无轴承开关磁阻电动机悬浮绕组功率变换器的分析与改进
2010-07-25邓智泉罗建震王晓琳
杨 钢 邓智泉 曹 鑫 罗建震 范 冬 王晓琳
(南京航空航天大学自动化学院航空电源航空科技重点实验室 南京 210016)
1 引言
无轴承开关磁阻电动机定子具有主绕组和悬浮绕组,可实现驱动和自悬浮功能于一体。其不仅具有开关磁阻电动机结构简单、工作可靠、控制灵活、容错能力强等优点,而且还兼有磁悬浮电动机无摩擦、无接触、无润滑等一系列优良特性。其应用于五自由度悬浮电动机时可省去一个径向磁悬浮轴承,因而体积和重量大为减小,轴向长度缩短,使临界转速提高,在高速大功率领域有广阔前景。此外其对转子径向位置进行主动控制,对改善因不对称磁拉力造成的振动和噪声问题提供了一种新的思路。由于以上诸多优点,使无轴承开关磁阻电动机在航空高速、超高速发动机领域有极大的应用潜力[1-12]。
无轴承开关磁阻电动机功率变换器控制绕组电流,对电动机旋转和悬浮性能有重要影响。本文以一台 12/8结构的无轴承开关磁阻电动机为研究对象,推导了悬浮力和转矩的小信号模型,分析了绕组电流纹波对悬浮力和转矩的影响。针对悬浮绕组三相半桥功率变换器的不足,提出将悬浮绕组变换器改进为三相四桥臂结构并且采用三态控制模式,然后分析了其各种工作模式和数学模型。最后通过对实验样机的调试,给出了实验结果,验证了理论分析的正确性。
2 数学模型
无轴承开关磁阻电动机是在普通开关磁阻电动机定子上叠加一套绕组,利用该绕组有目的地改变原电动机气隙磁场的分布,从而控制作用在转轴上的麦克斯韦磁力大小和方向实现转轴悬浮[4-9]。电动机定子的每个凸极上有两套绕组,一是主绕组Nm,由四个正对凸极上的主绕组串联而成;二是悬浮绕组,分为α方向悬浮绕组Ns1和β方向悬浮绕组Ns2,分别由各自方向两个正对凸极上的悬浮绕组串联而成。
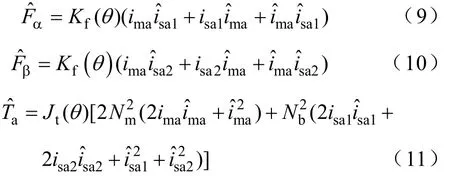
文献[5-8]推导了无轴承开关磁阻电动机的数学模型,文献[9]针对此模型的不足,提出了一种改进模型。其基本思路均为:首先得到气隙磁导,然后推导出用气隙磁导表示的绕组电感矩阵,再得出磁场储能的表达式,最后根据机电能量转换原理得出电动机的数学模型。根据文献[6-7],悬浮力和转矩(以A相绕组为例)可表示为
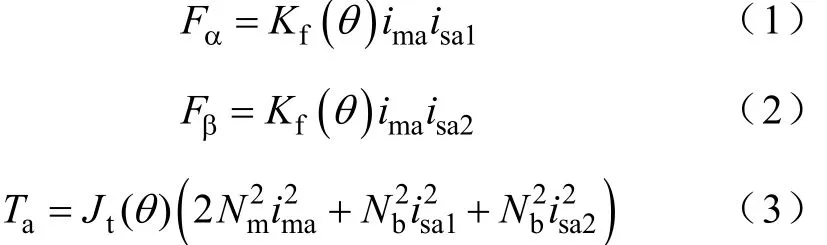
式中Fα,Fβ—— α和β方向悬浮力;
Ta——A相瞬时转矩;
ima,isa1,isa2——A相主绕组、悬浮绕组电流;
Nm,Nb——主绕组和悬浮绕组匝数;
Kf(θ),Jt(θ)——电动机参数和位置角的函数[6-7];
θ——转子位置角。
无轴承开关磁阻电动机中定义定转子齿轴线重合的位置为θ=0°的位置。
