一种气动式深度模拟器设计
2010-08-10闫晓伟
闫晓伟
(92060部队,辽宁大连 116041)
1 引言
气动技术采用压缩空气作为工作介质,具有介质提取处理方便、工作环境适应性好、空气流动阻力小、维护简单、使用安全和成本低廉等优点,被越来越广泛应用于生产过程和自动控制的各个领域。可是由于空气可压缩性大,动作速度易受负载变化而变化,人们对气动位置和速度反馈难以精确控制。随着高性能的气动元件的出现,气动技术正在向机电一体化、集成化、智能化、小型化、轻量化、高精度和高速度方向发展。
本文提出一种气动式深度模拟器,它采用气动比例方向控制阀作为执行机构,利用自动控制技术调节进入和排出密闭容器中的气体,产生所需要的压力信号,在实验室条件下模拟产生不同水深的水压物理信号,作为信号源,可用于水下航行器和水中兵器的仿真实验。
2 系统组成及工作原理
深度模拟器由压力产生单元、压力控制单元和压力输出单元三部分组成。压力产生单元包括空压机、高压气瓶、过滤减压阀、进气/排气比例阀和密闭容器;压力控制单元包括压力变送器、控制器和计算机及相关控制软件和数学模型,是模拟器的核心;压力输出单元包括小深度输出接口和大深度输出接口,系统框图如图1所示。
该系统的工作原理是:空压机为系统提供持续的压力源,并将一部分气体储备在高压气瓶,系统由预定模型计算出需要模拟的压力变化曲线,由压力变送器实时检测密闭容器中的气体压力,作为反馈信号,输入控制器与模型参数进行比较,得到不同时刻的误差和误差变化率,采用模糊PID算法,计算得到输出电压信号,控制进/排气比例阀的开度,调节密闭容器中的气体压力,使其按预先设定的压力曲线变化,并满足设计的精度要求,达到模拟不同水深下压力信号的目的。
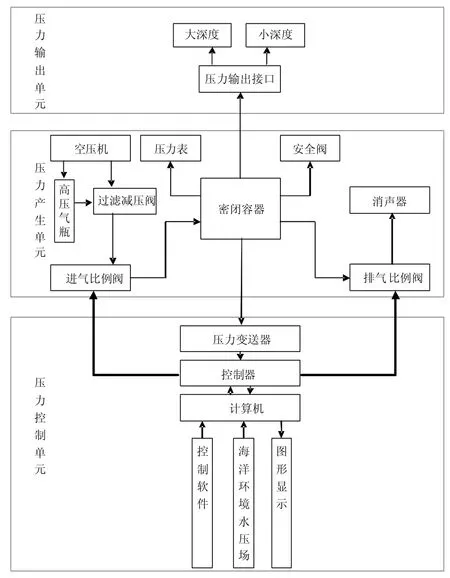
图1 深度模拟器原理框图
3 理论分析
3.1 密闭容器充放气过程的简化模型
本文研究的模拟器的压力是由密闭容器产生的,密闭容器内的压力变化就是模拟的压力变化,因此要根据气动理论分析影响密闭容器内气体压力变化的因素,建立密闭容器气体压力变化的数学模型,这是研究气动式深度模拟器的理论依据。
密闭容器的充放气过程是开口系统问题[1],容器内的空气与外部不仅有质量交换,还有能量交换。由于体积V不变,容器内空气的变化量仅限于压力P和温度T两个变量。空气的质量m尽管也变化,但不独立,它可以根据理想气体状态方程,由压力P和温度T算出来。

从压力微分方程、温度微分方程、连续性方程和伯努利方程入手[2],分析音速和亚音速流动时,气体流量公式及其影响因素。可以得到:容器内压力变化:式中,k为比热比;R为气体常数,空气为287 J/(kg·K);为进出容器的空气质量流量,kg/s;空气流入时qm为正,流出时qm为负;V’为容器的容积,m3;T2为容器内气体温度。
密闭容器的充放气过程简化为如图2所示:

图2 密闭容器充放气过程的结构简图

式中,ρ0为标准状态下空气的密度,ρ0=1.185 kg/m3。
充气时:

放气时:

式中,qv1和qv2为标准状态下充气和放气时的体积流量,m3/s;P1和T1为气源气体的压力和温度,单位分别为Pa和K;P2和T2为容器内气体的压力和温度,单位分别为Pa和K。
容器内气体压力随时间变化的数学模型为:

由于比例阀的临界频率是100 Hz,其动态特性较好,可将其动态响应视为一阶比例环节,阀的有效流通截面积Ax与控制电压U成线性关系:

