一种机载预警雷达改进JDL-STAP算法
2010-08-21汪学刚
周 云 汪学刚 段 锐
(电子科技大学电子工程学院,四川成都610054)
1.引 言
空时自适应处理(STAP)技术能够从空间和时间二维同时区分目标和杂波,因而在机载预警雷达杂波抑制上具有明显的性能优势,受到了广泛关注[1-5]。但是,受自适应处理的空、时奈奎斯特采样率的限制及复杂的机载雷达杂波环境[6]的影响,实现理想最优STAP必须解决两个难题:高运算量和大规模训练样本集支持的问题。因此,采用各种降维或子空间处理技术是当前STAP技术的研究热点。
其中,局域联合(Joint-Domain Localized,JDL)处理算法是WANG H和CAI L提出的一种在波束域和多普勒域联合处理的空时自适应处理(STAP)技术[7]。JDL算法先对空时回波数据进行二维离散傅立叶变换(2-DFT),然后在频域实现对杂波和干扰的相干积累,使杂波和干扰能量集中在低维子空间内,最后在这个低维空间内进行自适应处理。这种处理方式,减少了在空-时域内进行STAP处理要求的系统自由度(Degree of Freedom,DoF),从而降低了系统对训练样本支持和运算速度的要求。但是,DFT法必须基于接收天线阵是理想均匀线阵(ULA)且阵元为各向同性的点传感器的假设才能实现,使DFT-JDL算法在实际应用中受到很大的限制。
为克服经典JDL算法遇到的上述问题,利用基于过完备基(Overomplete Bases)的信号表示理论[8-9],提出一种改进的从空-时域到角度-多普勒域的数据映射方法,使变换结果不受点传感器天线阵列配置和空间观测方向影响,增强了JDL算法的稳健性。
2.理论分析
2.1 理论分析
考虑某ULA具有N个各向同性的点传感器,每个阵元在一个CPI内收到M个相干脉冲。因此,来自给定距离单元的空时样本数据快拍可表示为MN×1维的列矢量,接收到的数据中包含了杂波、热噪声和可能的目标信号,即

式中:c为杂波矢量;n为白噪声矢量;ξt为潜在目标的幅度,ξt=0表示无目标;v(φt,f t)为对应于可能目标方向φt和多普勒频率 ft的期望空时导向矢量。空时导向矢量可以由空域导向矢量v s(φt)和时域导向矢量v t(f t)共同表示为

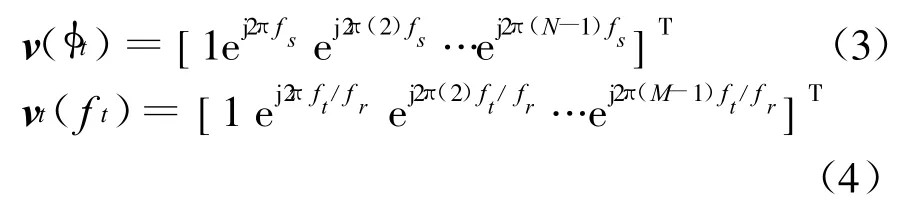
式中:⊗表示矢量的Kronecker积;f s为归一化空间频率(d/λ)sinφt(d是阵元间距,λ是雷达波长);fr是脉冲重复频率(PRF)。定义空域导向矢量vs(φ)为使波束指向偏离阵列法线方向φ的幅相加权系数。根据电磁互易原理,为使波束指向φ,天线阵元必须被与此导向矢量共轭的v*s(φ)所激励。因此,把空域数据变换到角度域的φ方向,可等效于用对应的空域导向矢量和共轭的激励导向矢量作内积。与此类似,把时域数据变换到多普勒域,等效于用对应的时域导向矢量与共轭的时域激励矢量v*t(f)作内积。空时样本数据矢量x在角度-多普勒域的响应为