根据以上数学模型,确定无轴承开关磁阻电动机转矩和悬浮力的控制策略为:由位移反馈经 PID调节得到悬浮力;由转速反馈经PI调节得到转矩。根据所需悬浮力和转矩,在转矩脉动最小原则下确定开通角[9],求得主绕组电流,再由式(1)和式(2)求得悬浮绕组电流。然后通过相应的逆变器去控制绕组实际电流,进而控制所需悬浮力和转矩。根据文献[6-8]的分析,本文中主绕组电流采用方波电流控制,悬浮绕组电流按照上述控制策略由DSP控制器计算求得。由于实验样机为12/8结构,在尽量减少负转矩的前提下,最终选择单拍工作方式,每相导通15°的控制策略。图1为开通角θon为-7.5°时绕组电感电流示意图。
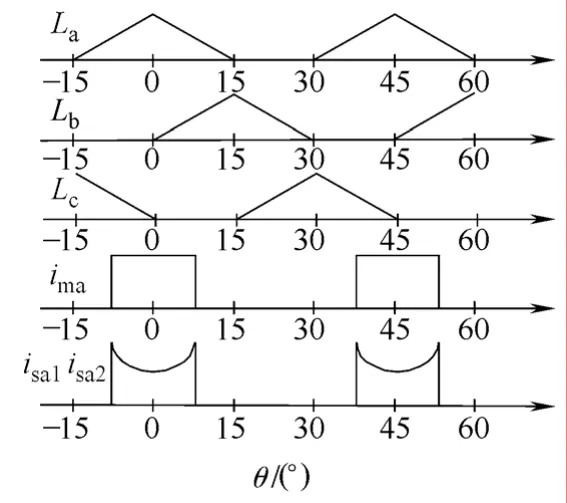
图1 绕组电感电流示意图Fig.1 Sketch map of windings inductance and current
3 悬浮绕组功率变换器
无轴承开关磁阻电动机功率变换器分为三部分:主绕组功率变换器和两套悬浮绕组(α 绕组和β绕组)功率变换器。两套悬浮绕组功率变换器结构和控制方式相同,控制信号均来自DSP控制器。根据电动机的数学模型和控制策略,主绕组和悬浮绕组功率变换器除满足一般功率变换器的设计原则之外,还要满足如下原则:主绕组功率变换器提供的电流大小可控,方向单向;悬浮绕组功率变换器提供的电流大小可控,方向可控。
3.1 三相半桥功率变换器
根据以上原则和文献[15]的分析,确定主绕组功率变换器采用控制最为简单的不对称半桥变换器,其工作模式和特点在多篇文献中已经论述过[11]。悬浮绕组功率变换器采用三相半桥式结构。由于电动机采用单相导通策略和三相半桥式变换器的拓扑结构,悬浮绕组功率变换器有两种工作模态,下面以α 悬浮绕组功率变换器A相为例进行说明。
(1)+1态。此时绕组端电压为母线电压的一半,绕组电流增加,电源向绕组提供能量。绕组通正向电流时闭合VT11,通反向电流时闭合VT12,如图2所示。电路方程为
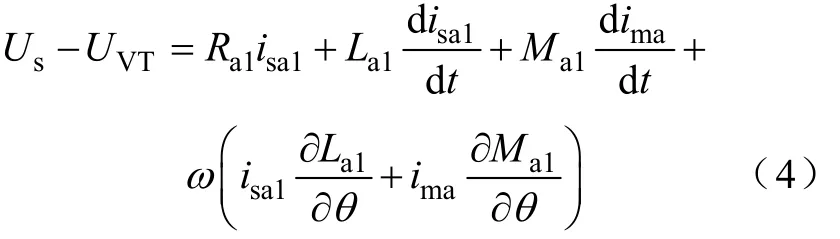
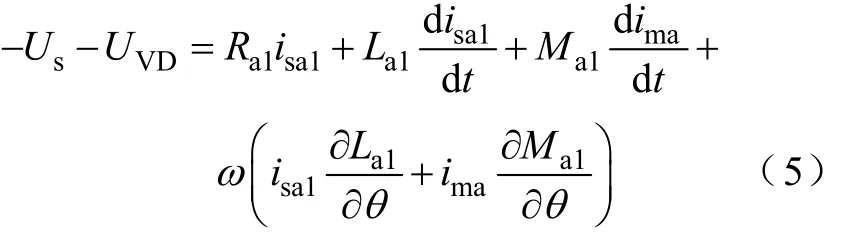
式中,Us为母线电压的 1/2;UVT为开关管压降;Ra1为A相α悬浮绕组电阻;La1为A相α悬浮绕组自感;Ma1为 A相主绕组和α悬浮绕组间的互感[5-9];ω为电动机转速。
图2 三相半桥功率变换器模态1Fig.2 Mode 1 of three-phase half bridge power converter
(2)-1态。此时绕组电压为负的母线电压一半,绕组电流减小,处于续流状态,向电容回馈能量。绕组为正向电流时,续流经VD12;反向电流时,续流经VD11,如图3所示。电路方程见式(5),UVD为续流二极管压降。
三相半桥式功率变换器所用开关器件最少,一般情况下均能正常工作,但其仍存在两个问题:中点电压漂移和电流纹波较大。
悬浮绕组功率变换器有两个分裂电容,其在工作过程中由于负载的不对称性,会带来中点电压漂移的问题。负载的不对称性是与转子所受外力有关,非人为控制。当系统要求各悬浮绕组一直保持固定方向的电流(如负向电流总是保持下管闭合)时,其总是由一个电容供给能量(Cs2),另外一个电容(Cs1)吸收回馈能量,会造成中点电压漂移较大,严重时使系统无法稳定工作。