式中,Kv为比例系数;ω为百分比,ω=0~1。
由上面的分析,可以得出:充/放气过程中密闭容器的气体体积流量qv与比例阀的有效流通截面积Ax、气源压力P1和温度T1、容器内压力P2和温度T2有关。当阀选定时,Kv即为常数,假设充/放气过程中气源压力P1保持恒定,忽略T1和T2的影响,则qv可看作是比例阀的有效流通截面积Ax和容器内压力P2的函数,即:

函数式(7)为非线性函数,当系统处于某稳定点(Ai, Pi)时,可以用线性化理论对其进行线性化,即可利用增量方程进行系统的动态特性分析。令

则:

对(9)按泰勒公式展开,忽略二阶以上无穷小项,得:

令,则(10)可写为:

对(1)、(6)和(11)式进行拉普拉斯变换,联立得方程组:
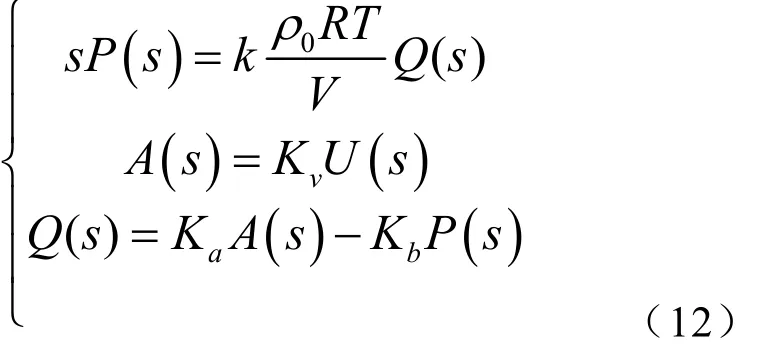
对方程组(12)求解,得控制电压U对密闭容器内气体压力P的传递函数,即:

式中,

密闭容器充放气过程简化模型为一阶惯性系统,K为传递系数,Tp为惯性时间常数。
3.2 模糊PID控制算法
由于气体压力控制系统本质上是非线性系统,很难建立精确的数学模型,系统的动态特性主要取决于控制算法和控制参数。传统的PID控制由于算法简单、参数调整方便并具有一定的精度,在过程控制中获得了广泛的应用,但由于PID的参数不易实时调节,很难适应参数实时变化的非线性系统。而模糊控制针对复杂的、具有不确定参数和难以建立精确数学模型的系统具有适应性强、鲁棒性好的优点,但对消除系统稳定误差的性能比较差,难以达到较高的控制精度。采用模糊PID算法既有适应性强、鲁棒性好的优点,又能消除稳定误差,可以实现对气体压力的精确控制。其原理如图3所示。
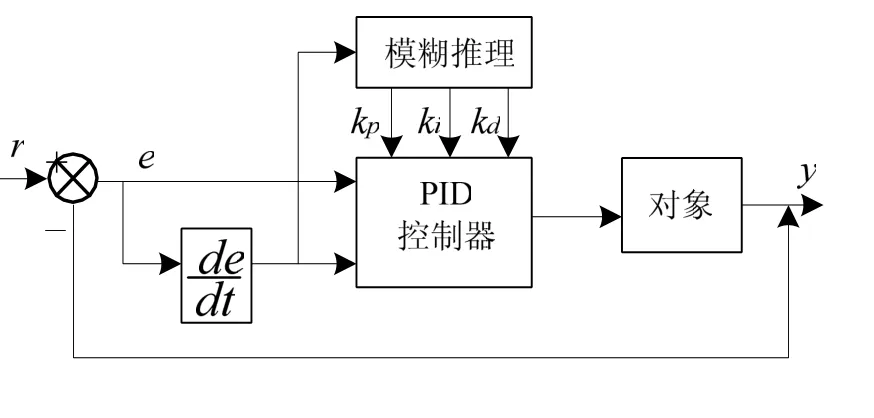
图3 模糊PID控制原理图
在本系统中,控制变量是密闭容腔内的气体压力,取压力的误差e(e=y-r)和误差变化率ec(ec=de/dt)作为模糊控制器的二维输入变量,输出电压信号uc作为模糊控制器的输出变量。
将e和ec的实际变化范围转换成模糊域上的集合,选用合适的隶属度函数,并对模糊集进行分档;采用Mamdani的max-min法[3]进行模糊推理,得出uc的隶属度函数。由数据和模糊语言控制规则,根据每一条推理规则,结合模糊判决,经过大量计算,构成模糊控制器查询表,利用模糊控制规则在线对PID参数进行修改。
4 关键技术及具体实施方案
模拟器分硬件部分和软件部分。硬件部分由空压机、高压气瓶、压力罐、过滤减压阀、进气/排气比例阀、安全阀、压力表、压力变送器、控制器和计算机组成。软件部分包括LabVIEW软件和MATLAB软件。利用MATLAB软件强大的计算功能,产生要仿真的数学模型,主要是建立不同深度和海况的水压场模型,通过LabVIEW中的“脚本节点”函数中的“MATLAB脚本”即可生成模型信号数据文件;LabVIEW主要用来设计系统的界面,实现人机交互,包括参数预置、数据文件导入和导出、图形显示及实验数据分析处理;其软件工作流程如图4所示。
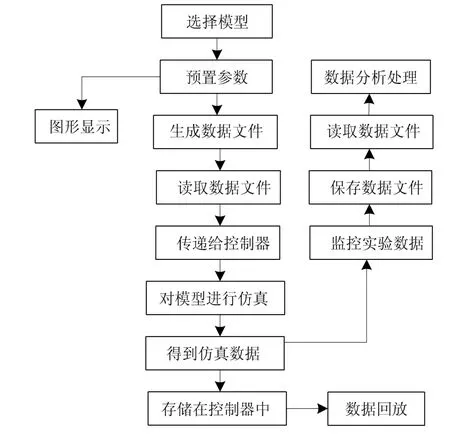
图4 模拟器的软件工作流程图
4.1 进/排气比例阀
比例阀的选型应遵循安全性、可靠性、适用性和经济性四项原则和六个方面的现场工况(管道参数、介质参数、压力参数、电源参数、动作方式、特殊要求),其中额定流量的选择是关键。密闭容器气体压力变化与进气/排气比例阀的开度有关,比例阀的开度是由控制电压或电流决定的。
采用直动式滑阀控制,单向流动,工作电压24 V,控制电压0-10 V,标准额定流量350 L/min,响应频率100 Hz。采用硬性密封方式,可任意位置安装,比例控制阀最大的特点就是可以根据控制电压或电流的大小来成比例地调节流量,理论上流量可以从0-100%,本文采用电压控制。
4.2 压力变送器
采用双量程设计,小量程0~5 bar,用于0~50 m水深;大量程0~35 bar,用于0~300 m水深;精确度0.05%,总误差0.25%,工作电压24 V。
4.3 控制器
包括两路模拟量输入和两路模拟量输出,接收压力变送器实时采集的压力罐中的压力信号,对模型进行分析计算,输出模拟控制信号,对进/排气比例阀的开度进行调节,使压力罐中的压力跟踪模型的压力变化曲线。
控制器是仿真系统压力控制单元的关键部分,主要有三个方面的作用:第一,采集压力变送器的检测值,与设定值比较,计算出偏差及偏差的变化率;第二,由控制算法计算出比例阀的控制电压,实时调节比例阀的开度;第三,与计算机进行通信,导入模型数据,导出实验数据。
4.4 计算机
计算机作为和控制器的通信平台,主要作用是:第一,产生要模拟的模型数据文件;第二,和控制器进行通信,完成模型数据及和实验数据的导出;第三,对实验数据进行后期处理。
5 结束语
本文提出的气动式深度模拟器的方案,具有深度范围大、动态响应好、精度高的特点,另外操作方便、不污染环境,但在空压机工作时有一定的噪音。针对气动技术的特点,可以得到:
(1)空压机输出的压力级不高(一般小于0.8 MPa),可以满足浅水(50 m)的气源要求;但大深度(>50 m)时,需加装高压气瓶,作为气源,同时压力容器和管路要满足耐压要求;
(2)对气动理论进行分析,特别是密闭容器充放气过程简化模型的建立,通过实时调节比例阀的开度来控制容器内的压力变化是可行的。另外采用双量程高精度压力变送器,使模拟器既有大的工作范围,同时在小深度时又具有高的精度;
(3)由于气体本身的可压缩性和控制器在PID调节时的滞后性,在模拟低频数据时具有很好的效果。
:
[1]蔡茂林. 现代气动技术理论与实践第二讲: 固定容腔的充放气[J]. 液压气动与密封,2007, (3): 43-47.
[2]徐炳辉. 气动手册[M]. 上海: 上海科学技术出版社,2005: 1-20.
[3]张化光, 孟祥萍. 智能控制基础理论及应用[M]. 北京: 机械工业出版社, 2005:1-8, 116-133.