严重的积分饱和现象而造成的很大的超调和长时间的振荡现象,从而提高堆垛机的定位精度和系统运行的稳定性、可靠性,具有很高的实用价值。
1 模糊反馈校正控制系统
控制系统需要数学模型,很多时候被控对象精确的数学模型很难建立,也就难于用自动控制技术进行满意的控制,这时,如果用手动控制方式来操作,人的手动控制决策可以用语言加以描述,总结成一系列条件语句,即控制规则,让微机模拟人的思维模式,运用程序来实现这些控制规则,这样就可以利用微机取代人进行对被控对象的自动控制,这是模糊控制的基本思想。
模糊控制系统一般由四个部分组成:模糊控制器、输入/输入接口装置、被控对象执行机构、传感器。其基本原理如图1所示。
2 模糊控制器的设计
模糊控制器是模糊控制系统中的关键一环,它的设计包括以下几项内容:
2.1 确定模糊控制器的输入变量与输出变量
模糊控制器的输入变量可以有三个:即误差、误差的变化、及误差变化的变化,输出变量一般选择控制量的变化。通常将模糊控制器的输入变量的个数称为模糊控制器的维数,目前广泛被采用的均为二维模糊控制器,如图2所示。
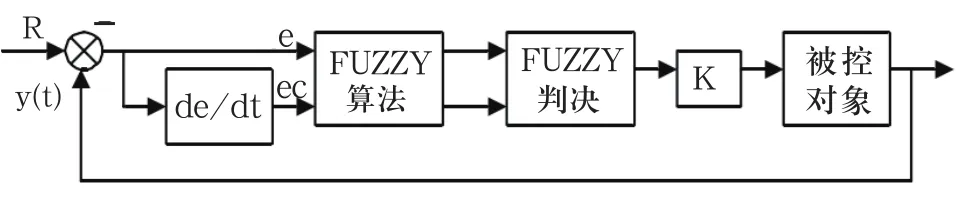
图2 常规二维模糊控制器
2.2 隶属度函数的确定
隶属度函数是模糊数学最基本和最重要的概念。在模糊理论中,对模糊性的描述就是通过隶属函数才能进行。
2.3 模糊控制规则的设计
控制规则的设计是模糊控制器的关键,一般包括三部分内容:
1)选择描述输入和输出变量的词集
一般为七个词汇,即:{负大,负中,负小,零,正小,正,中,正大}。
2)定义模糊变量的模糊子集
定义一个模糊子集,实际上就是要确定模糊子集隶属函数曲线的形状。将确定的隶属函数曲线离散化,就得到了有限个点上的隶属度,便构成了相应的模糊变量的模糊子集。
3)建立模糊控制器的控制规则
模糊控制规则是对系统控制经验的总结,这些经验用模糊条件语句来表示。模糊控制规则的生成有四种方法:
(1)根据专家经验或过程控制知识生成控制规则。
(2)根据过程的模糊模型生成控制规则。
(3)令根据对手动控制操作的系统观察和测量生成控制规则。
(4)根据学习算法生成控制规则。
2.4 确立模糊化(量化因子)。
如果精确量x的实际变化范围为[a,b],将[a,b]区间的精度变量转化为[-n,n]区间的离散量。
2.5 模糊推理及其模糊量的非模糊化方法
把模糊量转换为精确量的过程称为清晰化,又称反模糊化的模糊判决。
2.6 论域、量化因子、比例因子的选择
量化因子大小对控制系统的动态性能影响很大。选的较大时,系统的超调也较大,过渡过程较长;反之,超调量减少,但系统的响应速度变慢。
3 堆垛机控制系统的模糊预测控制模型