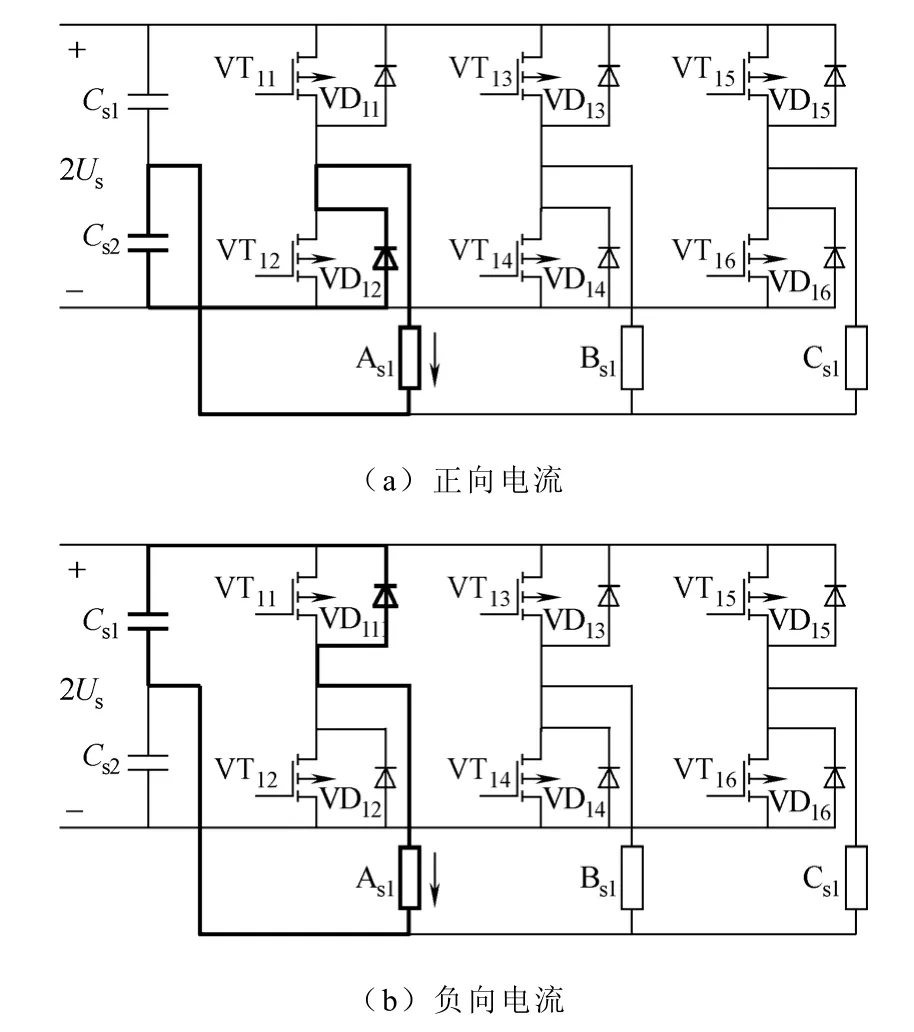
图3 三相半桥功率变换器模态2Fig.3 Mode 2 of three-phase half bridge power converter
此外三相半桥变换器只能采用两态控制方式,无法实现三态控制,绕组两端电压为母线电压一半,电流变化率大,在相同的开关频率下电流纹波较大。而电流纹波的大小会给系统带来一定的影响,一是电流的振荡会在电动机系统中带来额外的铁耗和铜耗,二是电流的振荡会引起悬浮力和转矩的振荡,继而会影响转子位移振荡,这需要通过转矩和悬浮力关于电流的小信号模型看出。
3.2 电动机转矩和悬浮力的小信号模型
从以上无轴承开关磁阻电动机的数学模型可以看出,悬浮力和转矩主要与电动机旋转位置角和绕组电流有关。电流的控制精度决定了转矩和悬浮力的控制精度,因此电流纹波的大小对悬浮力和转矩的控制精度有重要影响,所以有必要推导出电动机转矩和悬浮力关于电流信号的小信号模型。
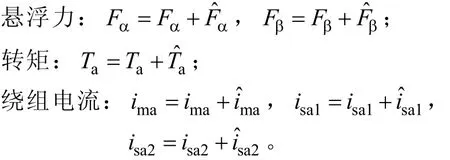
将以上各量代入式(1)~式(3)可得
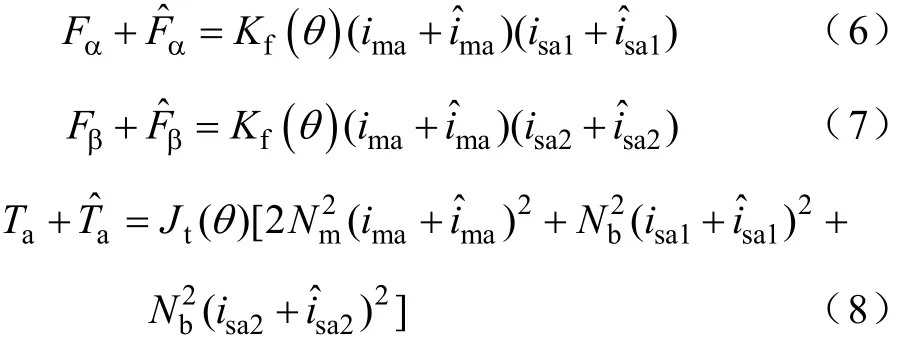
由式(4)~式(6)和式(1)~式(3)比较可得转矩和悬浮力的小信号模型为
由式(9)~式(11)可见,电流纹波对转矩和悬浮力的控制有较大的影响。因此减小电流纹波对无轴承开关磁阻电动机的稳定运行具有重要意义。而在三相半桥功率变换器工作期间,绕组两端电压始终为母线电压的 1/2,电流变化率大,使得相同开关频率下电流纹波相比三态控制时较大。
3.3 三相四桥臂功率变换器
以上三相半桥功率变换器实际运行中的不足,是由变换器电路拓扑和电动机本身控制特点引起的。针对此不足,本文将两个分裂电容用两个开关管替代,即在悬浮绕组功率变换器中采用三相四桥臂拓扑结构。虽然比半桥式变换器增加了两个开关器件,成本有一定上升,但此结构可带来以下优点:
(1)提高了电压利用率。开关管闭合时绕组端电压为母线电压,与原来三相半桥变换器相比提高了一倍。
(2)消除了中点电压漂移问题。在本系统中,电动机采用单相导通策略,所以绕组通电时相当于一个单相全桥变换器在工作,不论绕组电流正负和大小,都不存在中点电压漂移问题。而在原来三相半桥变换器中,由于外力不受控制,导致两个电容负载不一样,两个电容间中点电压出现偏差。
(3)降低了电流纹波。在三相半桥变换器中,电路结构决定了绕组端电压为正负母线电压的1/2,只能采用两态控制方式,电流变化率大。而在三相四桥臂变换器中,由于两个分裂电容用开关管替代,控制方式更加灵活,在两态控制基础上,加入零态控制,形成三态控制。由于在零态时,绕组端电压为零,因此电流的变化率相对于±1态要小。因此在相同的开关频率下,采用三态控制方式的三相四桥臂变换器电流纹波要比三相半桥变换器小,更有利于悬浮力和转矩的控制。
此外由于只有一个滤波电容,因此电容的充放电损耗也相应降低。当无轴承开关磁阻电动机工作在单相导通方式时,三相四桥臂变换器有以下三种工作模式。
