基于随机滤波器的SMPM电机定子电阻辨识*
2010-06-26南京师范大学电气与自动化工程学院江苏南京210042孙频东姜晓亮
南京师范大学电气与自动化工程学院(江苏南京210042) 孙频东 姜晓亮
1 引言
使用稀土永磁材料的新一代三相交流电机具有较高的功率密度和效率,受到研究机构和工业界广泛的关注,交流永磁电机及其控制系统在国防和民用领域有着广泛的应用领域,降低电机控制系统的成本、缩小体积和提高永磁电机控制系统的性能一直是研究者关心的问题。将随机滤波器应用于控制系统,实现对系统参数的辨识,有利于提高控制系统的性能。虽然,随机滤波器是一种递推算法,但由于电机模型本身的复杂性使得该算法的计算工作量较大[1-6],需要对一个四阶矩阵作求逆运算。从国内研究机构发表的论文[7,8]看,他们使用的也是永磁电机的全阶模型。文献[9]在对模型的处理上,使用了降阶算法,使控制算法的计算量大大降低,但该方法需要使用一个速度传感器,来提供电阻辨识过程中需要的转速和转角量。如何在辨识过程中能既不使用速度传感器,又能降低计算的工作量是一个值得深入研究和探讨的问题,本文采用的混合辨识方法为解决这一问题提出了一条有效的途径。即用滑模算法对电机系统的速度进行辨识,用随机滤波器对永磁电机定子电阻进行辨识。因为滑模速度观测器具有对定子电阻变化不敏感的特点[10],另外,滑模转速位置观测器的算法简单易于实现。由于将电阻值的辨识和位置、转速辨识分开,因此,系统的中断响应时间得到缩短。
2 交流永磁电机的数学模型
在静止坐标系下,SMPM电机的数学模型如(1)式所示:
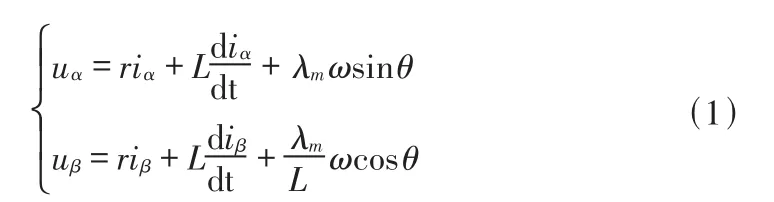
式中,iα,iβ为静止坐标系 α、β 坐标下的电流分量,uα,uβ为静止坐标系α、β坐标下的电压分量,ω为
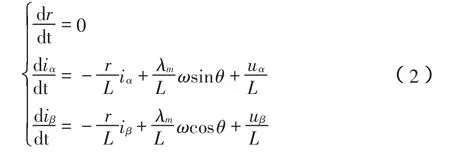
转子的角速度,θ为转子的转角,λm为主磁通,r为定子绕组的电阻。为了能辨识定子绕组中的电阻,对(1)式进行相应变化后,再增设项,该项认为绕组中电阻值的变化较电流、电压量的变化慢得多,同时认为在电阻辨识过程中转子转速 ω和位置角 θ均为已知量,由此电机方程状态方程和输出方程可表示成如(3)式所示形式,

考虑到电机模型的非线性,用Jacobian对(2)式进行近似处理,并离散化,再考虑系统的随机干扰 wk和测量误差 vk,得到电机离散状态空间模型如(4)式所示。(4)式中 δxk为离散化后状态变量的增量,式中的 Γ(xk)和 Δ( xk)如(5)、(6)两式所示。
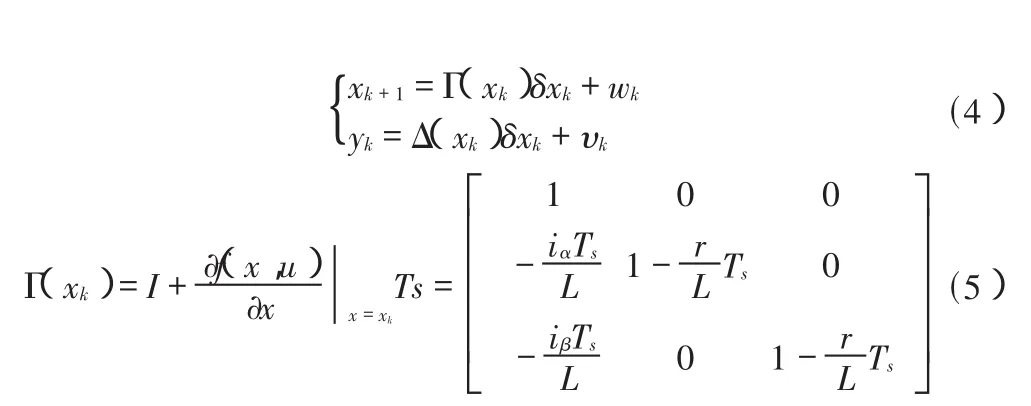
(5)式中的 Ts为系统的采样周期。