式中:x(φ,f)为标量;符号“~”表示变换域。对选定的一组角度和多普勒频率值集合,利用式(5)可将空时数据矢量映射到对应的角度和多普勒单元。
在角度-多普勒域,由于雷达发射能量主要集中在观察方向,因此只有以φ为中心的相邻角度单元需要处理;而潜在目标的多普勒频移却是未知的,需要对所有多普勒频率单元都进行检测。因此,在观察方向上将角度-多普勒单元分成L组,每组称为一个局域处理区域(LPR),分别具有ηa个角度单元和ηd个多普勒单元,图 1示出了 ηa=ηd=3的LPR。JDL在每个LPR内进行自适应处理,并以LPR的中心角度-多普勒单元为检测单元。
对相邻距离单元空时数据样本进行角度-多普勒变换后,利用最大似然估计法,求出每个LPR区域的杂波样本协方差阵R。在角度-多普勒域内,空时自适应处理器表示为
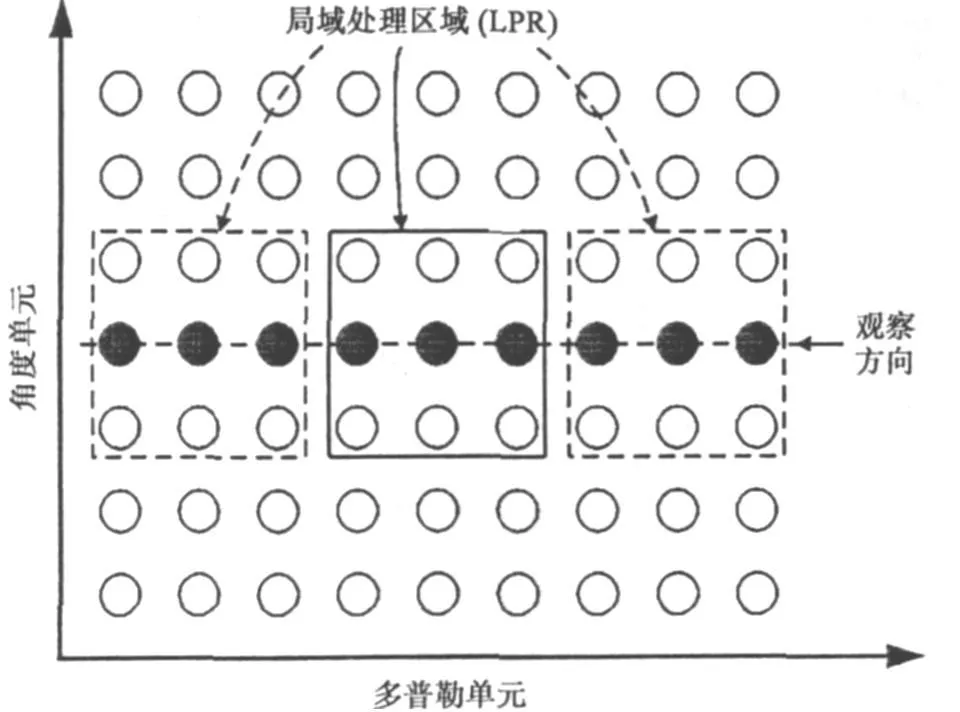
图1 联合局域化处理的局域处理区域:ηa=ηd=3

式中,v是式(2)中空时导向矢量的角度-多普勒域变换,且是 ηaηd×1维矢量 。
2.2 DFT-JDL
由数字信号处理知识可知,有限长序列x[n]的DFT为

式中,WN表示正交序列集中的基exp(j2π/N)。
通常阵元间距为 d=λ/2;空域角频率 Ks=2πf s=2π(d/λ)sin(φ)∈(-π,π)。当 f s=1/N 时,式(3)的元素 WaN=exp(j2πfs)=exp(j2π/N)与DFT中正交序列集的基相同,即WaN=Wn,空域导向矢量vs(φ)为DFT变换系数阵{WnkN}|N-1k=0的某一列。根据式(7),若空域频率 ks的间隔也为1/N,则矢量和空域导向矢量x的内积可以看作是在角度单元φ上的DFT。同理,若时间频率kt的间隔为1/M,则矢量x和时域导向矢量v t(f)的内积可以看作是在多普勒单元 f上的DFT。
由上述分析可知,DFT-JDL算法必须满足如下两个条件:
1)选择使fs的间隔等于1/N的角度集合和使的间隔等于1/M的多普勒频率集合,则向角度-多普勒域的变换可等效为进行DFT变换;
2)观察方向φt必须为1)所选择的角度集合中的元素,观察多普勒频率的归一化 f t/f r是1)所选择的多普勒频率集合中的一个元素,则目标导向矢量是DFT变换系数阵中的一列。
上述两个条件在天线阵为理想ULA且阵元为各向同性的点传感器的情况下才能满足。并且在无零填充的情况下,DFT只能形成 N个正交的角度波束和M个正交的多普勒波束,当目标的角度、多普勒频率发生扩展或偏离了观察网格时,DFT-JDL算法性能下降。根据DFT的正交性,角度-多普勒域内的空时导向矢量为v为