(1)+1态。此时绕组端电压为母线电压Us,绕组电流增加,电源向绕组提供能量。绕组通正向电流时闭合 VT3、VT2;通负向电流时闭合 VT1、VT4,如图4所示。电路方程为
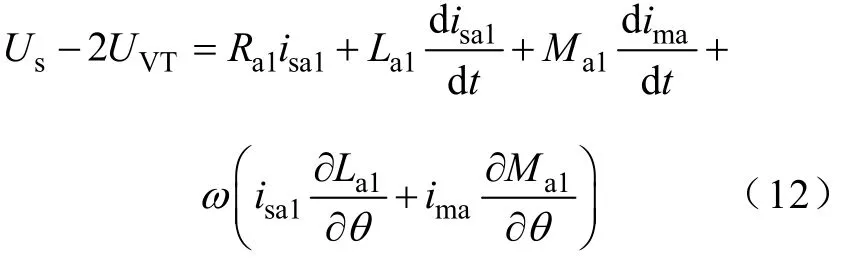
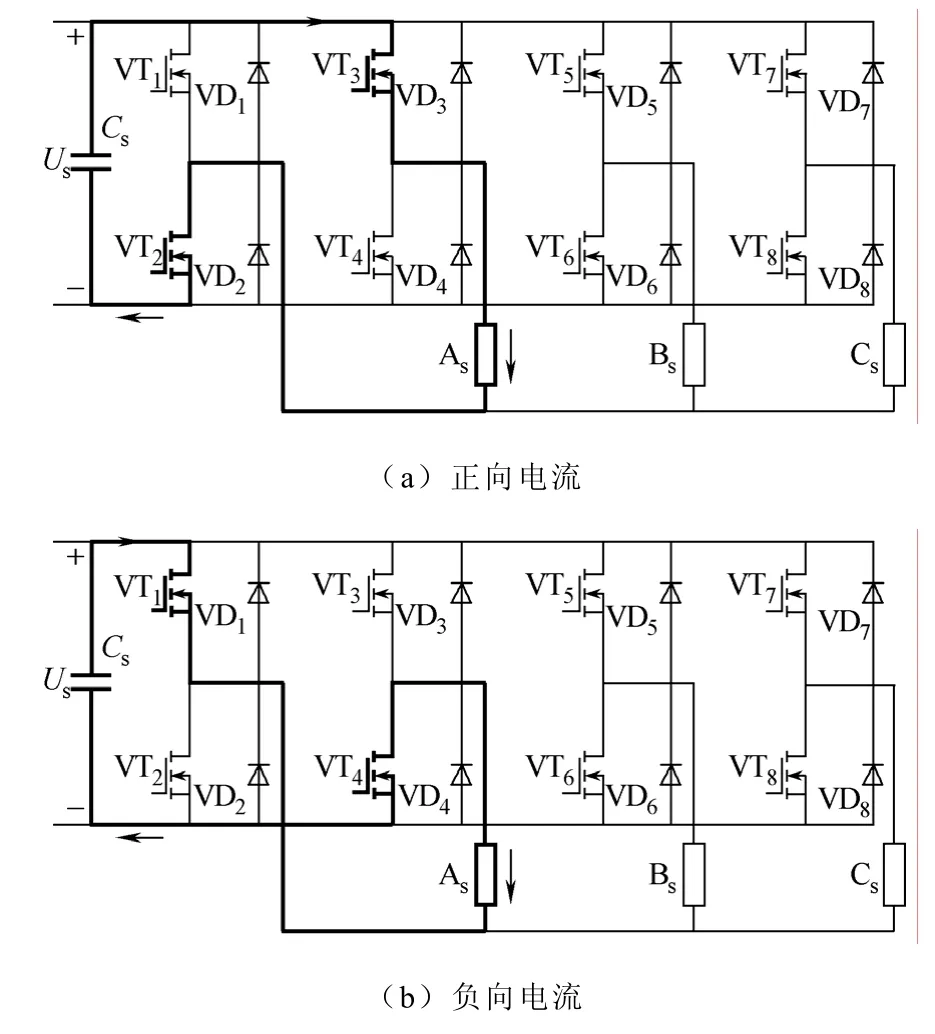
图4 三相四桥臂功率变换器模态1Fig.4 Mode 1 of three-phase four-leg power converter
(2)-1态。此时绕组电压为-Us,绕组电流减小,处于续流状态,向电容回馈能量。绕组为正向电流时,经 VD1、Cs、VD4构成回路;为负向电流时,经 VD3、Cs、VD2构成回路,如图 5所示。电路方程为
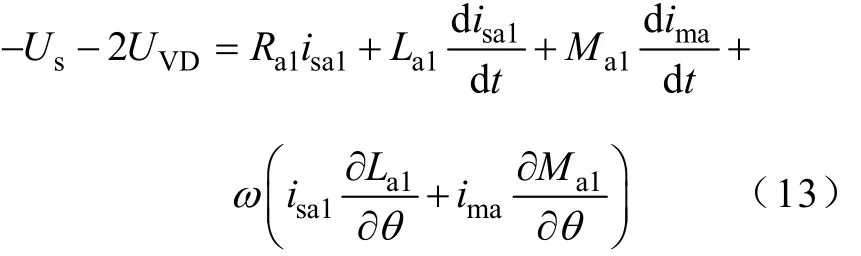
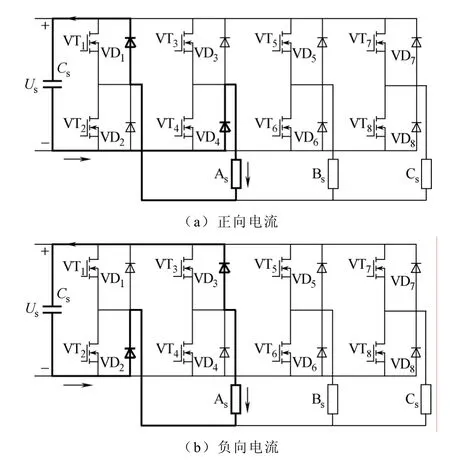
图5 三相四桥臂功率变换器模态2Fig.5 Mode 2 of three-phase four-leg power converter
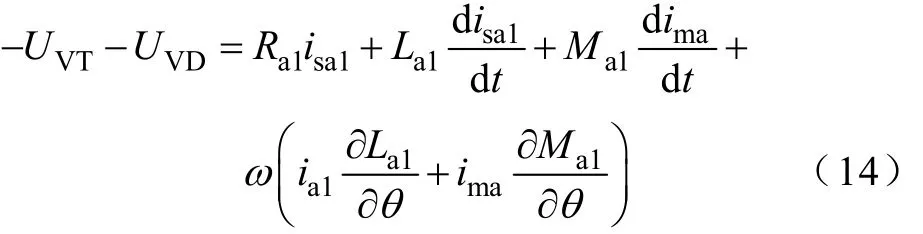
(3)0态。此时绕组处于自然续流状态,端电压近似为0V。正向电流时,VT3(或VT2)单独开通,绕组电流经 VT3(或 VT2)和 VD1(或 VD4)构成回路;负向电流时,VT1(或VT4)单独开通,绕组电流经 VT1(或 VT4)和 VD3(或 VD2)构成回路,如图6所示。电路方程见式(14)。
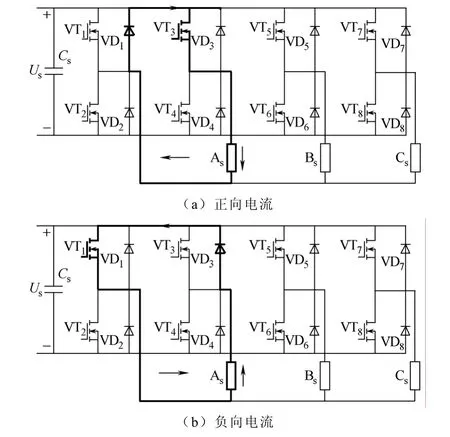
图6 三相四桥臂功率变换器模态3Fig.6 Mode 3 of three-phase four-leg power converter
4 两种变换器电流控制分析
电流跟踪控制方式有多种,如滞环控制、PWM控制、采样保持控制等[11-15]。如图1所示,由于在无轴承开关磁阻电动机中,悬浮绕组电流波形不同于异步机或同步机的正弦波形,所以采用滞环控制。
模拟滞环实现简单,但开关频率难以控制,且不适合于数字化以及更多控制算法的实现。由于无轴承开关磁阻电动机控制系统的核心为DSP2812,其自身带有高速的A/D转换口,所以本文电流跟踪控制采用数字滞环。数字滞环中开关管的开关频率不大于系统电流采样频率。根据以上分析,三相半桥功率变换器只能采用两态数字滞环控制方式,三相四桥臂功率变换器可采用三态数字滞环控制方式。为便于比较,以下分析中作如下假设:所有开关管和续流二极管均为理想器件;电源电压为恒定值;不考虑换相过程;电流滞环环宽远小于电流平均值;三相四桥臂变换器母线电压值为三相半桥变换器母线电压值的1/2。
