偏离运动仿真在供弹机构故障分析和优化设计中的应用
2010-06-27张相炎董志强
程 刚,张相炎,董志强,张 俊
(1.南京理工大学机械工程学院,江苏南京 210094;2.长安工业集团公司,重庆 400023)
小口径高射频自动炮在高速射击过程中,供弹构件之间存在复杂的冲击和碰撞,不合理的结构设计会造成供弹机构无法准确完成规定的运动循环,出现炮弹卡滞和停射等严重故障,由于机构运动关系复杂,难以确定故障的原因。本文利用偏离运动仿真方法,模拟并复现了某自动炮供弹机构卡滞的故障现象,分析了炮弹卡滞的原因,通过优化拨弹轮的初始定位角度,解决了供弹卡滞问题,为此类机构的故障分析和优化设计提供了一种有效的分析手段。
1 供弹机构的卡滞故障现象
某自动炮采用了新型双路供弹机构,如图1所示。当上路供弹时,下路的拨弹轮3、4处于机械锁死状态,拨弹轮2拨动炮弹沿路径 AB运动到B点,由拨弹轮1把炮弹输送至自动炮进弹口并完成供弹。当下路供弹时,控制拨弹轮2旋转至72°角的整数倍处,并机械锁死,拨弹轮1、3和4同步转动,炮弹由4沿圆弧CD被输送到D点,在拨弹轮3作用下沿直线DE被输送到E点,并被切换到拨弹轮1,由拨弹轮1输送到自动炮进弹口并完成供弹。
在实验室进行供弹通畅性试验时发现,高速供弹时,下路供弹的拨弹轮拨弹阻力较大,在供弹过程中出现了卡滞现象,有些炮弹表面被压变形。
2 供弹机的偏离运动仿真
2.1 建立供弹机构偏离运动仿真模型
本文采用偏离运动仿真研究供弹故障的原因,由于供弹机的组成结构形状复杂,利用专业CAD软件建立三维实体模型[1],转化为Parasolid格式并导入机械动力学仿真软件ADAMS中,建立高速供弹机构的参数化仿真模型[2-3],其中,炮弹与拨弹轮和导轨均为接触碰撞,各拨弹轮与转轴铰接,4个拨弹轮的铰接副采用关联副连接,等速转动把炮弹从弹箱快速输送至自动炮进弹口。
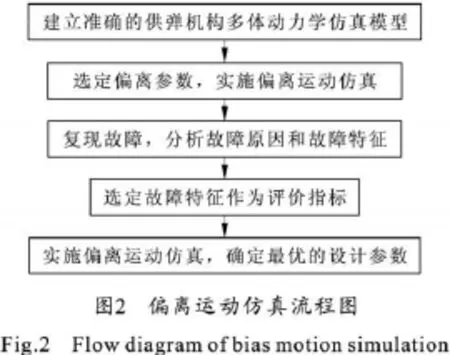
供弹机偏离运动仿真的流程如图2所示。首先建立准确的供弹机构多体动力学仿真模型,通过调整拨弹轮的初始定位角,有选择地使拨弹轮偏离初始的位置,在每个偏离因素组合下,进行动力学仿真,直观地显现供弹机构供弹过程中可能出现的供弹不畅、卡滞等故障现象,分析故障特征,以某个故障特征为评价函数,找出优化的设计参数。
2.2 供弹机构偏离运动仿真和故障分析
为了便于分析各拨弹轮的定位角度对供弹平稳性的影响,利用ADAMS二次开发模块编制了偏离运动仿真驱动模块,输入偏离变量,即可实现拨弹轮初始定位角度的调整和偏离运动仿真。
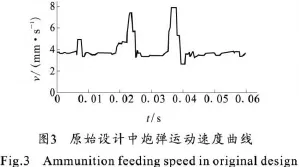
对原始设计的供弹机构进行偏离运动仿真后发现,在高速供弹过程中,拨弹轮1、3和4运动是不协调的,特别是炮弹在拨弹轮3和1切换过程中,两个拨弹轮的齿弧挤压炮弹,引起炮弹剧烈抖动。动力学仿真得到的炮弹运动曲线如图3所示,可以看出该故障的特征是:当拨弹轮运动不协调引起卡滞时,炮弹的运动速度波动比较大,而且,卡滞越严重,炮弹的运动速度波动越大。进一步的分析表明,炮弹运动速度的波动可以作为供弹卡滞的故障特征,运动速度波动越大,说明供弹卡滞越严重。
2.3 拨弹轮定位角度的优化
设定各拨弹轮的初始定位角度为变量,按步长为0.1密位进行偏离运动仿真,以炮弹的运动速度波动为评价指标,进行优化分析,找出各拨弹轮最佳的初始定位角度。部分仿真结果如图4所示。