3 随机滤波算法和滑模速度观测
3.1 随机滤波算法
用扩展的Kalman滤波算法,即EKF算法,作为随机滤波器,用于观测电机运行过程中定子绕组电阻值的变化,递推公式如(7)、(8)式所示。

式中 Kk+1阵为Kalman滤波器的增益阵,Pk+1/k,Pk+1/k+1阵为状态的协方差阵。下标 k+1/k的意义为用过去的值估计现在值,而下标 k+1/k+1的意义将已得到的估计值再进行校正后得到的值。另外,还有随机噪声Q和测量噪声R的协方差阵。在递推算法中需要几个初值设定如下: x0/0=[r iα iβ]T=[0 0 0]T
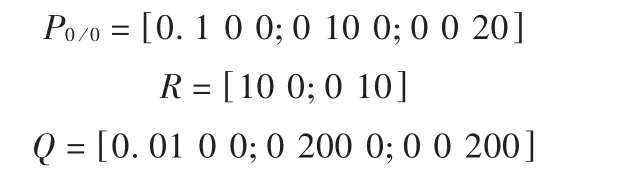
P、Q、R等参数的确定,可以通过优化的方法获取,选取不同的数值会影响算法的收敛速度。从(7)、(8)式可以得出(9)、(10)的递推算式。

3.2 滑模速度观测
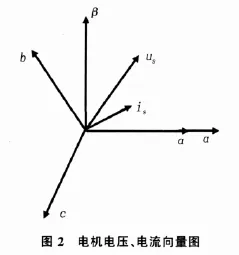
在定子绕组辨识计算中,需要有电机转角位置和转速信息,这里用滑模观测提供转角位置和转速的信息。滑模观测器的结构图如图1所示[10]。图1中的滑模电流观测算法如式(12)所示,式中的A、B为二阶矩阵,如(13)、(14)式所示,L 为相电感,电流 is、电压 us和反电势 es均为向量,如(15)式所示。带波浪号“~”的为估计值,由于电流误差信号中包含反电势信息,经低通滤波后得到;电流误差,经开关切换控制后,得到z信号如(16)式所示;低通滤波的计算公式如(17)式;转子磁通位置的计算如(18)式所示,另外,is和 us的向量图如图(2)所示。
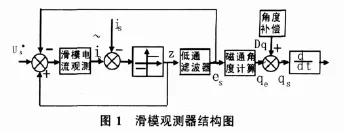
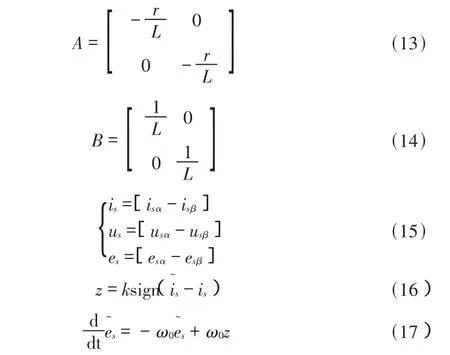
(17)式中的 ω0为滤波器的截止频率,通过(18)式可以计算出转子磁通的位置,如(19)式所示。