在数字滞环控制方式下,设电流的给定控制环宽为 2Δi0,给定电流的平均值为i0,i′为三相半桥变换器电流,i为三相四桥臂变换器电流。设悬浮绕组变换器工作模式为+1态时,电流的变化率为k1;0态时电流的变换率为k0;-1态时电流的变换率为k2,数字系统控制周期(即采样频率)为T。下面以A相通正向电流为例分析两种变换器的电流控制。图7为两种功率变换器在数字滞环控制方式下的电流示意图。Uas为绕组电压。
如图7a所示,三相半桥变换器在两态控制方式下,每个采样时刻采样电流为i′,如果满足i′>i0+Δi0(t3时刻),则工作回路中的开关管(VT11)关断,变换器工作在-1态模式,电流下降;如果i′<i0-Δi0(t1时刻),则开关管闭合,变换器工作在+1 态模式,电流上升;如果i0-Δi0≤i′≤i0+Δi0(t2时刻),则开关管不动作,保持原来状态。
如图7b所示,当三相四桥臂变换器在三态控制方式下,采样得到绕组电流i满足i≥i0+Δi0时(t2时刻),工作回路中的两个开关管(VT2、VT3)关断,绕组端电压为负母线电压,变换器工作在-1态模式;当i≤i0-Δi0时(t5时刻),两个开关管闭合,绕组端电压为正母线电压,变换器工作在+1态模式;但当采样电流i满足i0-Δi0<i<i0+Δi0时(t3时刻),此时回路中两个开关管只保持一个开通(VT3或VT2),另外一个(VT2或VT3)关断,此时绕组端电压为零,变换器工作在0态模式,绕组处于自然续流状态。
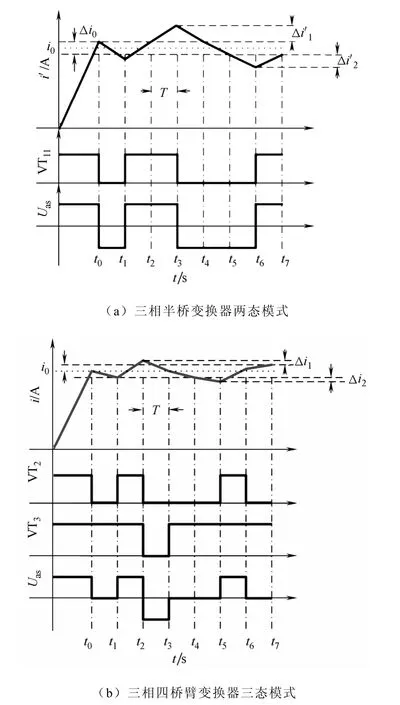
图7 数字滞环电流示意图Fig.7 The sketch of digital hysteresis loop current
在数字滞环控制方式下,控制器按控制频率采样电流经A/D转换后,与程序设定的环宽进行比较,输出开关管开关信号。由于数字控制方式是将连续信号离散,采样得到离散信号进行控制,有一定的滞后,因此实际电流的环宽要比程序设定的环宽大。两态控制模式和三态控制模式的实际电流环宽有所不同。

如图 7b所示,在三态控制方式下,设变换器t1时刻采样得到的电流为i=i0-Δi0,两开关管闭合(VT3、VT2),电流上升,则在t2时刻电流上升值为 2Δi0+Δi1=k1T;t4时刻采样得到电流i,近似为i0-Δi0,但比其略大,两开关管一个保持闭合(VT3),一个关断(VT2),电流下降,则t5时刻电流下降值为Δi2=k0T。所以在三态控制方式下,三相四桥臂变换器电流环的最大环宽为

将两种变换器实际电流环宽比较,得

假设开关器件为理想器件,由式(6)~式(7)和式(12)~式(14)得各种控制模态下电流变换率为

在相同的条件下,比较式(19)和式(20),易知k2>k0,即0态时的绕组电流变化率要小于-1态时的电流变化率。由上面分析和式(17),可知三态控制方式下电流的实际环宽要小于两态控制下电流的实际环宽。即三相半桥功率变换器的电流环宽要大于三相四桥臂功率变换器电流环宽。所以采用三相四桥臂功率变换器后,电流纹波降低。根据以上小信号模型分析可知,此时转矩和悬浮力的脉动减小,更有利于电动机的稳定控制。
5 实验结果与分析