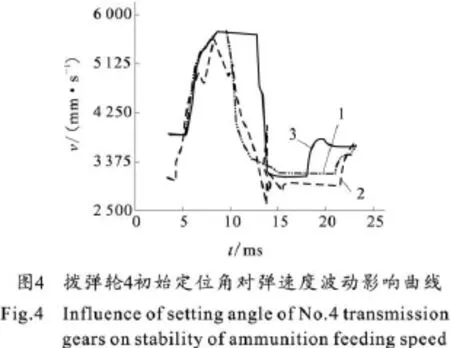
图4中:曲线1、曲线2和曲线3分别为拨弹轮4偏离原始设计角度0、-1和1密位时炮弹运动速度。可以看出,在原始的初始定位角调整1密位时,炮弹运动速度的瞬态波动不很明显,但运动速度曲线的局部瞬时变化较大,仍存在速度变化不连续现象;初始定位角为-1密位时,炮弹运动速度存在非常剧烈的波动;初始定位角调整0密位时,炮弹的运动速度变得较平稳,和曲线2及曲线3相比,炮弹的运动速度没有明显的不连续现象。
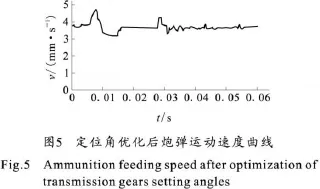
按同样的方式完成拨弹轮3、拨弹轮2和拨弹轮1的偏离运动仿真,通过对偏离运动仿真的结果进行比较和综合权衡,以炮弹运动速度最平稳为优化目标,最终确定4个拨弹轮优化的初始定位角,优化后炮弹的运动速度曲线如图5所示,和图3相比,炮弹运动速度的波动明显降低。
2.4 测试结果
按照偏离运动仿真优化分析的结果,重新定位各拨弹轮的初始定位角,并进行了靶场实弹测试,试验表明,改进的供弹机构能顺利供弹,而且供弹阻力较小,使用可靠性高,满足设计任务的要求。
3 结 论
利用偏离运动仿真,直观地复现供弹机构供弹不畅、卡滞的故障现象,确定拨弹轮定位不协调是故障的原因,根据卡滞会引起炮弹运动速度波动较大的故障特征,以炮弹运动最平稳为优化目标,通过参数化驱动偏离运动仿真,实现了供弹机构定位角度的优化。采用本文提出的偏离运动仿真方法,可以快速确定故障的原因,为此类供弹机构的故障分析和优化设计提供了一种有效的分析手段。
[1] 王立新,黄文良.基于虚拟样机的无返回力矩钟表机构动摩擦系数确定方法[J].兵工学报,2006,27(3):406-409.W AN Li-xin,HUANGW en-liang.An innovativemethod of determ ining the kinetic friction coefficient based on the virtual p rototype of runaway escapement[J].A cta A rmamentarii,2006,27(3):406-409.(in Chinese)
[2] 倪进峰,徐诚,王亚平.基于虚拟样机技术的自动武器数值仿真[J].南京理工大学学报,2005,29(1):430-432.NI Jin-feng,XU Cheng,W ANG Ya-ping.Numerical simulation o f automaticw eapons based on virtual p rototype technology[J].Journal of Nanjing University of Science and Technology,2005,29(1):430-432.(in Chinese)
[3] 郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.ZHENG Jian-rong.ADAMS accidence&improvement o f virtual p rotype technology[M].Beijing:China Machine Press,2002.(in Chinese)