式中,1对应检测角度-多普勒单元,其余单元为0。
2.3 信号表示的过完备理论
信号的过完备表示理论(Overcomplete Representation Theorem)已经广泛用于信号处理领域,如医疗诊断、图像压缩和源定位等,其基本原理可以参见MALLAT S,DONOHO D L和RAO B D[8-11]等人的著作,以及关于函数逼近和最优基选择等理论的相关内容。
假设 n维线性空间 Vn,它由线性独立基底{φi(t),i=1,2,…,n}张成 ,则对任意 x∈Vn,都可以用下列线性组合表示

式中:α=(α1,α2,...,αn)T称为信号x 相对于基底{φi(t)}的矢量表示。若{φi(t)}在区间(t1,t2)上满足

则称此函数集为标准正交函数集,相应地,称式(9)为正交分解[12]。若在正交函数集{φi(t),i=1,2,...,n}之外,不存在函数ψ(t)满足下式

则称此函数集为完备正交函数集。
N点DFT的复指数集{WnkN}|N-1k=0即为完备的正交函数集。但是,在有限维空间内,可表示的信号数量与完备集内的基数量相关,故DFT只能给出频谱在 N个离散点{2πk/N, 0≤k≤N-1}上的值,而无法反映这些点之间的频谱内容。这就从本质上决定了DFT-JDL算法需要满足2.2节中的两个条件才能成立。因此,为提高可表示信号的数量,必须增加完备集内的基数量。基于过完备基的信号表示理论提出改进的JDL算法,先利用包含所有感兴趣观测角度的过完备基集合构造从空-时域到角度-多普勒域的变换矩阵,然后通过变换矩阵将空时数据精确映射对应的角度-多普勒单元,最后再在LPR内进行联合域自适应处理。
2.4 改进JDL算法
假设实际观察方向的角度集合为{φ1,φ2,...,φL},φL的位置与间隔不受前面两个条件的限制,只与实际的天线波束指向相关。因此,可形成的波束数量L也远远大于DFT变换后的波束数量N。从信号表示理论看,相当于用一个过完备的基集合去表示信号,从而获得对信号更加精确的描述。
根据式(5),从空-时数据域到角度—多普勒域的变换实质上就是空时导向矢量与对应投影角度-多普勒单元的导向矢量的内积,其中DFT法只是这个变换过程中的一种特殊情况。在数学上,将空时数据样本映射到LPR内就是乘以一个 MN×ηaηd维的角度-多普勒频率变换矩阵,即

若令 LPR 内有 3 个角度单元(φ-1,φ0,φ1;ηa=3)和3个多普勒单元(f-1,f0,f1;ηd=3),则映射到指定LPR的变换阵T AD为
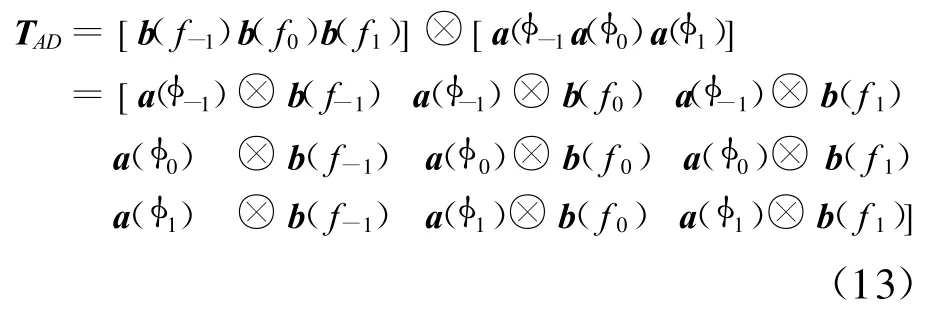
空时导向矢量在角度-多普勒域映射为