根据以上分析,本文设计了无轴承开关磁阻电动机功率变换器,并在实验样机上进行了调试,图8为电动机样机,参数为定子铁心外径120mm,定子轭高5.75mm,定子极高24mm,转子外径60mm,转子轭高10mm,转子极高5mm,转轴直径30mm,轴向长度 75mm,定、转子极弧 15°,平均气隙长度0.25mm。主绕组:4极串联,14匝;悬浮绕组:2极串联,17匝。功率变换器开关管采用功率场效应管(MOSFET)。位移传感器采用电涡流传感器,其精度为18V/mm。
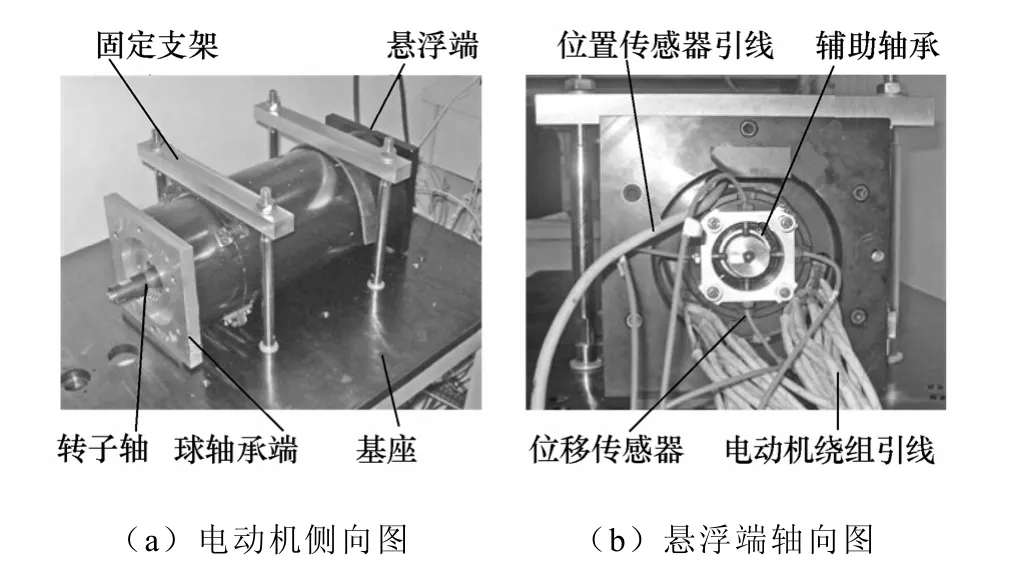
图8 电动机外观图Fig.8 Photograph of the motor
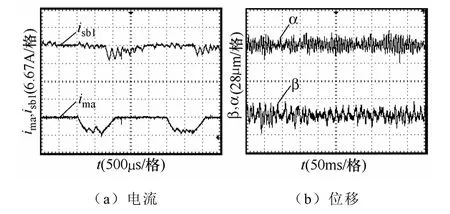
图9 三相半桥变换器实验波形Fig.9 Experimental waveforms of a three-phase half-bridge power converter
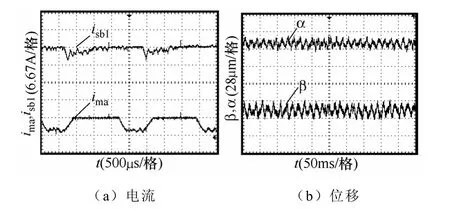
图10 三相四桥臂变换器实验波形Fig.10 Experimental waveforms of a three-phase four-leg power converter
图9是悬浮绕组功率变换器为三相半桥变换器时实验所得的电流波形和电动机转子位移波形。图10是悬浮绕组功率变换器为三相四桥臂变换器时实验所得的电流波形和电动机转子位移波形。为比较两种变换器对电动机悬浮性能的影响,两组实验外部电路参数相同,电动机控制参数相同,主绕组电流均为5A。由于转子重力的原因,相当于在电动机径向上施加了一个方向竖直向下,大小为50N的径向负载。
从图9和图10可以看出,两种变换器均能使电动机转子悬浮,但三相半桥变换器的电流脉动要比三相四桥臂变换器的大。采用三相半桥变换器时,实验测得的转子在α 和β方向上的位移波动范围均为880mV,约为50μm。采用三相四桥臂变换器时,实验测得的转子在α 和β方向上的位移波动范围分别为 460mV和560mV,约为26μm和 31μm。从以上对比实验可以看出,相对于三相半桥变换器而言,当悬浮绕组功率变换器电路拓扑采用三相四桥臂,电流控制采用三态控制时,绕组电流纹波有一定降低,转子位移波动范围变小,从而更有利于无轴承开关磁阻电动机对转子的稳定控制。
6 结论
本文针对三相半桥功率变换器的不足,提出用三相四桥臂变换器代替三相半桥变换器。这不仅消除了因半桥式变换器中点电压漂移对电动机控制带来的不利影响,而且在三相四桥臂变换器中,采用三态数字滞环控制方式,有效地降低了绕组电流纹波。实验结果证明悬浮绕组采用三相四桥臂变换器后,转子位移脉动减小,更有利于无轴承开关磁阻电动机的稳定控制。
[1] 邓智泉,严仰光.无轴承交流电机的基本理论和研究现状[J].电工技术学报,2000,15(2):29-35.