堆垛机定位精度与机构执行速度(即效率)是一对矛盾体。如果为了提高堆垛机的快速性而增加各段速度或者将减速点后移,必然会增加定位的超调量,降低定位精度;反之,如果为了满足定位精度而降低速度或将减速点前移,则必然会影响定位的快速行,增加作业时间,堆垛机的效率将降低。要解决以上的问题,经典的控制理论已经显得无能为力,所以要选择先进的控制策略和新的控制算法来控制堆垛机的调速与定位。
结合模糊控制与反馈校正的预测控制可以建立堆垛机控制系统的模糊预测控制模型。如图3所示,预测控制原理框图。
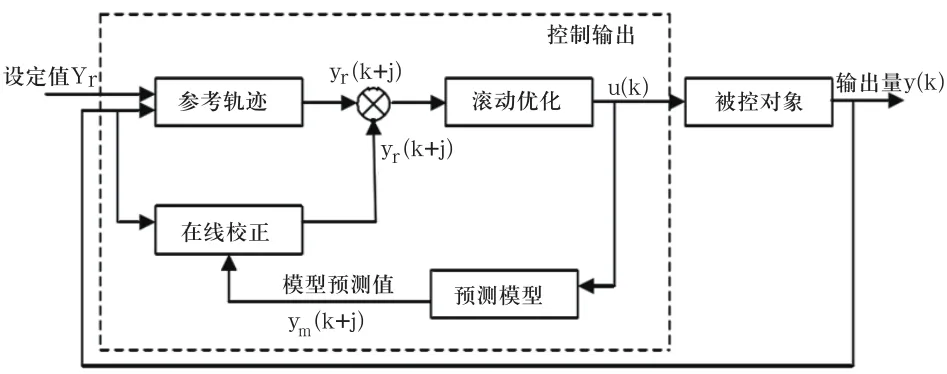
图3 预测控制原理框图
滚动优化:模型预测控制是一种优化算法,它是通过某一性能指标的最优来确定未来的控制作用的。
预测控制:是一种闭环校正控制算法。由于实际系统存在非线性、时变性等因素的影响,在预测控制算法中的预测模型存在失配问题,从而会引起预测模型的预测输出与对象实际输出之间存在着一定的偏差,称之为预测误差,为克服这个误差一般用反馈校正方法。
预测模糊控制是在预测控制和模糊控制的基础上,加上通过对被控对象动态特性的模拟而建立的系统模型,系统通过对输入状态值和模糊控制规则的一系列设定的候补值进行功能模拟,再用其结果来预测控制性能,最后根据多项性能指标的预测结果进行模糊推理决策以得到最适当的控制指令。其控制过程可用图4来表示:
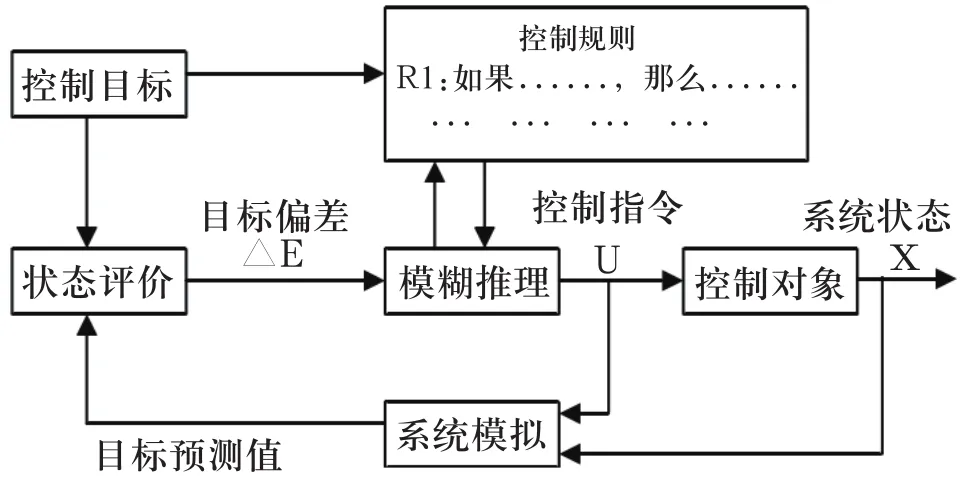
图4 预测模糊控制方式
堆垛机的运行特性受载荷、行走距离、安全性要求等多种因素影响的,模糊控制器不断地根据控制规则推出有可能执行的控制指令,通过对这些控制指令所引起的性能指标变化进行预测,选择出相对最好的控制指令进行控制。
4 预测模糊控制器的设计
熟练操作工经验的描述和获取熟练操作工在对系统的操作中,要不断根据目标和系统的状态变化情况决策,以选择出认为合适的相对最好的控制指令;同时还要有如果遇到突发事件如何进行处理的思想准备。这就需要对可能实现的控制指令及其控制结果进行语言描述,并作为定性的经验法则记录下来。
1)对经验法则中描述程度的词进行模糊定量,用语言描述的经验法则中,控制目标和系统状态需要一些模糊用语来描述,并把它们用模糊集合进行模糊化处理。
2)建立被控对象的部分模型
选择有代表性的可能实现的控制指令,根据被控系统的特性行为预测系统性能指标的变化,据此建立系统的部分模型,这种模型可以是数学模型,也可以是定性的模糊模型。
3)把经验法则转化为模糊控制规则
把用一般语言描述的经验法则规格化,设法将它们写为所采用的计算机语言能表达的符号化的模糊控制规则。
4)对模糊控制规则和状态的调整
根据系统的实际情况,经过实验或调试,对原有模糊控制规则以及分档的模糊状态(即模糊集合的隶属函数)进行修改、调整和补充。
5 堆垛机位置预测模糊控制仿真