变换阵T AD中角度单元和频率单元的选择不需要任何限制条件。若角度和多普勒频率值满足2.2节中给出的两个条件时,DFT法等效于选择一个角度间隔为(d/λ)sin(Δφ)=1/N,多普勒频率间隔为 Δf=1/M的变换矩阵。
3.实验结果分析
考虑某机载雷达场景,比较DFT-JDL和改进JDL算法的性能。雷达工作波长为3 mm,天线阵为有8个接收通道的侧视均匀线阵,阵元间隔为1.5 mm,相干处理脉冲数为16,脉冲重复频率为4 k Hz,发射波束使用30 dB泰勒加权,脉压后的脉冲宽度为0.33μs,发射峰值功率为10 kW。杂波仿真使用KLEMM R的机载雷达空时二维杂波模型[4],设雷达波束与地面的夹角为27°。
先考察DFT法和变换阵法对不同指向天线波束的映射效果,如图2所示。图2(a)和图2(b)使用了不同的横坐标,这是由于DFT是在空间频率域实现的,而变换阵法基于角度的变换方法。受到频率分辨率和接收通道数的限制,DFT法只能分辨出频率间隔为1/N的N个频率点上的信号,当只有8个接收通道时,其空间频率分辨率仅为π/4,对应到角度域的分辨率约为10°,因此来自35°和40°,50°和55°的信号混叠在一起,并且由于45°的信号位于两个单元中间,对其分辨能力最差。变换阵法可以采用测量或电磁计算方式得到精确的空间导向矢量,再把空时数据准确映射到角度-多普勒域内,因此不受接收通道数、信号方向的限制,变换结果更加准确。
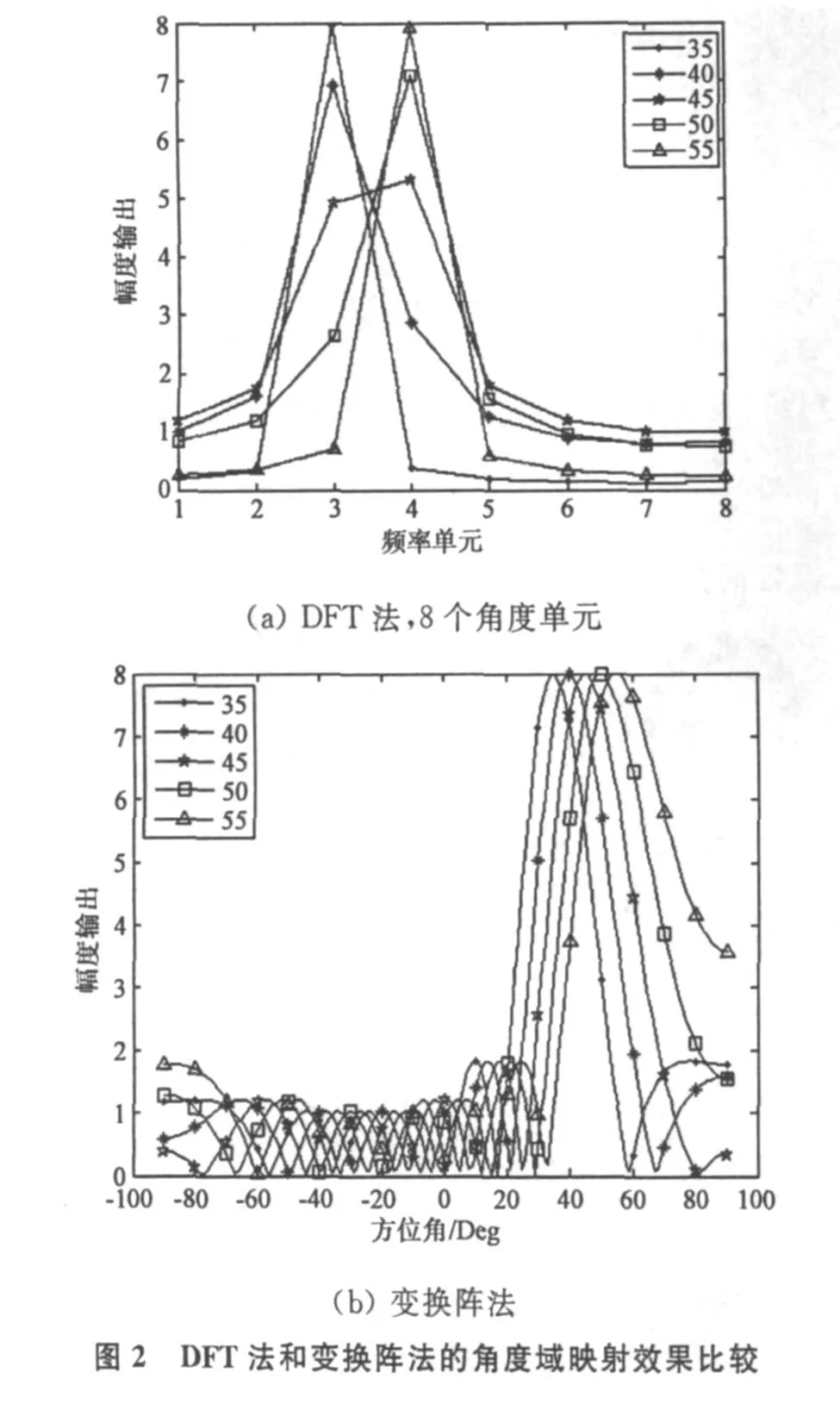
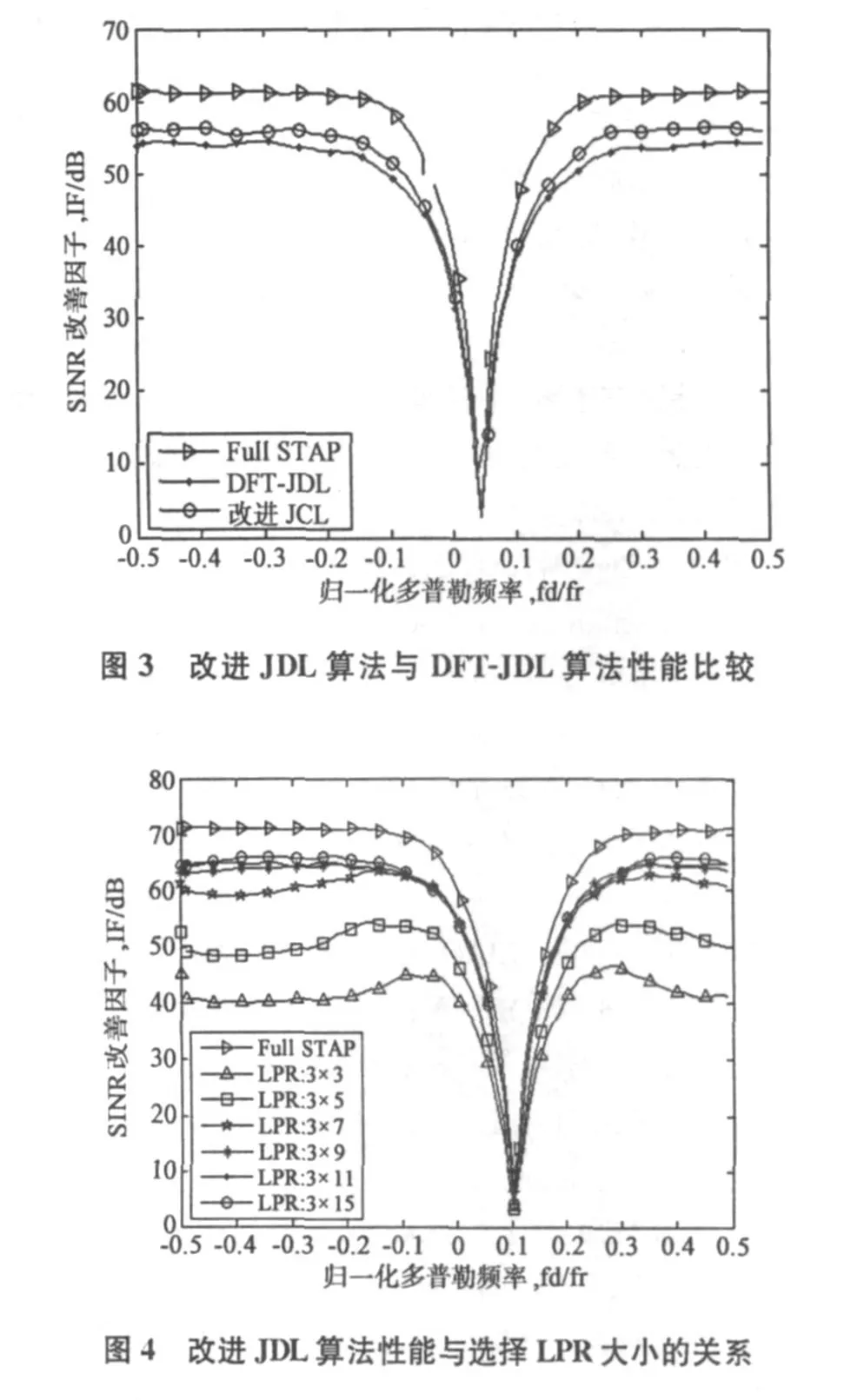
图3给出了分别采用改进JDL和DFT-JDL算法抑制杂波后的SINR改善因子图。仿真场景的杂噪比为50 d B,主波束的指向为偏离阵列法线方向5°,LPR选择3×7的处理区域。为准确估计出杂波的样本协方差阵,全部处理方法所用到的训练样本数都满足RMB准则[3](即独立同分布的训练样本数要大于两倍自适应处理的自由度)。对8点DFT来说,角度域的分辨率接近10度左右,因此DFT-JDL同改进JDL算法相比,平均SINR改善因子下降了2 d B。