Deng Zhiquan, Yan Yangguang. The main theory and status quo of AC bearingless motors[J]. Transactions of China Electrotechnical Society, 2000, 15(2): 29-35.
[2] Bosch R. Development of a bearingless electric motor[C]. Proc. Int. Conf. Electric Machines(ICEM’88), Pisa(Italy), 1988: 373-375.
[3] Bichsel J.The bearingless electrical machine[C]. Proc.Int. Symp. Magnetic Suspension Technology NASA Langley Res. Center, Hampton, 1991: 561-573.
[4] 张媛,邓智泉.无轴承开关磁阻电机控制系统的设计与实现[J]. 航空学报,2006,27(1):77-81.
Zhang Yuan, Deng Zhiquan. Design and realization of bearingless switched reluctance motor control system[J]. Acta Aeronautica Et Astronautica Sinica,2006, 27(1): 77-81.
[5] Takemoto M,Shimada K,Chiba A,et al.A design and characteristics of switched reluctance type bearingless motors[C]. Proc. NASA/CP- 1998-207654,Gifu, Japan, 1998: 49-63.
[6] Takemoto M, Chiba A, Fukao T.A method of determining advanced angle of square-wave currents in a bearingless switched motor[J].IEEE Trans. on Industry Application, 2001, 37(6):1702-1709.
[7] Takemoto M, Chiba A, Fukao T.A new control method of bearingless switched reluctance motors using square-wave currents[C]. Proceedings of the 2000 IEEE Power Engineering Society Winter Meeting. Singapore, 2000: 375-380.
[8] Takemoto M, Suzuki H, Chiba A, et al.Improved analysis of a bearingless switched reluctance motor[J].IEEE Trans. on Industry Application, 2001, 37(1):26-34.