由于滤波器的加入,产生了相位滞后,因此,需要有一个角度补偿,补偿位置如图1所示,补偿角的计算如(20)式所示。

(20)式中的 ω0涵义同(17)式,ω为电机转子的电角速度。
4 结果和分析
?
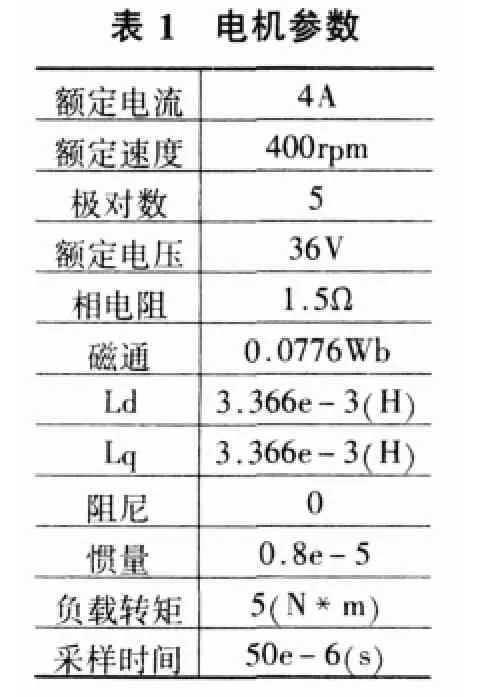
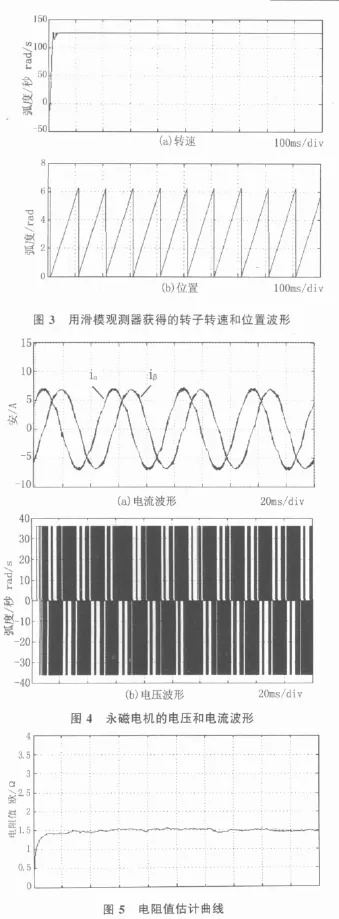
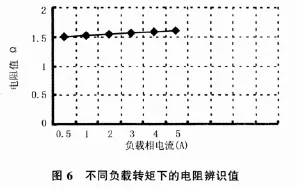
对具有如表1所示参数的电机进行实验得到的结果如图3,4和5所示。电机的设定转速为240rpm,图3为用滑模观测器得到的转子位置和转速信息;图4为通过电流和电压传感器得到的在静止坐标轴α-β轴上的电流波形和脉宽调制的PWM电压波形图;图5为用随机滤波器估计得到的电阻值变化曲线,从图中可以看出估计误差很小。在不同的负载下,对估计值进行比较可以得到电阻估计值随负载的变化曲线,变化曲线如图6所示,和实际值进行比较非常接近,在负载电流较小时,和实际值比较误差较小,随着负载电流的增加误差变大,这和预计情况相同,负载电流增大引起定子发热使等效电阻增加。
5 结论
用电机的全阶随机滤波器模型,同时对电机的转速、位置和定子绕组电阻进行辨识有相当的计算工作量。使用本文提出的混合辨识方法对定子电阻进行辨识,辨识模型的阶次能有效降低,由此使辨识的计算工作量明显减少,辨识中断所需的计算时间缩短。用滑模观测器替代位置传感器,辨识电机的转速和转子的位置,具有辨识结果准确,辨识算法简单,计算工作量小的优点,因此和随机滤波器结合,在对定子绕组阻值的辨识中,能得到良好的辨识精度。
[1]R.Dhaouadi,N.Mohan,and L.Norum.Design and implementation of an Extended Kalman Filter for the state estimation of a permanent magnet synchronous motor. IEEE Transactions on Power Electronics,1991,7(6):491 ~497.
[2]S.Bolognani,M.Zigliotto,and M.Zordan.Extended-range PMSM sensorless speed drive based on stochastic filtering.IEEE Trans.Power Electronics,2001,1(16):110 ~ 117.
[3]S.Bolognani,R.Oboe,and M.Zigliotto.Sensorless full-digital PMSM drive with EKF estimation of speed and rotor position.IEEE Transactions on Industrial Electronics,1999,2(46):184 ~ 191.
[4]L.Salvatore,and S.Stasi.Application of EKF to parameter and state estimation of PMSM drive.IEE Proceedings-B,1992,5(139):155 ~ 164.
[5]Yoon-Ho Kim,and Yoon-Sang Kook.High performance IPMSM drives without rotational position sensors using reduced-order EKF.IEEE Transactions Energy Conversion,1999,14(4):868 ~873.
[6]M.Cernat,V.Comnac,and R.M.Cernat.Sensorless control of interior permanent magnet synchronous machine using a Kalman filter.Industrial Electronics,2000.ISIE 2000.Proceedings of the 2000 IEEE International Symposium on Volume 2,2000,9:401 ~ 406.
[7]张猛,肖曦,李永东.基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J].中国电机工程学报,2007,27(36):36 ~ 40
[8]陈镇,刘向东,靳永强,戴亚平.采用扩展卡尔曼滤波磁链观测器的永磁同步电机直接转矩控制[J].中国电机工程学报,2008,28(33):75~81.
[9]孙频东.基于EKF算法的交流永磁无刷同步电机参数辨识[J].电气自动化,2008,30(3):17 ~ 20.
[10]宋丹,胡春华,孙承波,陈国呈.基于滑模观测器的永磁同步电机控制系统研究[J].电力电子技术,2007,41(3):9 ~11.