图4给出取不同大小 LPR时,改进JDL算法的性能。仿真杂噪比为65 d B,主波束的指向为偏离阵列法线方向12°。杂波样本协方差阵估计的训练样本数都满足RMB准则。从图中可见,同全自适应情况相比,最好的JDL算法的平均SINR改善因子下降了5 d B左右,但是考虑到全自适应处理所需要的运算量和样本支持的代价,这种损失是可以接收的。受LPR内杂波自由度的影响,当LPR大小远远小于其杂波自由度时,增大LPR,JDL算法的性能会得到明显的提升;而当LPR的大小接近或大于杂波自由度时,JDL性能不会有太大变化。由于增大LPR会带来运算复杂度和训练样本数的增加,因此在实际处理时应该选择合适的LPR。
4.结 论
基于信号表示的过完备理论,提出了一种改进的JDL算法。该算法同经典的DFT-JDL算法相比避免了天线阵必须为ULA和全向点传感器阵元的要求,且观察角度不受DFT采样间隔的限制。仿真结果表明,同DFT-JDL算法相比,改进JDL算法的稳健性更好,可以用于天线阵列存在通道误差、互耦以一致性较差的实际工作环境中。改进JDL算法的性能与LPR区域内的杂波自由度相关,通过增大LPR区域提高处理增益,但是也增加了运算量和训练样本的数量。因此,杂波自由度与JDL算法局域处理区域的选择有密切关系,这是后继工作研究的重点。
[1] BRENNAN L E,REED I S.Theory of adaptive radar[J].IEEE Trans.AES,1973,9(2):237-252.
[2] REED I S,M ALLETT J D,BRENNAN L E.Rapid convergence rate in adaptive arrays[J].IEEE Trans.AES,1974,10(6):853-863.
[3] 王永良,彭应宁.空时自适应信号处理[M].北京:清华大学出版社,2000.
[4] KLEMM R.Space-Time adaptive Processing:Principles and Applications[M].London:IEE Press,1998.
[5] 段 锐,汪学刚,陈祝明,等.机载双基STAP非线性时变加权技术的研究[J].电波科学学报,2009,24(1):157-162.
DUAN Rui,WANG Xuegang,CHEN Zhuming,et al.The study on bistatic STAP nonlinearly time-varying weighting techniques[J].Chinese Journal of Radio Science,2009,24(1):157-162.(in Chinese)