[9] 邓智泉,杨钢,张媛,等.一种新型的无轴承开关磁阻电机数学模型[J]. 中国电机工程学报,2005,25(9):139-146.
Deng Zhiquan, Yang Gang, Zhang Yuan, et al. An innovative mathematical model for a bearingless switched reluctance motor[J]. Proceedings of the CSEE, 2005, 25(9): 139-146.
[10] Sun Jianbo, Zhan Qionghua, Liu Liming. Modelling and control of bearingless switched reluctance motor based on artificial neural network[C]. IEEE IECON 2005, 2005: 1638-1643.
[11] Barnes M, Pollock C. Power electronic converters for switched reluctance drives[J]. IEEE Trans. on Power Electronics, 1998, 13(6): 1100-1111.
[12] Frede Blaabjerg, Philip C Kjaer, et al. Improved digital current control methods in switched reluctance motor drives[J]. IEEE Trans. on Power Electronics,1999, 14(3): 563-572.
[13] 陈昊,谢桂林.开关磁阻调速电动机的功率变换器设计[J].中国矿业大学学报,1998,27(2):158-161.
Chen Hao, Xie Guilin. Design of power converter for switched reluctance motor drives[J]. Journal of China University of Mining & Technology, 1998, 27(2):158-161.
[14] 阮新波,严仰光. 四桥臂三相逆变器的控制策略[J].电工技术学报,2000,15(1):61-64.
Ruan Xinbo, Yan Yangguang. The control strategy for three-phase inverter with four bridge legs[J].Transactions of China Electrotechnical Society, 2000,15(1): 61-64.
[15] 杨钢.无轴承开关磁阻电机实验平台的开发与研制[D].南京:南京航空航天大学,2003.