堆垛机位置预测模糊控制仿真运行,是使用MATLAB仿真软件对预测模糊控制系统进行仿真研究。以MATLAB为基础开发的实用工具箱极大的丰富了MATLAB的内容。这里主要应用SIMULINK工具箱、FUZZY工具箱。SIMULINK是基于模型化图形组态的控制系统仿真软件,它具有SIMU(仿真)与LINK(连接)两大功能,它使一个复杂的控制系统的建模与数字仿真变得十分直观和相当容易。它可以使系统仿真人员不必详细了解相应算法的一些具体内容,使得原本复杂艰巨的二次模型化任务变得容易了,从而提高了工作效率,保证了仿真结果的正确性。并与Z—N整定法PID控制的数字仿真结果进行对比,验证分析的结果。
位置控制系统为二阶惯性,其传递函数为:
设被控过程模型参数为:K=0.33,τ=0.8,T=0.33。无过程参数时变时,仿真时间30秒,仿真步长t =0.05
从图5和图6中可以看出:PID控制有几次超调,随着输入频率的增大,超调量也增大,且过渡时间较长,导致指令在稍有变化后,响应不能及时跟踪指令的变化,控制精度低。模糊控制响应快,但稳态精度低。只有预测模糊控制既超调很小,又达到很高的稳态精度,控制效果好。从仿真结果可以看出,本文所提的预测模糊控制方法较其它常规控制方法,如:PID控制、Fuzzy控制具有更好的动态响应特性和鲁棒性。

图5 传统PID控制的系统响应曲线图

图6 预测模糊控制的系统响应曲线
6 结论
利用模糊预测控制的基本算法,包括模糊控制和预测控制的基本理论,结合模糊控制与反馈校正的预测控制建立的堆垛机控制系统的模糊预测控制模型,使用MATLAB仿真软件对该预测模糊控制系统进行仿真研究,获得了优良的控制效果。
[1] 吉国宏M,自动化仓库堆垛机设计[M].北京:人民铁道出版社,1997.
[2] 熊肖磊,赵炯,周奇才.自动化立体仓库管理与控制系统的实现[J],制造业自动化,2002,24(4).
[3] 张欣,堆垛机智能控制系统的研究[D]北京机械工业自动化研究所,2005.
[4] D.R.伍德利,物料搬运[M].机械工业出版社,1975.
[5] 刘昌棋.物流配送中心设计[M].北京:机械工业出版社,2001.
[6] 李少远,李柠,复杂系统的模糊预测控制及其应用[M].科学出版社,2003.
[7] 李士勇,模糊控制神经控制和智能控制论(第一版)[M].哈尔滨:哈尔滨工业出版社,1996.
[8] Teresko,John.Automating the Warehouse.Industry Week/I W,2006,Issue 10:23-23.
[9] 韦巍编,智能控制技术[M].机械工业出版社,2003.
[10] 尹国民,自动化立体仓库实验台堆垛机结构及控制系统设计研究[D],山东大学,2006.