[6] 王万林,廖桂生,张光斌,等.相控阵AEW雷达杂波抑制的非均匀处理方法研究[J].电波科学学报,2004,19(3):348-353.
WANG Wanlin,LIAO Guisheng,ZHANG Guangbin,et al.Study on STAP in non-homogeneous environment for phased array airborne early warning radar[J].Chinese Journal of Radio Science.2004,19(3):348-353.(in Chinese)
[7] WANG H,CAI L.On adaptive spatial-temporal processing for airborne surveillance radar systems[J].IEEE Trans.AES,1994,30(3):660-670.
[8] MA LLAT S.A wavelet tour of signal processing[M].San Diego:Academic Press,1998.
[9] DONOHO D L,JOHNSTONE I M,et al.Maximum entropy and thenearly black object[J].J.R.Statist.Soc.B,1992,54(1):41-81.
[10] RAO B D.Sparse signal reconstruction from limited data using focuss:a re-weighted minimum norm algorithm[J].IEEE Trans.SP,1997,45(3):600-616.
[11] 张 云,姜义成,李宏博.一种改善SAR对舰船目标成像质量的新方法研究[J].电波科学学报,2009,24(4):588-592.
ZHANG Yun,JIANG Yicheng,LI Hongbo.Improving synthetic aperture radar imaging of ship targets[J].Chinese Journal of Radio Science,2009,24(4):588-592.(in Chinese)
[12] 张明友,吕幼新,等.信号与系统分析[M].成都:电子科技大学出版社,1999.
